“工业机器人编程与操作”课程混合式教学改革探索
2021-04-04杨柳曼万丽琴
杨柳曼 万丽琴


摘 要:随着智能制造人才需求逐年增多,对培养学生综合能力提出了更高的要求,如何将传统的知识传授为主的课堂转变为以培养学生能力为主的课堂,从而提升学习效果成已成为核心问题。以“工业机器人编程与操作”课程为例,对混合式教学改革进行了研究、实践和探索,形成“课前预习—课中练习—课后复习”教学活动紧密联系的学习形式,强化综合能力培养,深化育人效果。
关键词:工业机器人;混合式教学;课程改革
中图分类号:TP39;G642 文献标识码:A 文章编号:2096-4706(2021)18-0191-04
Abstract: With the increasing demand for intelligent manufacturing talents year by year, higher requirements are put forward for cultivating students comprehensive ability. How to change the traditional classroom based on knowledge teaching into a classroom based on cultivating students ability, so as to improve the learning effect has become a core problem. Taking the course of “industrial robot programming and operation” as an example, this paper has studied, practiced and explored the blended teaching reform, forms a learning form that the following teaching activities are closely related together: pre class preview, in class practice and after class review, strengthens the cultivation of students comprehensive ability and deepens the effect of education.
Keywords: industrial robot; blended teaching; course reform
0 引 言
《中国制造2025》规划中提出,要把智能制造作为信息化与工业化深度融合的主攻方向,其中工业机器人被认为是实现目标的关键,我国企业对这方面的人才需求逐年递增[1]。当前,各大院校都开设了工业机器人相关课程,但在教学中仍然以传统的教学方式居多,学生学习效果不理想[2]。混合式教学,最早是20世纪90年代在企业培训中出现,是一种线上和线下学习结合的基本教学形式,将不同类型的学习资源、学习策略和学习活动进行有机融合,从而达到教育效益最优化的一种教学模式[3]。采用混合式教学,有助于学生加强课前预习,加深对课堂教学重难点的理解和灵活运用,更好地掌握基本技能,满足未来对工业机器人技能人才的需求。
1 “工业机器人编程与操作”课程教学现状
“工业机器人编程与操作”是一门智能制造专业群的核心课程,涵盖了工业机器人基本操作、在线编程、离线编程、PLC应用、视觉检测技术等知识点和技能点[4],是培养学生熟练掌握工业机器人操作技能、提升职业能力和素养的重要渠道。目前仍然采用传统教学方法居多,教师演示操作过程,学生模仿教师操作反复练习直至熟练,这个模仿过程学生不需要自己思考,严重制约了学生学习效率,导致学生对知识的理解和应用有很大的局限性,职业技能和综合能力并没有得到很大的提高,教学质量难以达到显著的效果。另一方面,大部分学校的工业机器人教学设备数量有限,每个学生动手操作的机会比较少,实操时间短,学生的实践技能很难得到提升,并且高职学生的自制力和自主性都较差,专注力不够,在其他学生操作的时候,一部分学生则觉得枯燥乏味、无所事事,影响教学效果[5]。因此,在教学中运用混合式教学,激发学生的学习兴趣,更好地掌握专业知识技能,有效改变当前的教学现状。
