基于RLS算法的自适应波束形成性能研究*
2018-08-27冯晓宇谢军伟张昭建
冯晓宇,谢军伟,张 晶,张昭建,王 博
(1 空军工程大学防空反导学院,西安 710051;2 陕西交通职业技术学院,西安 710018)
0 引言
近年来,阵列信号处理在雷达、声纳、通信及医学成像等众多领域得到了广泛应用[1-3]。自适应波束形成是阵列信号处理的一个主要方面,并且越来越受到研究人员的重视。其实质是通过调整各阵元的权值,进行空域滤波,从而达到增强期望信号增益,抑制干扰和噪声的目的[4-5]。基于线性约束最小方差准则就是比较常用的一种算法,它通过调整权矢量,使得主波束对准期望信号,零陷对准干扰,提高了波束形成器的性能。但在实际应用中,由于存在不可避免的相位误差使假定的信号导向矢量与真实信号的导向矢量失配,降低信干噪比,自适应波束形成算法的性能大幅下降,期望信号分量会被当作干扰被抑制,甚至出现“自消”现象。
针对波束形成算法遇到的问题,为改善算法的性能,国内外许多文献提出各种稳健的自适应波束形成算法。文献[6-7]提出一种对角加载算法,它能减弱波束形成对期望信号的抑制能力,减缓“自消”现象,改善了系统的稳健性,但最优加载量的确定一直是一个问题;文献[8]提出一种最小均方算法,该算法结构简单,算法复杂度低,但收敛速度较慢;文献[9]提出一种基于可变加载约束的稳健波束形成算法,但性能提高不显著。文献[10]将RLS自适应波束形成算法与空间滑法相结合应用于相干环境中,起到了良好效果。目前许多文献都提到过RLS算法,但未对其在自适应波束形成领域的应用性能进行深入研究。文中仿真了基于RLS算法的自适应波束形成在相位误差存在下的性能,该算法采用递推法求取最优权矢量,避免了假定导向矢量与真实导向矢量失配引入误差,收敛速度快,改善了系统稳健性。通过对仿真结果分析,验证了算法的有效性。
