基于ADAMS的轿车操纵稳定性仿真分析
2020-05-13梅雪晴姚鹏华
梅雪晴 姚鹏华

摘 要:通过建立某轿车整车ADAMS多体动力学模型,按照国标要求进行整车稳态回转试验、角跃阶输入和转向回正性试验的操纵稳定性仿真,仿真结果表明该车的操纵稳定性良好。
关键词:整车模型;操纵稳定性;仿真
1.引言
汽車的操纵稳定性是“高速车辆的生命线”[1],对高速汽车的行驶安全具有绝对重要的作用。操纵稳定性研究的内容非常多,实车实验耗时耗力,而且具有一定的危险性。本文将采用ADAMS动力学仿真的方法来获得部分操纵稳定性实验的仿真结果[2],为轿车操纵稳定性研究提供分析依据。
2.整车仿真模型的建立
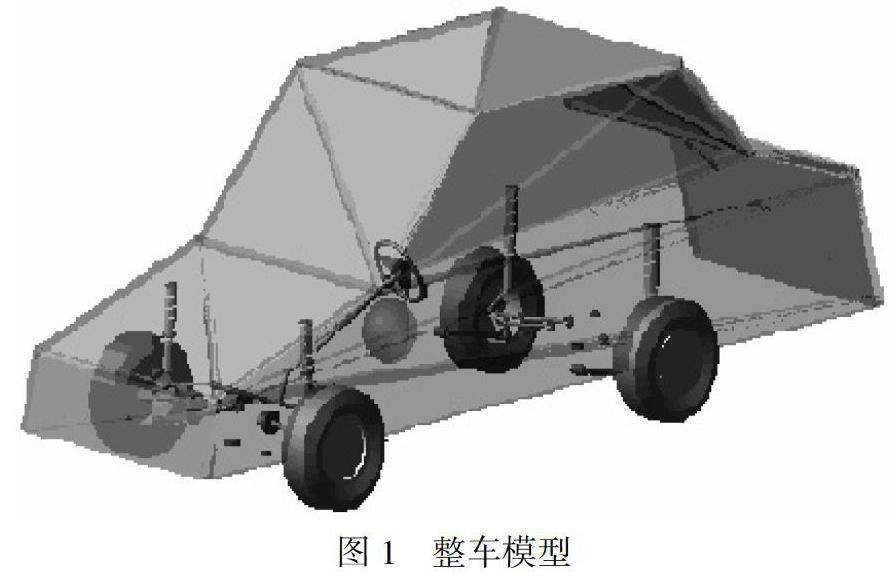
为了简化计算和抓住动力学的本质,需要对整车模型作适当的简化。整车质量参数、运动学参数和力学特性参数由厂家提供,外界参数(如路谱)由ADAMS软件系统提供。整车模型包括转向、前悬架、后悬架、前轮胎、后轮胎以及车身等子系统。每个子系统均先在ADAMS模板上建立模型,再建立相应的子总成,通过信息交换器将各个子总成组合成轿车的整车模型[3]。其中转向系统为齿轮齿条式,前悬架为麦式独立悬架,后悬架为双连杆式独立悬架,前后轮胎型号均为175/70 R13,整车模型见图1,模型部分具体参数见表1。
3.整车操纵稳定性仿真与结果分析
评价汽车操纵稳定性的指标研究内容有很多,这里仅选择最基本的稳态回转试验、角跃阶输入和转向回正性试验。
3.1稳态回转试验
稳态回转试验用以测定汽车对转向盘输入达到稳定行驶状态时汽车的稳态横摆响应。依照国家标准有关规定,评价指标包括中性转向点的侧向加速度值an、不足转向度U以及车身侧倾度Kφ。
根据GB/T6323.6—94补充件规定,采用定转弯半径法进行稳态回转测试。汽车以最低稳定车速行驶,调正转向盘转角,沿半径为30米的圆弧行驶。在进入圆弧路径并达到稳定状态后,保持油门和转向盘位置在3s内不动开始记录。然后增加车速,但侧向加速度增量每次不大于0.5m/s2(在所测数据急剧变化时增量可更小)。重复上述试验,直至做到侧向加速度达到6.5m/s2,或达到汽车本身所限制的最大侧向加速度为止。依据已知条件编写驾驶员文件,进行仿真。
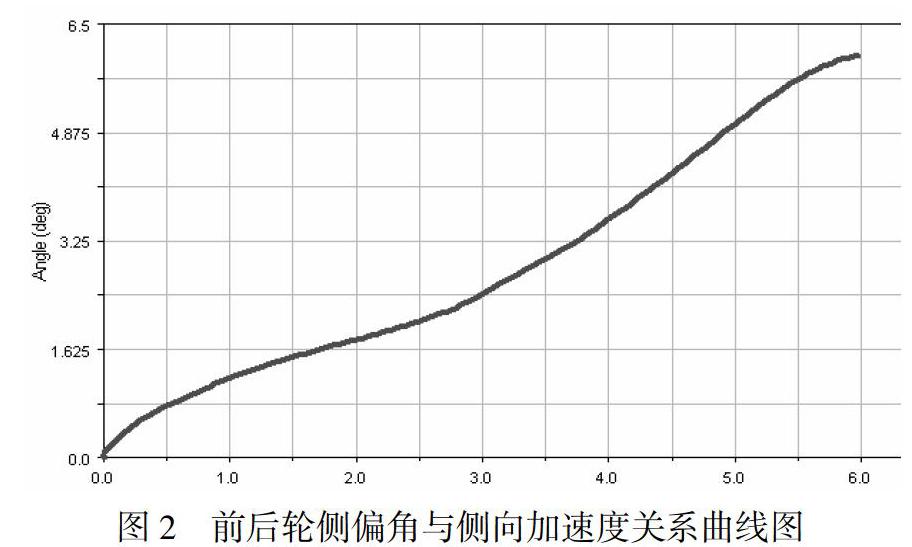
汽车前后轮侧偏角绝对值(δ1-δ2)与侧向加速度ay的关系如图2所示。
由图2可知中性转向点的侧向加速度an为6.0m/s2,在5m/s2~9.8m/s2之间,有较好的稳定性。汽车前后轮侧偏角绝对值(δ1-δ2)>0,所以此车为不足转向。不足转向度U按前、后桥侧偏角差值与侧向加速度关系曲线上侧向加速度值为2m/s2处的平均斜率(纵坐标值除以横坐标值)计算。则U=0.886°/(m/s2),在0.4~1之间,符合标准规定,整车有较好的行驶稳定性。另外车厢侧倾角φ与侧向加速度ay的曲线如图3所示。
