某型飞机内埋式武器弹射系统优化研究*
2018-08-27汤军社赵博锋
杨 海,汤军社,赵博锋
(西北工业大学机电学院,西安 710000)
0 引言
内埋式武器弹射装置是隐身作战飞机内埋式弹舱结构的重要组成部分,是空基武器的重要发射平台。弹射装置多采用液压作动器,体积小、重量轻、动作灵敏、作用力大、易于自动化控制,可与载机液压系统一体化设计[1-2]。图1为F-22A采用的液压导弹垂直弹射架,全重仅52 kg,能在0.1 s内完成伸展动作,产生40g的峰值加速度和8 m/s的分离速度,保证导弹安全发射[3]。
1 弹射机构工作原理
武器内埋式装载在带来显著军事效益的同时也引发一些问题:不同型号武器挂载在弹射机构上时,弹射机构的质心会有所变化;在武器舱门打开、投放武器瞬间会受到空间流场强烈的动态冲击载荷等。这些因素会使武器在投放过程中产生较大俯仰角偏差,武器在点火发射后就有可能发生机/弹相互碰撞,造成严重事故[4-6]。
为了控制弹射过程中武器俯仰角偏差,确保武器分离的安全,某型作战飞机在弹射装置中设置了同步机构。弹射机构原理如图2所示,15为载机上壳体;16为下壳体,与导弹连接;杆1、3为上转臂;杆2、4为下转臂;杆5、7为上连扳;杆6、8为下连扳;杆9、10为同步杆;杆5与杆11固连,杆6与杆12固连,杆7与杆13固连,杆8与杆14固连。机构由M、N之间的液压作动器驱动。
在投放武器前,液压作动筒处于收缩状态。当接到发射指令时,武器舱门首先打开,然后液压缸作动筒动作,驱动整个机构重心向下做加速运动。同步杆9、10的作用是保证连扳5、7及6、8的同步运动,使武器以近乎平直的姿态向下运动。当武器行程到达预定值之后,分离装置动作,武器弹射出去,运动到离载机安全距离以外后点火发射。随即收起弹射架和舱门,完成整个弹射过程。
在弹射架机构设计中要着重对同步机构进行优化设计,使同步机构运动的同步性能符合要求,确保整个弹射过程的安全。同步机构的优化是典型的非线性优化问题[7]。
2 OPTDES-SQP非线性二次规划
OPTDES-SQP算法利用了拟牛顿法来近似构造Hessian矩阵,用以建立二次规划子问题。二次规划法是通过拉格朗日函数将原问题转化为二次规划子问题,通过求解二次规划子问题就可以得到迭代的搜索方向,然后沿搜索方向进行一维搜索,找到迭代的步长,最终得到问题的最优解。
优化问题的数学模型为:
(1)
式中:X为设计变量;F(X)为目标函数;gj(X)为不等式约束条件;hk(X)为等式约束条件。
那么,式(1)对应的拉格朗日函数如下:
L(X,λ1,λ2)=F(X)+λ1gj(X)+λ2hk(X)
(2)
将式(2)在Xk点展开后的二阶泰勒近似式如下:
(3)
式中:Sk为优化问题的搜索方向;B为拟牛顿法中的变尺度矩阵。
(4)
拉格朗日函数的一阶导数如下:
(5)
对于不等式约束gj(X)≤0,将gj(X)=0在Xk点展开,得到的二阶泰勒近似式为下式:
gj(Xk+1)=gj(Xk)+(gj(Xk))TSk=0
(6)
对于等式约束hk(X)=0,将hk(X)=0在Xk点展开等式约束的二阶泰勒近似式如下:
hk(Xk+1)=hk(Xk)+(hk(Xk))TSk=0
(7)
将式(4)、式(5)、式(6)和式(7)代入式(3),就可以得到二次规划子问题表达式如下:
(8)
求解上述二次规划子问题,然后得到搜索方向S,沿搜索方向进行一维搜索,步长为αk,然后按Xk+1=Xk+αkSk的格式进行迭代,最终就能够得到问题的最优解[8-9]。
3 优化计算
3.1 模型的非线性关系