1 信号模型
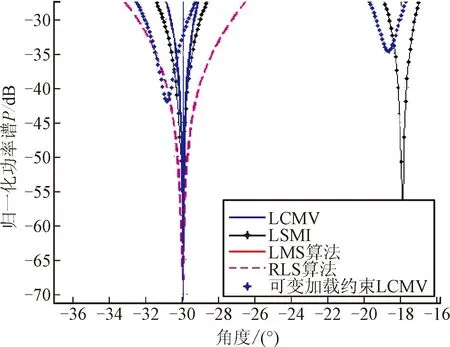
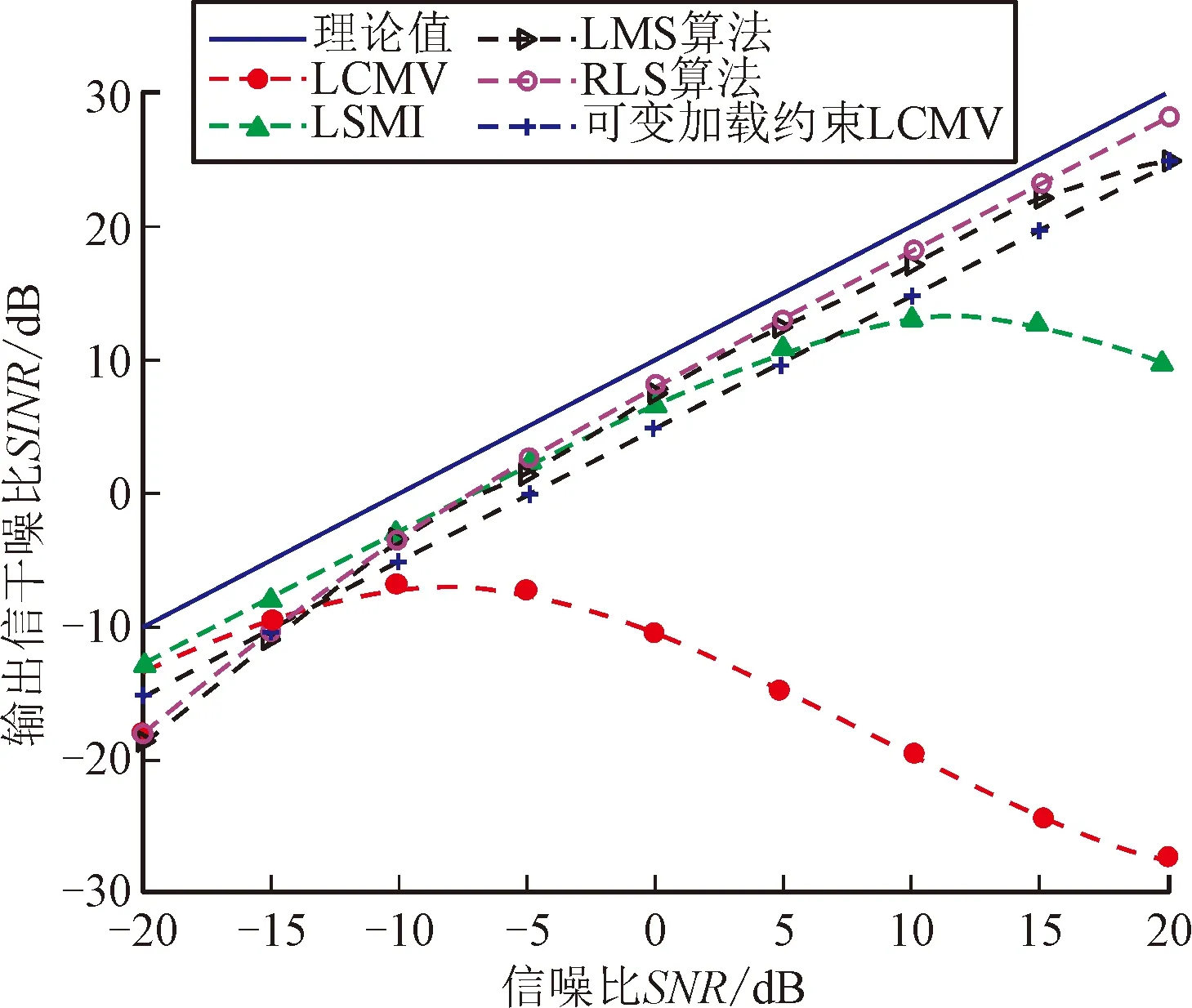
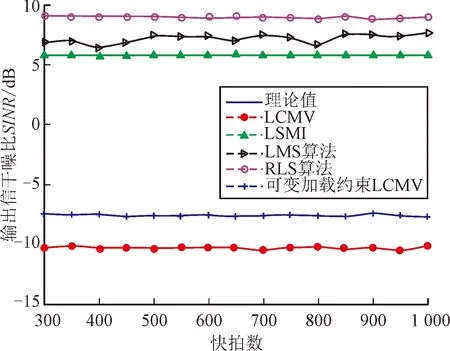
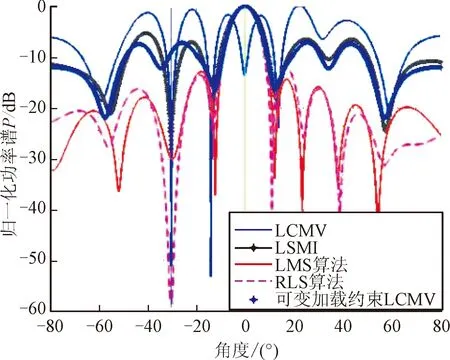
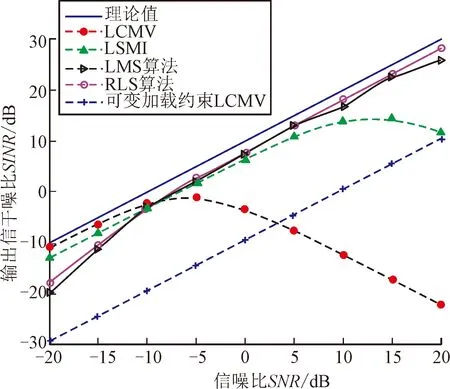
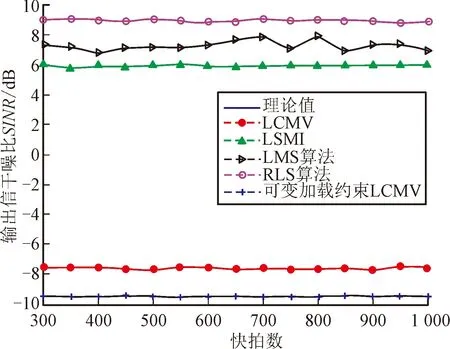
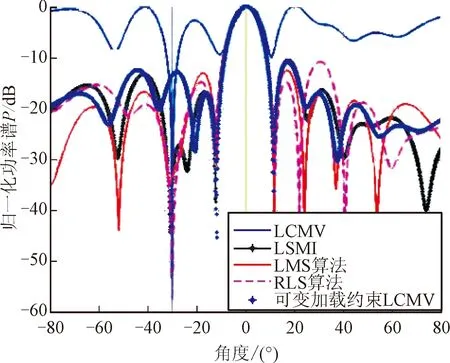
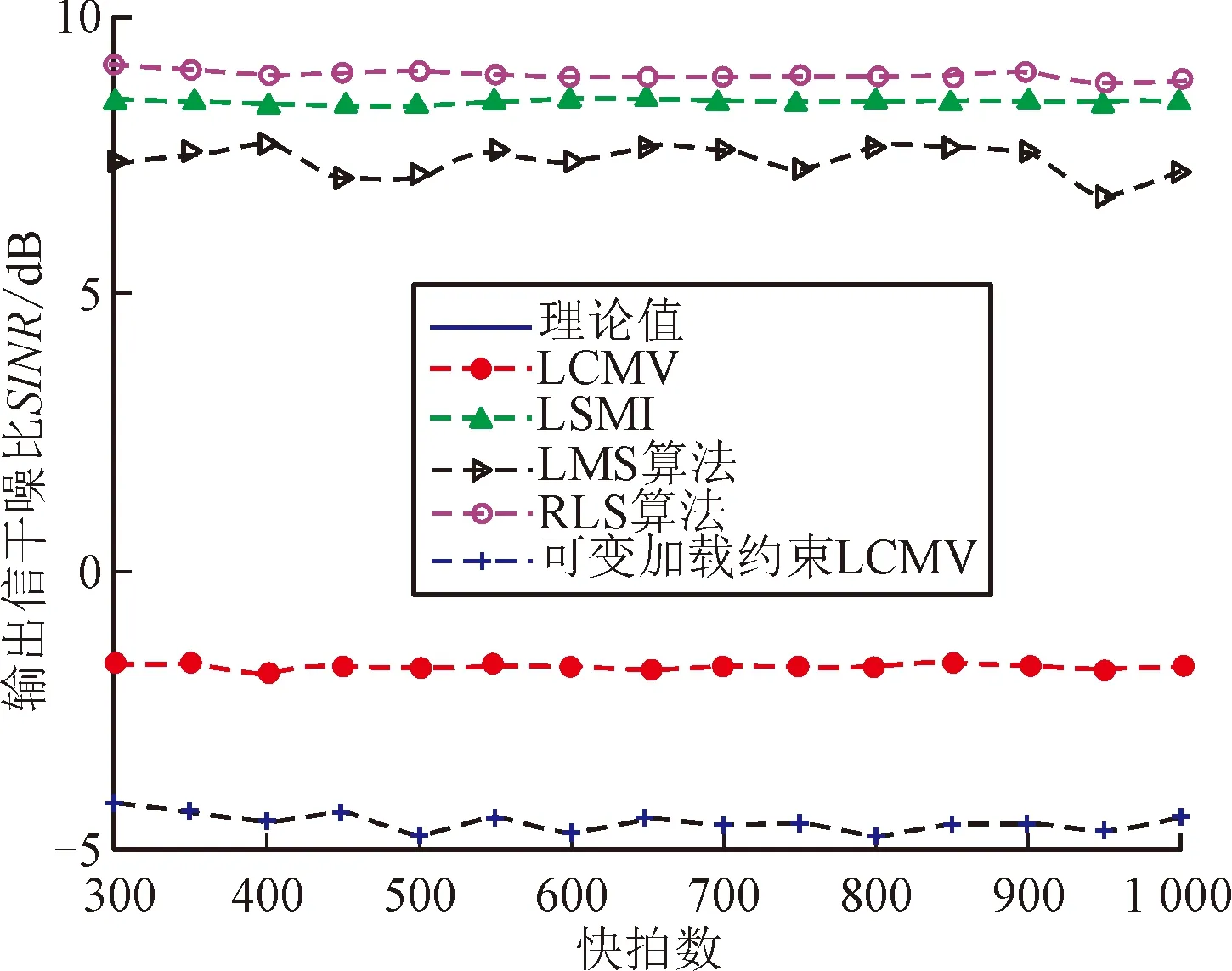
假设Q个互不相关的窄带信号入射到阵元数为M(Q 图1 均匀线阵示意图 对接收数据进行采样,则第k次采样数据表示为: (1) 式中:s0(k)表示期望信号的复包络;si(k),i=1,…,Q-1表示干扰信号的复包络;a(θi)=ai表示入射角为θi的信号导向矢量;n(k)为噪声矢量。当期望信号、干扰信号和噪声互不相关时,接收数据的协方差矩阵的理论表达式为: R=E[x(k)xH(k)] (2) R=Rs+Ri+Rn (3) 式中:Rs、Ri和Rn分别表示期望信号、干扰信号和噪声的协方差矩阵。上标H表示共轭转置。 对阵列接收数据进行加权求和,其输出可表示为: y(k)=wHx(k) (4) 式中w表示权矢量。 