车厢侧倾刚度Kφ,按车厢侧倾角与侧向加速度关系曲线上加速度为2m/s2处的平均斜率(纵坐标除以横坐标值)计算。可得Kφ=0.73°/(m/s2),在0.7~1.2之间,横摆响应稳定,验证了所建模型的正确性。
3.2角跃阶输入试验
前轮角跃阶输入试验用以评价汽车转向的整车随动性和反应灵敏度,响应时间越短说明整车随动性及转向灵敏性好。
按照GB/T 6323.2—94规定,汽车以试验车速直线行驶,先按输入方向轻轻靠紧转向盘,消除转向盘自由行程并开始记录各测量变量的零线,经过0.2~0.5s,以尽快的速度(起跃时间不大于0.2s或起跃速度不低于200°/s)转动转向盘,使其达到预先选好的位置并固定数秒钟。评价标准为汽车横摆角速度响应时间τ。
汽车横摆角速度随时间变化曲线如图4。横摆角速度响应时间τ=0.19s,在0.02s~0.2s允许范围内,说明此车有良好的瞬态响应特性和反应灵敏等特点。
3.3转向回正性试验
转向回正试验的实质是一种力阶跃输入试验,包括低速与高速转向回正,评价指标包括残余横摆角速度、横摆角速度超调量和稳定时间。
根据国标规定,低速回转时汽车沿半径为15±1m的圆周行驶,调整车速,使侧向加速度达到4±0.2m/s2,固定转向盘转角,稳定车速并开始记录。待3s后,驾驶员突然松开转向盘,记录松手后至少4s的运动情况。
对于最高车速超过100km/h的汽车,要进行高速回转试验,汽车以最高车速的70%行驶,使侧向加速度达到2±0.2m/s2,待稳定3s后,突然松手,记录4s后的汽车运动情况。低速回转试验车速为40km/h与80km/h横摆角速度随时间变化曲线如图5和图6所示。
从图5和图6可知低速回正时稳定时间为3.8s,横摆角速度超调量为21.8%,残余横摆角速度为0.0553°/s;高速回转时稳定时间为4.5s,横摆角速度超调量为19.9%,残余横摆角速度为0.0535°/s。横摆角速度响应速度和超调量仿真结果良好符合要求。
4.结论及展望
通过建立某轿车整车ADAMS模型进行了稳态回转试验、角跃阶输入和转向回正性试验三个操纵稳定性仿真计算,仿真结果表明该车的稳态、瞬态响应以及回正性能符合国家标准规定,操纵稳定性良好。后续可以考虑建立包括制动系、传动轴、变速器、驱动桥总成在内的整车模型,力争更加贴近实际情况,实现更多方面的性能仿真。
参考文献
[1] 余志生,夏群生.汽车理论[M].北京:机械工业出版社,2009.
[2] 张越今.汽车多体动力学及计算机仿真[M]. 吉林:吉林科学技术出版社,1998.
[3] 李军,邢俊文,覃文洁.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
基金项目:湖北文理学院博士科研基金资助项目(2015B003)。第一作者,梅雪晴,博士,讲师,研究方向:车辆系统动力学与控制、汽车可靠性工程