2 教学内容重构与资源库建设
传统教材知识更新较慢,与当前工业机器人应用编程1+X证书技能要点融合不足[6],按照“学以致用”的原则,对“工业机器人编程与操作”进行任务式处理,实现以能力为本位,构筑职业和技能相融合、符合教学新需求的教学内容重构。将课程设计为“初识工业机器人”“工业机器人的基本操作”“工具坐标系的建立”“工件坐标系的建立”“IO板的配置及使用”“运动轨迹实验”“五轴机床上下料综合应用”七个学习任務。
为充分发挥混合式教学的优势,重新整理教学资源,建设符合本校教学特色的教学资源库。具体为:
(1)制作微视频。以知识目标、能力目标、素质目标为依据,梳理每次课堂的重难点,录制成微视频,上传至信息化教学平台,方便学生课前预习、课后复习。
(2)设计电子任务工单。将新课堂中的重难点和学生已掌握的知识点串联起来,制作电子任务工单发布给学生,课前学生根据工单明确学习任务,课中通过仿真练习、编程实操完成任务并记录,课后反思总结、优化改进,实现任务工单贯穿教学全过程。
(3)软硬件资源有效结合。课堂中利用工业机器人操作平台、智能制造生产线和仿真实训平台教学,课堂外利用ABB RobotStudio、PQArt等离线仿真软件真实再现机器人工作场景。gzslib2022040512103 教学设计与实施
3.1 教学策略
本课程采用“激趣”“创境”“释疑”“巩固”教学策略,“激趣”即通过视频,案例等引导学生思考,激发学生自主学习的兴趣;“创境”即创设工业机器人操作环境,借助案例鼓励学生积极探索,合作学习;“释疑”即学生在解决问题过程中遇到难以解决的问題,教师进行解答,“巩固”即进行课中综合实践,从而提高学生的操作编程应用能力。
3.2 整体教学设计
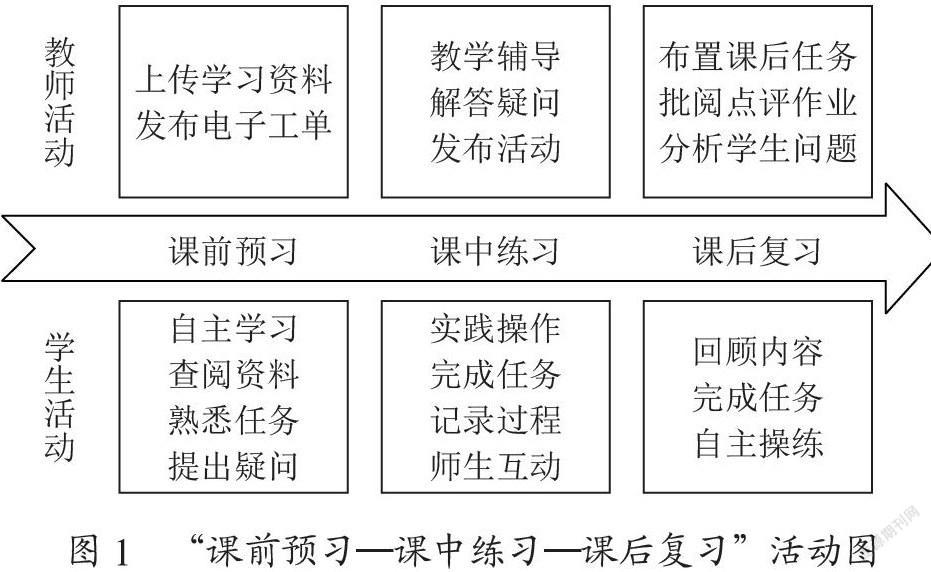
充分运用网络教学平台及资源和仿真实训平台及系统,开展“课前预习—课中练习—课后复习”的教学活动,如图1所示,环环相扣,紧密联系,保证教学效果。
具体为:
(1)课前预习:教师在课前做好课堂规划,在网络教学平台上传视频、图片、PPT、等多种学习资料,发布电子任务工单,引导学生完成课前信息收集和归纳、自主学习相应内容,将疑问记录下来带到课堂上释疑。
(2)课中练习:遵循“学生练为主,教师教为辅”的教学理念,教师引导学生完成工单中的任务,解决学生在课前预习时遇到的问题。结合课堂测验、头脑风暴、小组讨论、编程案例等教学活动,考查学生对相应知识的掌握情况,实时检验学习成果,动态调整教学策略。
(3)课后复习:教师在网络学习平台发布离线编程、拓展思考等任务,学生结合课堂知识点和学习资料在规定时间内完成任务,利用离线仿真软件巩固工业机器人操作技巧。学生的完成情况可在平台上及时查看,教师通过批阅和点评作业,总结分析学生存在的薄弱点和典型性问题,并准备在下次课堂上进行讲解和分析。
3.3 教学实施过程
“工业机器人编程与操作”课程中,运动指令的应用和运动轨迹规划是能够实现工业机器人按照预设路径进行自动运行的重要知识点和技能点。运动指令包括MoveJ、MoveL、MoveC、MoveAbsJ,每个指令中还有位置点、速度、转弯半径、工具坐标系和工件坐标系等参数的设置,这些指令的运动方式各有不同,参数设置的不同也会使运动轨迹发生变化。在教学过程中,若单纯以传统方式进行理论教学,学生很难直观地理解各种运动方式和参数变化之间的区别。因此,“运动轨迹实验”任务内容实施过程中,按照“课前预习—课中练习—课后复习”的基本活动,采用混合式教学能够有效将知识点和技能点化解,从而提升学生技能水平。
3.3.1 课前预习