实际应用中,阵列接收数据的协方差矩阵是通过有限次快拍数据估计得到[11]: (5) 上式中L表示快拍数,采用基于线性约束最小方差准则(LCMV),实际上是求解如下约束问题: (6) (7) 阵列输出的信干噪比为: (8) 该算法的实现需要知道目标信号的准确导向矢量,然而由于误差的存在,假定的期望信号导向矢量往往与真实期望信号导向矢量失配,算法性能严重下降。 最小均方(least mean square,LMS)算法是一种搜索算法,通过搜索,调整权矢量,达到减小误差,逼近期望信号的目的。 由式(4)得,输出y(k)=wHx(k),期望信号为d(k),则误差信号为: e(k)=d(k)-y(k) (9) 所以,LMS算法的更新方程为: w(k+1)=w(k)+μx(k)e*(k) (10) 式中,μ为收敛因子,它的取值范围是0<μ LMS算法结构简单、易于实现,但是收敛速度较慢。基于递推最小二乘(RLS)的波束形成算法通过搜索,减小与期望信号之间的误差,最大程度增大了信号方向增益,抑制了干扰与噪声,收敛速度快。由于迭代过程不用估计信号方向,避免了引入人为估计的指向误差。其算法步骤如下: v(k)=P(k-1)x(k) (11) (12) d(k)为期望信号,则其误差信号可表示为: α(k)=d(k)-wH(k-1)x(k) (13) 递推公式为: w(k)=w(k-1)+u(k)a*(k) (14) P(k)=λ-1[I-u(k)xH(k)]P(k-1) (15) 式中:初始化w0=0,P0=δ-1I,δ为很小的常数,λ为遗忘因子,其取值为小于但接近1的数。 