基于同步带传动的高位袋装码垛机设计
2020-07-03张建强刘智鹏
张建强 陈 星 刘智鹏
(华南理工大学广州学院机械工程学院,广东 广州 510800)
目前仓库码垛袋装货物常采用人工码垛或码垛机械人进行码垛,人工码垛存在劳动强度大,效率低问题,而品牌众多的码垛机器人(日本FANUTC、安川,德国的KUKA,美国的Boston Dynamics,以及瑞士的ABB)普遍存在单价过高、维修成本高、维修周期长等问题,这些码垛机器人在中国企业应用较少。
高位袋装码垛机是自动化立体仓库的重要组成部分,通常为了节约储存空间,码垛机能够以其自动化且能够实现对袋装物料的规则堆码,实现合理摆盘,符合行业生产需要,降低了自动化成本,让大中小企业都能更好地享受低成本、高速和稳定的自动化码垛。研究拟以袋装物料装盘码垛为例,设计一种基于同步带传动的高位袋装码垛机,在满足企业生产作业需求的同时,高位袋装码垛机还具有造价相对较低、码垛速度快、稳定性高等特点,能大程度上节省人力,也能降低企业生产成本。
1 物料、托盘介绍及码垛要求
1.1 托盘和袋装物料的尺寸和重量
应用在该款码垛机的托盘尺寸为1 500 mm×1 300 mm×140 mm,托盘的单个重量为40 kg,托盘的宽度方向有两个贯通的开槽方便叉车进行货物运输。托盘尺寸示意见图1。

图1 托盘尺寸图
袋装物料选用的尺寸约为750 mm×550 mm×150 mm,单包物料重量约为40 kg。
1.2 袋装物料的码垛要求
码垛搬运行业对袋装物料的码垛排放的形状是有特定的要求[1],在行业当中通常使用以下4种垛型:平齐式码放、正反交错码放、旋转交错码放、纵横交错码放。
1.2.1 平齐式码放 货物在托盘上朝着一个方向并排并列从最底层码放到最顶层的形式,如图2所示。其特点是摆放形式整齐,货物的4个边角对齐,承受载荷大,但会由于货物层与层之间无法啮合,使得货物之间失去对应关系,容易引起垛型分离,牢固性变差。

图2 重叠式码放示意图
1.2.2 一正一反分割码放 同层不同行的货物一正一反地分列码放,层与层之间货物反向堆放,如图3所示。其特点是上、下层之间各呈方向咬合,强度高,稳定性较强。但由于4个边角不能一一对应,在托盘上无法达到平衡重量,削弱了托盘承重能力。

图3 正反交错码放示意图
1.2.3 回旋首尾交接码放 此方式每层货物均呈风车型,层与层之间货物一一对应堆叠,互相咬合交叉,如图4所示。其特点是货物在托盘上码放稳定性高,层与层之间的交叉呈正方形垛,货垛更加牢固,但增加了码放难度,且由于中间存在空位,造成托盘装载能力下降。
1.2.4 横竖交替码放 此方式是将托盘上层与下层之间货物摆放呈90°角堆放,即一层横向放置,一层纵向放置,
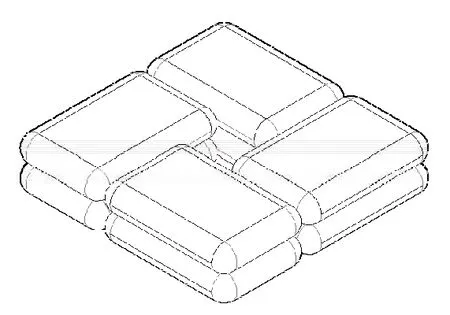
图4 旋转交错码放示意图
如图5所示。其特点是适合码放呈正方形货垛,货物之间的相互交错增加了摩擦力和咬合力,层与层之间联系密切,增加货垛牢固性。

