基于嵌入式设备与深度学习模型的智能小车的设计与研究
2020-08-04耿韶光
耿韶光
摘要:近年来,深度学习凭借其在识别应用中超高的预测准确率,在图像处理领域获得了极大关注,这势必提升现有图像处理系统的性能并开创新的应用领域。本文在充分研究深度学习常用模型和技术框架等最新热点前提下,基于树莓派、Arduino这两种嵌入式设备,设计了一款实现物体识别与追踪的智能小车机器人。该智能小车通过搭载在智能小车上的摄像头采集数据,利用计算机视觉的目标识別与追踪模型计算出被跟踪物体的位置信息,在目标物体移动的过程中,通过嵌入式设备分析位置数据计算出控制命令来操控智能小车实现目标跟踪。
关键词:树莓派;Arduino;深度学习;目标跟踪
中图分类号:TP23 文献标识码:A 文章编号:1007-9416(2020)05-0161-02
0引言
视频目标跟踪是计算机视觉领域的重要研究方向之一,它在智能视频监控、人机交互等领域有广泛应用。随着深度学习方法的发展,视频目标跟踪变得越来越精准。树莓派是一款具备高级功能的嵌入式主板,Arduino是一款便捷的嵌入式开发工具,可做实时信号采集和控制。然而树莓派硬件扩展能力差,Arduino没有强大的处理能力。当二者结合起来使用时,各自的特性便具有互补性。本文中的智能小车利用深度神经网络模型计算出被跟踪物体的位置信息,用树莓派与Arduino控制小车跟随目标物体的移动而运动。
1智能小车总体架构设计
具体来讲系统分为移动小车、图像采集模块,数据计算模块、逻辑总控模块、机械总控模块这5个部分构成。
移动小车是智能小车中最为基础的组成结构,它相当于人的身体双脚。图像采集模块相当于人体的视觉系统,利用小车上的摄像头采负责集信息,这部分选用树莓派广角摄像头。数据计算模块相当于辅助人脑决策的计算设备,负责深度模型训练与分析,该模块选用高性能计算机。逻辑总控模块相当于人的大脑,将模型分析的结果转化为控制信号,该模块选用树莓派。机械总控模块相当于人的运行神经,以驱动小车的电机和舵机改变速度或转向,最终实现对目标的识别与跟踪功能,该模块选用Arduino。
2基于深度学习的视频目标识别与跟踪
2.1目标检测
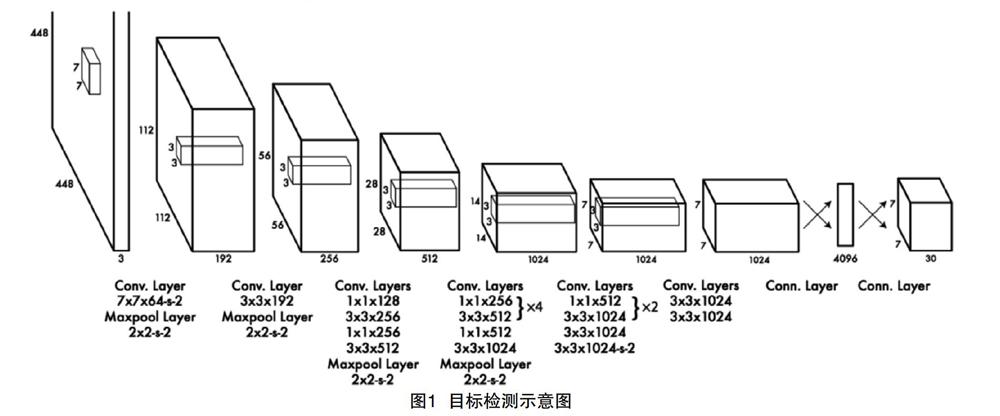
本系统主要研究的是单目标检测,即只针对某一指定物体进行检测处理,本次实验将普通乒乓球作为目标物。选取的深度算法为目前非常流行的目标检测算-Yolo。Yolo的输入是包含目标物体的图片,输出是目标物及可信度得分。如图1所示,Yolo采用卷积网络来提取特征,然后使用全连接层来得到预测值。
在使用Yolo算法之前,首先需要获得目标物体的数据集。数据集既可以在已公开数据集中寻找,也可以自行制作。自行制作的方法是通过opencvN用摄像头拍摄目标物。使用labelimg数据集标注工具标注目标对象,再生成标注信息文本文件。
2.2距离检测
本系统不需要获取车体与目标物之间的精确距离,我们采用了估算方法。用矩形框将识别出视频中的目标物标注出来,当摄像头与目标物距离发生变化时候,矩形框的大小也随之发生变化。目标物距离摄像头越远,矩形框面积变小,反之,矩形框面积变大。
2.3目标跟踪
目标跟踪是在分析目标检测结果之上,根据位置信息自动控制调整智能小车的运动,使其能跟踪目。为持续稳定的跟踪目标,规定智能小车与目标物体的距离为0.2米。其算法是:当目标在智能小车的前方约0.2m时,使用树莓派获取目标框面Nsl和位置(X,y),考虑到行进过程中的多种干扰因素,当目标框面积在(s1+sO,s1-s0)的范围内,位置在(x-X0,y-y0)与(X+XO,y+yO)的范围内,认为目标没有移动。一旦超出这个范围,树莓派要根据目标位置信息计算出小车的运动数据,并向Arduino发送控制信号,控制小车与目标物终保持O.2米的距离。
3结语
本文在对基于深度学习的目标识别与跟踪的理论研究基础上,设计了一个目标追踪智能小车系统,可以实现针对单个特定目标进行智能跟踪。在测试环境下该智能小车能很好地自动跟踪特定目标,达到了预期效果。但本文算法在光线不足和遮挡的问题上表现效果一般,此外还需借助高性能计算机来计算目标位置数据,下一步的研究重点是简化智能小车结构,选取更加适应视觉跟踪任务的深度神经网络。