为了验证基于RLS算法的自适应波束形成性能,针对指向误差、阵元位置误差和相位误差进行计算机仿真,并与基于LCMV算法、对角加载算法(LSMI)、LMS算法、可变加载的稳健LCMV算法[8]比较。 仿真条件为:10阵元半波长均匀线阵,期望信号的方向为0°,干扰信号的方向为-30°,信噪比(SNR)为0 dB,干噪比(INR)为20 dB,快拍数为1 000,LMS算法中收敛因子μ=0.000 7,可变加载稳健LCMV算法中的δ1=9.965 6×10-4,μ1=0.01,对角加载算法的加载量取10,RLS算法的遗忘因子λ=0.95,噪声为高斯白噪声。以下仿真结果通过100次Monte Carlo实验得到。 首先仿真的是存在5°指向误差的情况,如图2~图5所示。从图2看出,LCMV算法在期望信号方向形成了零陷,不具稳健性;可变加载稳健LCMV与对角加载的主波束未正对信号方向,但更靠近真实期望信号方向;LMS算法虽然主波束正对期望信号,但在干扰方向形成的零陷较浅;RLS算法既使主波束对准期望信号方向,又在干扰信号方向形成较深零陷,稳健性较好。从图4看出,随着信噪比的增大,RLS算法只有约1.8 dB的损失,LMS与可变加载LCMV分别有2.6 dB和5 dB的损失,LCMV算法在信噪比为20时有58 dB损失,算法失效。从图5看出,RLS算法有1 dB损失,其他算法的损失都比RLS算法大,LCMV算法有20 dB的损失。综上,RLS在指向误差为5°时的稳健性较好。 图2 指向误差为5°时的方向图 图3 指向误差为5°时的方向图 图4 SINR与SNR的关系 图5 SINR与快拍数的关系 其次仿真的是存在0至半波长之间均匀分布的阵元位置误差情况,如图6~图8所示。