图5 纵横交错码放示意图
该款码垛机额定工作效率为≥400袋/h,码垛层数8~10层,垛型要求牢固、定量、整齐、以及方便堆放和运输。同时对于码放的形状有着咬合强度高和稳定性强的要求,同时根据行业的一般标准,选择正反交错码放的垛型[2]。
2 高位袋装码垛机方案设计
2.1 码垛机功能确定总体模型
该款码垛机具有的主要功能为:托盘储存功能、货物抬升功能、托盘自动进给功能、托盘抬升功能、货物自动码放功能[3]。
2.1.1 托盘存储功能 码垛机是全自动的码垛设备,需要具有将托盘存储的功能缩短人工干预的周期,提高码垛机的生产效率。
2.1.2 货物抬升功能 该款码垛机为高位码垛机,货物的编码高度必须大于最大的层数高度,利用重力的作用将货物逐层堆垛。
2.1.3 托盘自动进给功能 根据自动化设备的要求,需要托盘从存储区到工作区实现自动转移和定位。
2.1.4 托盘抬升功能 由于货物是在固定的高度经过重力作用最终完成码放的,这就要求货物下降的高度不能太高而且是固定不变的,以达到质量统一的标准。因此托盘需要抬升的高度必须随着工作过程不断变化。
2.1.5 货物自动码放功能 这是码垛机的核心功能,试验选择的垛型为正反交错码放,货物需要有90°的旋转,因此该功能要实现货物在预定地点和预定姿态投放。
2.2 码垛机模块化处理
机械设计中的模块化应用是现代机械设计当中最常见和最广泛的设计方法[4]。在码垛机的整体设计中应用模块化设计方法,其第一步即对码垛机各模块进行科学划分,在划分好模块后需要确定模块的具体功能,普通的模块功能都比较单一,但有些模块需具备多种功能来满足现实使用的需求。同时在组装过程中应确保模块的完整性和独立性,因而在后期的保养和维修过程中能够及时更换,保证生产节拍和生产效率。最终根据市场调研和对码垛机功能和结构进行分析,完成划分模块的检验。
根据上述内容,码垛机可以大致的分为托盘储存模块、托盘抬升模块、3轴移动平台编码模块、送料模块、输送带模块。码垛机的整体示意图如图6所示。
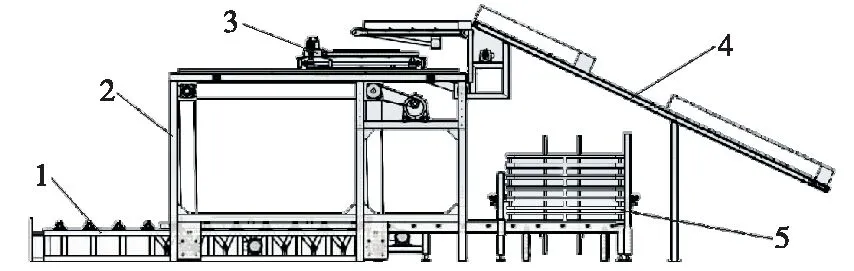
1. 送料模块 2. 托盘抬升模块 3. 3轴移动平台编码模块 4. 输送带模块 5. 托盘储存模块
图6 码垛机整体示意图
Figure 6 Overall sketch of palletizer
3 堆叠机构的设计
堆叠机构核心组成部分是3轴移动平台编码模块,该模块主要是依靠伺服电机驱动同步带传动在X轴、Y轴上平移以及Z轴的90°旋转,其中X轴的导轨安装在托盘抬升模块的码垛机机架顶部,如图7所示。