教师在网络教学平台上传课件、视频、动画、电子工单等教学资源,如图2所示,包括每个运动指令的讲解微视频和课件,学生通过平台及APP进行课前预习,查阅相关资料,对各个运动指令有一个初步的认识,理解指令中每个参数代表的含义,教师在电子工单中明确工作任务,学生开展线上互动学习与讨论,打破线下教学壁垒,形成跨时间、跨空间的学习氛围,激发学生兴趣,培养学生创新思维与自主学习能力。
3.3.2 课中练习
教学过程中,“学生练为主,教师教为辅”,以任务工单为引领,具体工作任务为载体,通过团队合作的形式,在仿真实训平台完成既定的工作任务,如图3所示,学生通过操作示教器进行轨迹编程和点位示教,实现工业机器人按照预定的轨迹运行,仿真实训平台模拟工业机器人端,兼容了真实的手持示教器,在确保初学者操作安全的情况下,提升学生使用示教器的熟练度,在得到教师允许后再以团队的形式在实操平台进行操作,不断巩固实操技能。利用网络教学平台,开展小组练习、头脑风暴等教学活动,加强师生互动、生生互动,培养学生的团队精神。学生将课前预习遇到的疑问带入课堂释疑,教师对学生实践操作进行指导,加深学生对运动指令和轨迹规划的理解,针对学生容易出错、遗漏、不理解的地方着重分析讲解,进一步提升学生的实操技能,培养学生的钻研精神以及发现问题、解决问题的能力。
3.3.3 课后复习
教师将课后任务发布在网络教学平台,如图4所示,学生通过课间知识点的吸收归纳,利用仿真软件和仿真实训平台,通过不断练习,不断巩固当前知识,完成离线编程任务,对工业机器人的操作加以熟练巩固,不断提升操作技能,提高动手能力。教师在网络平台查看学生的完成情况并点评分析,总结学生存在的典型问题主要是转弯半径的设置不合理,导致实际运动路径与预期路径存在偏差,因此在下一次的课堂上,将这个知识点单独重点讲解,并通过实例对比转弯半径设置不同导致运动轨迹不同的区别,加深学生对转弯半径的理解。
3.4 学生综合能力评价
以多方位评价模式、多维度评价内容、多环节评价手段,借助网络教学平台,综合评价学习效果,促进学生职业技能的培养。学生综合能力评价体系如表1所示,其中平时表现和综合测评各占50%,平时表现分为线上评价和线下评价,线上主要考查学生的资料搜集整理能力和学习态度,线下主要考查学生的团队合作、职业素养和操作能力;综合测评分为阶段考核和期末考核,阶段考核主要考查学生对单个知识点的掌握和应用,期末考核主要考查学生对所学知识点的综合运用能力。
3.5 教学效果分析
“工业机器人编程与操作”混合式教学改革探索运用在我校2019级数控专业的教学中,与上一届同专业同课程进行对比发现,教学模式的改变,使学生的学习兴趣较往届有很大的提高,从“要我学”逐渐变成“我要学”。经过一学期的教学,学生对工业机器人相关知识和技能掌握更好,不再是局限于课本上的理论知识或虚拟仿真软件上的“鼠标”操作,而是具备了更强的实践操作技能,更有利于培养符合企业用人需求的技能型人才。
4 结 论
混合式教学,将传统的“教师知识传授”转变至“学生能力培养”上,从实践-理论-实践的教学重构,以小组合作为手段,创建高真实度的虚拟环境,结合电子任务工单,充分调动学生积极性,增强师生互动,不断促进学生综合能力的养成,有效提升课堂教学质量。
参考文献:
[1] 官文,熊杰,卢峰.中国制造2025背景下工业机器人技术人才培养初探 [J].课程教育研究,2020(11):238.
[2] 沈玲,刘甘霖.SPOC环境下混合教学模式研究——以“工业机器人编程与操作”课程为例 [J].湖北工业职业技术学院学报,2020,33(5):82-84.
[3] 赵达.基于混合学习的工业机器人技术专业教学设计与开发 [D].天津:天津大学,2017.
[4] 刘大龙,丁铎.项目式教学在《工业机器人操作与编程》课程中的实践研究 [J].电脑知识与技术,2021,17(5):144-145+169.
[5] 潘贇.任务引领型教学法在工业机器人编程与操作教学中的应用 [J].现代职业教育,2021(26):118-119.
[6] 卢峰,曾小山.“1+X”证书下的《工业机器人编程与操作》课程建设研究——以江西环境工程职业学院为例 [J].课程教育研究,2020(41):89-90.