弹射装置共有4个同步杆,它们有相同的空间结构,文中选取上同步杆中的一个展开研究,如图3所示为上同步机构的机构简图。
由上图可以看出,在液压作动筒的驱动下,杆5与杆7的运动通过同步机构联系起来,因此要保证杆5与杆7的同步运动,就要保证旋转角α和δ的同步运动。旋转角α和δ的基本关系由以下方程组推导出。
根据机构水平分向的投影关系有:
l11cos(180°-α-β)+l9cosε-l15-
l13cos(γ-δ)=0
(9)
根据机构竖直方向的投影关系有:
l11sin(180°-α-β)-l9sinε+l13sin(γ-δ)=0
(10)
上面公式中l11代表杆11的长度,l9代表同步杆9的长度,剩下以此类推。α为机架与杆5之间的夹角,β为杆5与杆11之间的夹角,ε为杆9与机架之间的夹角,δ为杆7与机架的夹角,γ为杆13与杆7的夹角。在以上的变量中,假设各个杆的长度已知,角β和角γ的值固定不变,则式(9)和式(10)总共有3个变量α、ε和δ。联立式(9)和式(10)消去变量ε,得到关于α和δ的非线性方程:
f(α,δ)=0
(11)
由上式可以看出,角α和角δ是非线性关系。这说明同步机构在整个弹射过程中并不能做到真正意义上的完全同步。为了使两端最大程度的接近同步运动,就需找到使弹射过程中角α和角δ误差最小的弹射机构模型,这也是对同步机构进行优化的目的。
在ADAMS里进行建模,由于上壳体上的两个轴点C、D之间的长度是确定的,所以将C、D两点设置为固定点。由于设计的弹射系统前后对称,故有l5=l7,l11=l13,β=γ。
3.2 目标函数的确定
(12)
3.3 设计变量的选取
在同步机构的设计中,有3个未知变量:l11或l13,β或γ以及l9。在上述变量中,一旦l11和β确定,l9也会被唯一确定。所以,只需选取L=l11=l13,A=β=γ这两个未知量作为设计变量。
3.4 约束条件的确定
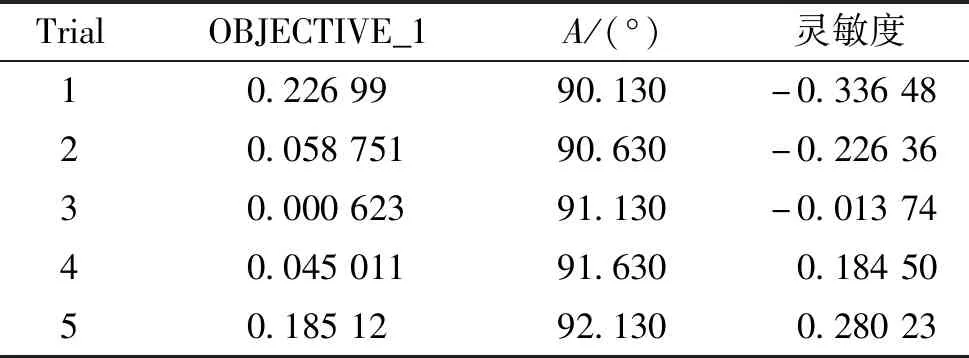
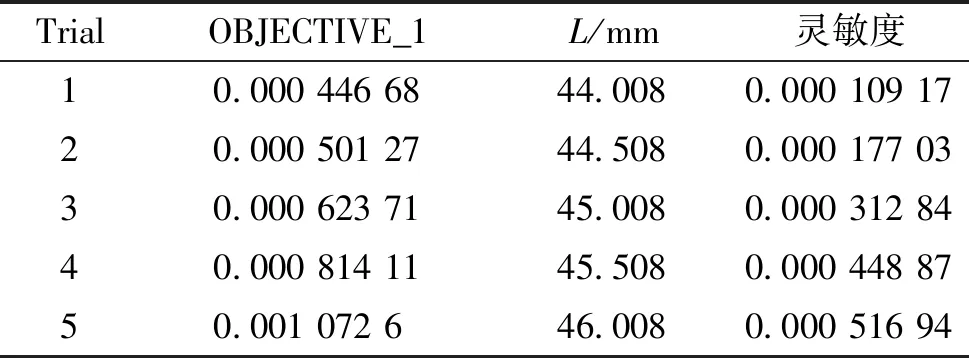
根据结构原理及以往经验,α与δ取0°~50°,β与γ取90°~120°。同时,为了提高同步杆的传动效率,减小同步杆的受力,杆11和杆13的长度也要适中,取二者长度在45 mm到60 mm之间。根据三角形的边长条件限制,杆件之间的长度还应该满足关系:l11+l13+l9>l15;l9-l11-l13 没想到,几天之后,竟然听到她去世的消息。我整个人呆掉了,一瞬间很多往事涌上来,眼泪止不住地往下掉。自那之后,只要谁说让我回电话,我都会马上打回去。 (13) 此同步机构优化是一个比较典型的约束非线性规划问题,ADAMS中集成了广义简约梯度法(GRG)以及序列二次规划法(SQP)。根据SQP算法的特点,可以应用其作为该问题的解法,在ADAMS中可以很方便的解决该同步机构优化问题。 在建立ADAMS模型时,将上壳体的两个点C、D之间的距离固定设为3 840 mm。以点C、I为端点建立连杆11,以点D、J为端点建立连杆13,并且设连杆11和连杆13的长度为变量L,设连杆11和连杆5、连杆13和连杆7之间的夹角为变量A,且为固定约束,最后再以I、J建立连杆9。机构与载机以C、D点为轴建立旋转副,以I、J点为轴建立旋转副,其样机模型如图4所示。 根据目标函数和约束条件建立以下测量函数:1)杆5和杆15的夹角α;2)杆7和杆15的夹角δ;3)杆5和杆7的摆角差即(α-δ);4)用于计算同步效果的目标函数obj1:(α-δ)2;5)cons1:l15-2L-l9;6)cons2:l9-2L-l15;7)cons3:2L+l9-l15;8)cons4:40-θ。