1. 伺服电机 2. 沿Y轴移动同步带 3. 沿X轴移动同步带
Figure 7 Schematic diagram of the coding module of the three-axis mobile platform as a whole
货物由输送带和平台的同速运动过程中,从输送带的末端转移到3轴移动平台上,平台在PLC的控制下将指定的货物运送至指定的位置后,由气缸将合页打开,货物经重力的作用完成码垛。为了保证码垛的精度和编程的方便性,采用伺服电机作为动力来源[5]。
3.1 X、Y轴传动机构分析
在X、Y轴上采用同步带传动,同步带传动是一种啮合型的带传动[6]。同步带的内表面等距分布着横向齿和同步带轮的齿槽相对应,通过两齿之间的啮合来传递运动。该种传动方式没有传统带传动的相对滑动,能够保证传动比。
同步带的本体是聚氨酯或氯丁橡胶,具有弹性,同步带的负载层采用的是伸缩率很小的钢丝或者玻璃纤维压铸成型,在同步带工作时受到拉力和应力作用的伸缩率非常小,保证了同步带的节距保持不变,使得同步带和带轮能够正常啮合获得准确的传动比。
码垛机的3轴移动平台中X和Y轴的传动,通过同步带与移动平台的固定来实现,将电机的旋转运动转化为直线运动,如图8所示,固定板的作用是将同步带和平台实现连接起来。
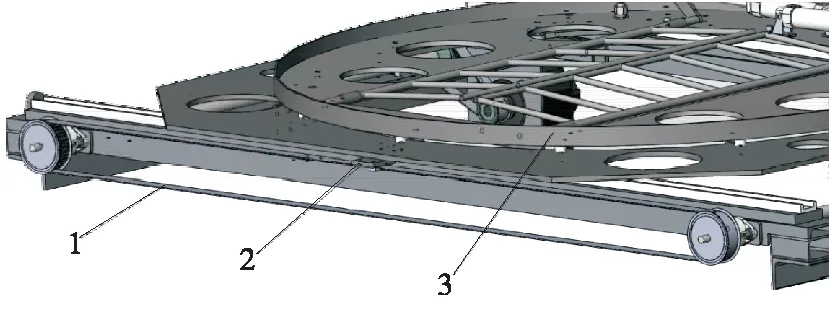
1. 传送带 2. 固定块 3. 转盘
3.2 绕Z轴旋转平台设计
3轴移动平台的第3轴为绕Z轴旋转90°的旋转轴,根据垛型的要求货物需要有交错90°的码放位置。由于平台需要将货物旋转后放下,所以3轴移动平台最上层的圆盘必须整体旋转,但会导致需要旋转的圆盘面积较大。圆盘的旋转传动的方式最终锁定在齿轮传动和同步带传动中,进行二选一。
齿轮传动的方案需要将齿条安装在圆盘上,或者将圆盘进行激光切割,在圆盘的边缘制成齿轮模样,在这个方案当中圆盘的加工费用高昂。
同步带传动方案中,电机直接连接同步带轮,将同步带剪断,同步带的两端用螺丝固定在圆盘上,并将同步带绕过电机的同步带轮。利用同步带和圆盘相对静止,电机带动同步带来实现圆盘的旋转运动[7]。同步带的布局简图如图9所示。

