舰空导弹拦截目标中制导律设计研究*
2018-08-27孙旭涛郭小威王志佳
孙旭涛,郭小威,王志佳
(92941部队,辽宁葫芦岛 125000)
0 引言
舰空导弹为实现超视距拦截,通常采用初制导+中制导+末制导的复合制导体制。舰空导弹在中制导段按照一定的导引律飞向目标,而采用合适的导引方法改善导弹制导性能、提高导弹命中精度是制导领域的热点和难点问题。比例导引律[1-5]因控制原理简单、计算方便、目标适应能力强等优点,在舰空导弹中制导中得到广泛应用。基于预测遭遇点法[6-8]可以大大减少目标信息依赖程度,降低被发现几率,同时可以将高速目标转换为低速目标,使得目标机动性能得到充分抑制,有利于导弹攻击拦截。文献[9]基于遭遇点状态预测的复合控制前向拦截导引律,以满足高空拦截高速机动目标,但方程解析解求解时采取了分段线性化的简化方法,同时计算方程过于繁琐,不利于高速舰空弹拦截。文献[10]提出了一种基于“当前”统计模型的预测命中点法,但该方法需要实时机动检测,限制了该方法的使用范围。文献[11]提出了基于遭遇点预测的制导方法,但该方法没有考虑目标机动情况和其它导引律对该方法的影响。
为克服以往中制导律复杂的方程求解或迭代运算,依据弹目相对几何关系及导弹中制导导引特性,设计了一种工程实用的变系数中制导律,并通过仿真验证了该制导律的有效性。
1 舰空导弹中制导律设计问题
舰空导弹中制导律设计的主要任务是让导引头获得最佳的攻击状态,保证导引头可靠截获目标,同时要求导弹在中制导段尽量节省能量和飞行时间,舰空导弹制导过程如图1所示。
图1 舰空导弹中制导框图
舰空导弹中制导律设计问题可以描述如下:对于

(1)
图2 二维比例导引原理图
图中,ON为参考基准线,目标位于T点,导弹位于M点,VM为导弹速度,VT为目标速度。

2 舰空导弹拦截目标中制导律设计
现代拦截目标正朝着高速和高机动方向发展,这给舰空导弹中制导提出了更高要求。不少文献对遭遇点预测的中制导律进行了一定的研究,但方程计算繁琐或需要复杂迭代计算,同时没有充分考虑高速对中制导律性能影响,为克服以上问题,需要设计适应性更强的中制导律。
2.1 三维比例导引模型
图3 三维比例导引原理图
在xy平面内,弹目视线角变化率计算公式如式(2)~式(5)。
(2)
(3)
(4)
(5)
在xz平面内,弹目视线角变乱率的解算涉及空间角或向量在平面上投影,较为复杂,具体计算公式如式(6)~式(9),导弹位置如式(10)。
(6)
VMsin[arctan(tanθM/cosφM)-qxz]
(7)
(8)
(9)
(10)
设时间步长dt=0.01 s,导弹初始位置xM0=20 m、yM0=20 m、zM0=20 m,导弹初始速度大小VM0=100 m/s,导弹初始速度倾角θM0=0 rad,导弹初始速度偏角φM0=π/4 rad,目标初始位置xT0=150 m、yT0=150 m、zT0=150 m,初始速度大小VT0=50 m/s,初始速度偏角φT0=π/4 rad,目标初始速度倾角θT0=π/4 rad参数下三维比例导引情况如图4所示。
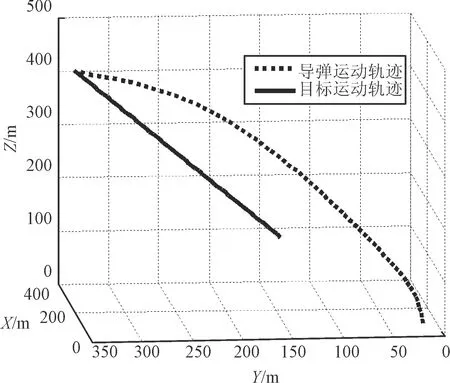
图4 三维比例导引斜飞
2.2 遭遇点预测模型
在遭遇点预测模型中导弹和目标的相对运动关系如图5所示。
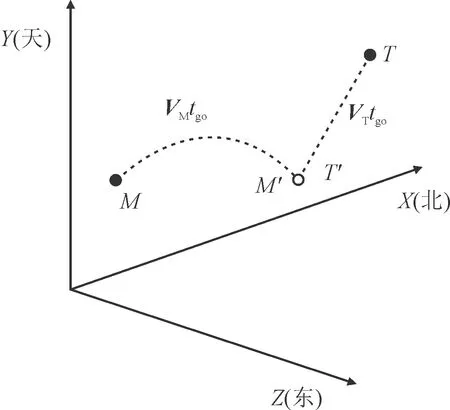
图5 遭遇点示意图
图5中M表示当前时刻的导弹位置,T表示当前时刻的目标位置,M′表示导弹飞行tgo时间后的位置,T′表示目标飞行tgo时间后的位置,M′和T′重合表示导弹与目标遭遇。