其中测量函数5),6),7),8)均用于实现约束条件。 模型的驱动为杆5绕点C的转动,将驱动函数设为10d·t,仿真时间5 s,仿真步数50步。将杆5作为驱动,从0°到50°。选取A和L作为设计变量,选择优化方法为OPTDES_SQP,设定容差Tolerance为10-6,增量Increment为10-3,则完成了同步杆的优化模型。 经过5次迭代后,仿真结果达到了收敛精度。Lter_0为未优化的曲线,Lter_5为最终优化后的曲线。可以看出开始时两个同步角差值(α-δ)随着时间在逐步增加,Lter_0曲线显示最大达到-1.25°,但随着迭代次数的增加,同步角差值有了明显的减小,Lter_5曲线显示同步角差值是先增加后减小,在0值附近波动。 为了进一步分析优化结果,将最终优化结果曲线Lter_5单独提取出来,如图6所示,(α-δ)的值在保持在+0.03°和-0.045°之间,优化结果足以保证机构的同步性。最终优化取值β=γ=91.130°,l11=l13=45.008 mm,l9=3 839.28 mm。 由于在工作过程中各杆件不可避免的存在变形及误差等,影响机构运动的同步效果。还应研究同步机构性能对各变量改变的灵敏度。在变量A的最佳取值91.130°的基础上变化±1°,总计作5次试验研究,得到5组试验曲线。如图7所示,由上至下依次为A-1°,A-0.5°,A,A+0.5°以及A+1°的试验曲线。 由上图可以看出,A的变化对同步性能的影响较为显著,当A减小1°时,同步角的差值最大增加到1.1°;而当A增加1°时,同步角的差值则减小到-1.1°。表1显示角度A的变化对同步角的变化的灵敏度。 表1 变量A的灵敏度表 可以看出变量A在最优值91.13°处的灵敏度为-0.013 740,随着A值偏差的增大,A的灵敏度也在不断变大。 对于变量L同样在最佳取值45.008 mm的基础上变化±1 mm,如图8所示,得到(L-1) mm,(L-0.5) mm,L,(L+0.5) mm,(L+1) mm的试验曲线。随着变量L的变化,同步角的差值总体保持在±0.06 mm范围内,波动幅值较小。 表2为变量L灵敏度变化趋势,可以看出L在45.008 mm处的目标函数并不是最优值,灵敏度在实验范围内随着L的增加而增加。这说明若变量L的值减小,同步性能将会提升。但是由于L过短,则会降低同步杆的传动效率,且使杆的内力增加,因此L=45.008 mm为杆长的最优解。 表2 变量L的灵敏度表 由表1和表2知,同步杆的性能对A值的变化较为敏感,而对于L变化的敏感性则相对较低。因此,在同步机构设计及制造过程中要重点控制杆9的轴向刚度,杆11和杆13的抗弯刚度和各个连接孔的位置精度,降低因角度变化对机构同步性能带来的影响。 弹射装置在弹射过程中同步机构的同步性能取决于同步杆长度和角度的取值,并且同步性能对角度的误差更为敏感。因此,同步机构在设计、制造过程中应以控制A值误差为主,控制L值误差为辅。对于文中的同步机构,有: 1)同步机构的最优取值为:A=β=γ=91.13°,l11=l13=45.01 mm,l9=3 839.28 mm; 2)同步机构在A=91.130°处灵敏度为-0.013 740, 随着A值的增大或减小,灵敏度绝对值均增加;在L=44.01 mm处的灵敏度为0.000 109 17,随着L值增大,灵敏度绝对值增大。3.5 优化结果分析
4 灵敏度分析
5 结论