1. 同步带 2. 球阀气缸 3. 圆管门
4 高位码垛机上同步带轮选型分析
同步带轮传动是靠同步带齿与同步带轮齿之间的啮合实现传动,两者无相对滑动,而使圆周速度同步,故称为同步带传动。在堆叠机构中,同步带在伺服电机带动下长距离的传动过程也能具有比较高的精度,比较低廉的成本,综上所述码垛机的3轴移动平台的传动结构选择同步带传动。如图9所示,设计中所用同步带轮所处的位置在可移动转盘,可移动转盘两个动作需要使用到同步带轮,即转盘对物料的旋转摆放及水平输送,从而实现在堆垛板对物料进行自动规则堆叠。因此,在可移动转盘上实现这两个动作进行运动计算分析,根据运动所需条件进行同步带轮选型[8]。
4.1 绕Z轴方向旋转的同步带及带轮选型计算
旋转方向设计要求:带动物料需要力196 N,转盘直径1.45 m,转动半圈需要同步带轮持续工作1 s。
(1) 设计功率:按式(1)计算。
Pd=KA×P,
(1)
式中:
Pd——设计功率,kW;
KA——载荷修正系数;
P——传递功率的功率,kW。
传递功率的功率按式(2)计算。
(2)
式中:
P——传递功率的功率,kW;
F——带动物料需要力,N;
v——速度,m/s;
η——工作效率。
根据式(2)求得:P=0.32 kW。同步带普通每天使用8~10 h,查表取载荷修正系数KA=1.9,根据式(1)求得:Pd=0.6 kW。
(2) 带型选择:根据式(1)求得的结果和带轮转速n=30 r/min,查表优选8M圆弧齿同步带轮。
(3) 带轮齿数z及节圆直径d1:根据带速v和安装尺寸允许,查表选择同步带轮齿数z=22,节距pb=8 mm。根据式(3)求得节圆直径d1=56 mm。
(3)
式中:
d1——节圆直径,mm;
z——同步带轮齿数;
pb——节距,mm。
(4) 带速v:根据式(4)求得带速v=0.087 m/s。
(4)
式中:
v——速度,m/s;
d1——节圆直径,mm;
n——转速,r/min。
(5) 基准额定功率P0:由z=22,d1=56 mm,n=30 r/min查表得P0=0.07 kW。
(6) 带宽bS:啮合修正系数KZ查表可取1.0,带长修正系数KL查表可取1.02,基准带宽bS0=20 mm。根据式(5)求得bS≥33.17 mm。
(5)
式中:
bS——带宽,mm;
bS0——基准带宽,mm;
Pd——设计功率,kW;
KL——带长修正系数;
KZ——啮合修正系数;
P0——基准额定功率,kW。
因此选定旋转方向同步带轮:带轮型8M圆弧齿同步带轮,节圆直径56 mm,齿数22,带轮总宽33.17 mm。
4.2 水平同步带及带轮选型计算
水平方向设计要求:带动物料移动需要力100 N,向前2 m所需时间2 s。
(1) 设计功率:根据式(2)求得P=111.11 W。根据每天工作16 h的工作情况,查表取载荷修正系数KA=1.9,根据式(1)求得设计功率Pd=211.11 W。
(2) 带型选择:根据Pd=211.11 W和带轮转速n=100 r/min,查表可选5M圆弧齿同步带轮。
(3) 带轮齿数z及节圆直径d1:根据带速v和安装尺寸允许,z尽可能选择较大值,通过查表选择,齿数z=20,节距pb=5 mm,根据式(3)求得,节圆直径d1=31.83 mm。
(4) 带速v:根据式(4)得带速v=0.17 m/s。
(5) 基准额定功率P0:由z=40,d1=31.83 mm,n=100 r/min查表得P0=0.035 kW。
(6) 带宽bS:啮合修正系数KZ查表可取1.0,带长修正系数KL查表可取1.02,基准带宽bS0=9 mm。根据式(5)得bS≥9.20 mm。
因此选定旋转方向同步带轮:带轮型5M圆弧齿同步带轮,节圆直径63.66 mm,齿数20,带轮总宽9.20 mm。
5 主轴的有限元分析
码垛机的主轴是整个系统当中最主要的承重结构,利用SolidWorks Simulation对托盘抬升模块的主轴进行静应力及有限元分析[9]。SolidWorks在具有非常完善的零件建模功能之外,还有同样方便设计师的零件装配功能。在使用SolidWorks的装配模块时可以对零部件进行关联的设计修改。装配体的运动可以通过配合关系来实现,在软件当中能够进行运动仿真进而对零部件的运动过程中可以完成动态的零部件干涉检测和间隙检测。托盘提升模块的模型就是一个比较大装配体,如图10所示,在该装配体当中托盘架在机架当中上下运动,在托盘运动的上下限位能够直观地看出托盘是否具有干涉现象。