(11)
那么,M距离T′的直线距离为:
(12)
M距离T′的总航路大小为VMtgo,期望的导弹弹道趋于平直,所以认为:
‖MT′‖=VMtgo
(13)
综合式(11)~式(13),整理可得:
(14)
式中:
上式是典型的一元二次方程求解问题,下面分3种情况讨论方程的解:
1)当a=0时,tgo=-c/b;
2.3 基于预测遭遇点的变系数中制导律
基于预测遭遇点的变系数中制导律控制原理与普通三维比例导引方法的区别在于视线角变化率和比例导引系数的计算。若(xT1,yT1,zT1)表示预测遭遇点,则基准线夹角qxy和qxz的计算如式(15)。
(15)
基于预测遭遇点的变系数中制导律是一个三自由度控制律,可以解耦为xy平面和xz平面控制律,两平面内控制参数相同,为简化书写,只计算xy平面导引系数,如式(16)~式(18)。
k1xy=
(16)
k2xy=γk1xy+βxy
(17)
βxy=k2xysin(θM-qxy)
(18)
式中:k1xy为比例导引基础系数;kmin、kmax为基础比例导引系数最值;dmin、dmax为弹目临界距离;r1为导弹与预测遭遇点的距离;k2xy为中制导律实际导引系数;γ为比例导引因子,控制导引系数幅度大小;βxy为修正项。
3 仿真实验结果分析
设时间步长dt=0.01 s,导弹初始位置xM0=1 m、yM0=1 m、zM0=1 m,导弹初始速度大小VM0=400 m/s,导弹初始速度倾角θM0=π/4 rad,速度偏角φM0=π/4 rad,目标初始位置xT0=300 m、yT0=300 m、zT0=300 m,初始速度大小VT0=50 m/s,初始速度偏角φT0=-π/2 rad,速度倾角θT0=π/3 rad,取导引系数kmin=2,kmax=28,dmin=20 m、dmax=500 m,比例导引因子γ=0.28。
为验证基于预测遭遇点的变系数中制导律的优势,仿真实验依据中制导律系数是否可变和目标遭遇点是否可预测展开,不同仿真方法下目标拦截时间见表1。
表1 仿真实验结果
从表1可以看出,变系数导引律、遭遇点预测的普通导引律和遭遇点预测的变系数中制导律拦截时间均比普通导引律小,而遭遇点预测的变系数中制导律拦截时间最小,说明了此方法的有效性。
为验证导弹速度对改进制导律影响,将普通导引律、偏置导引律、修正比例导引律与改进制导律进行对比分析,以导弹速度为横轴,以拦截时间为纵轴,取目标初始位置xT0=1 200 m、yT0=1 600 m、zT0=2 000 m,导弹初始速度大小VM0为100~800 m/s,4种导引律拦截时间随导弹速度变化情况见图6。
图6 拦截时间对比图
从图6可以看出,4种导引律拦截时间均随导弹速度增大而减小,导弹速度在500~800 m/s变化时,目标拦截时间逐渐减小趋于一致。在导弹速度100~500 m/s时,基于预测遭遇点的变系数中制导律拦截时间明显小于其它3种导引律,在导弹速度为500~800 m/s时,拦截时间偏置导引律趋于一致,整体来说,设计的舰空导弹中制导律能够快速拦截目标。
4 结论
为减少目标拦截时间,避免繁琐方程和迭代计算,设计了基于预测遭遇点的变系数中制导律。文中分析了三维比例导引原理和遭遇点预测方法,结合比例导引律、偏置导引律、预测遭遇点法,提出了基于预测遭遇点的变系数改进中制导律,仿真实验结果表明该制导律目标拦截时间更短、速度响应特性更好。