1. 托盘架 2. 机架 3. 主轴 4. 电机
5.1 前处理
(1) 将机架导入SolidWorks Simulation模块中,新建算例静应力并添加上述参数,结果如图11所示。

图11 新建算例
(2) 设置主轴的材料。材料为45#钢,45#钢的物理属性如图12所示,弹性模量为2.09×1011N/m2,泊松比为0.269,中抗剪模量8.23×1010N/m2,屈服强度355 MPa,热膨胀系数为1.17×10-5K。
(3) 固定主轴。主轴是由两个固定在码垛机的机架上的球面轴承固定,主轴固定的位置如图13所示。
(4) 确定外部载荷。主轴的载荷由两部分组成,扭矩和径向压力,其中扭矩为工作扭矩1 496.55 N·m,径向压力为1 494 617 N/m2,作用的位置如图14所示[10]。
(5) 网格划分。在SolidWorks Simulation中具有非常强大的自适应网格划分功能,并且可以微调网格的大小和类型如图15所示。
5.2 码垛机主轴有限元分析
在静应力分析的算例当中,计算出结果包括了应力、位移和应变[11]。如图16所示,最小应力为1.940×103N/m2,最大应力为1.227×108N/m2。根据有限元分析得到,码垛机主轴的设计是符合要求的,对于轴承受的弯矩过大时会出现的断裂现象,可以将轴承支撑的位置尽量靠近径向压力的作用位置上。

图12 45#钢的物理属性

图13 主轴夹具设置
Figure 13 Spindle fixture settings

图14 外部载荷示意图

图15 主轴网格划分
Figure 15 Dividing spindle mesh
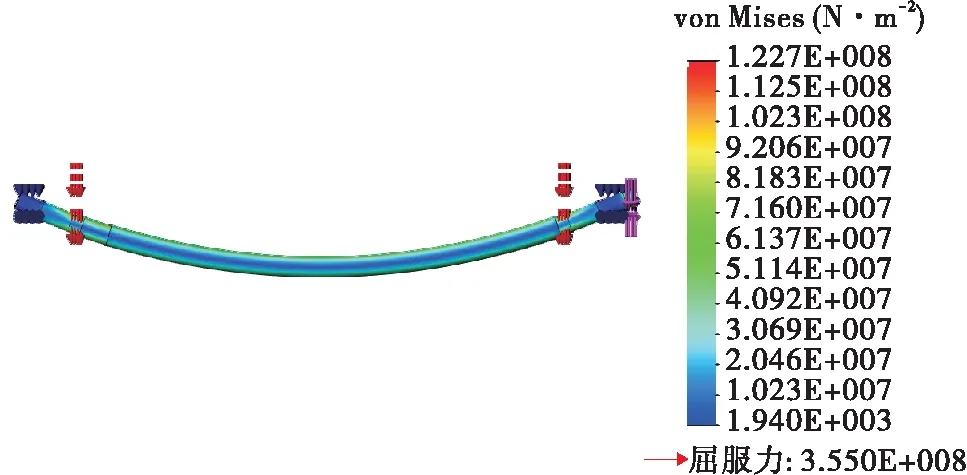
图16 主轴有限元分析结果
6 结论
(1) 试验设计的袋装码垛机依靠堆叠机构以同步带传动的方式按照场合要求逐层堆叠码放袋装物料,这种传动方式由伺服电机驱动,通过模块化设计为袋装物料的码垛提供一种可以实现自动堆垛且能根据袋装物料形状的不同来合理调整摆放位置,能够满足码垛行业的实际生产要求,轻松实现码垛的各种跺型需求。
(2) 设计仍然有一些不足,例如整机设计的重量较大,对于产能小的企业仓库并不适用。但在机构设计方面考虑了其在自动立体仓库的实用性价值,以及码垛机的应用方法当中,依靠高位袋装自动堆垛的方法解决袋装物料分类码垛问题。