从图6看出,LCMV算法不具稳健性;其他几种算法均能在信号方向形成主波束,但可变加载LCMV未在干扰方向形成零陷,对角加载算法旁瓣较高,引入了其他方向的干扰信号;LMS算法未对干扰信号进行有效抑制;RLS算法稳健性较好。从图7、图8看出,可变加载LCMV在阵元位置误差下,性能恶化;LSMI算法在阵元位置误差情况下,一定程度上改善了基于LCMV算法的性能,但随着信噪比的升高,性能呈下降趋势;RLS算法在阵元位置误差情况下性能稳定。 图6 存在阵元位置误差时的方向图 最后仿真了各阵元存在随机相位误差的情况,假设随机相位误差服从(0~2π)上的均匀分布,如图9~图11所示。从图9可以看出,LCMV算法在存在随机相位时旁瓣增高,主瓣发生畸变;其他几种算法均能在信号方向形成主波束,但可变加载LCMV算法未能在干扰方向形成零陷,RLS算法在干扰方向形成较深零陷。从图10、图11看出,RLS算法在存在随机相位误差情况下,仍能保持较大输出信干噪比,而其他几种算法的损失值较大,可变加载LCMV的损失值达18 dB,算法基本性能严重下降。 图7 SINR与SNR的关系 图8 SINR与快拍数的关系 图9 存在随机相位误差时的方向图 图10 SINR与SNR的关系 图11 SINR与快拍数的关系 在以上3种误差情况下的仿真中,基于RLS算法的波束形成性能较好,能够最大程度的保证主波束对准信号方向,提高信号增益,抑制干扰与噪声。 文中针对传统波束形成算法在相位误差存在情况下性能下降问题,仿真验证了基于RLS的波束形成算法在相位误差存在下的有效性。该算法采用递推求取最优权矢量,避免了人为估计引入指向误差,具有良好稳健性。但该算法存在计算量大,递推必须积累足够多的快拍数的缺点,下一步将对此展开研究。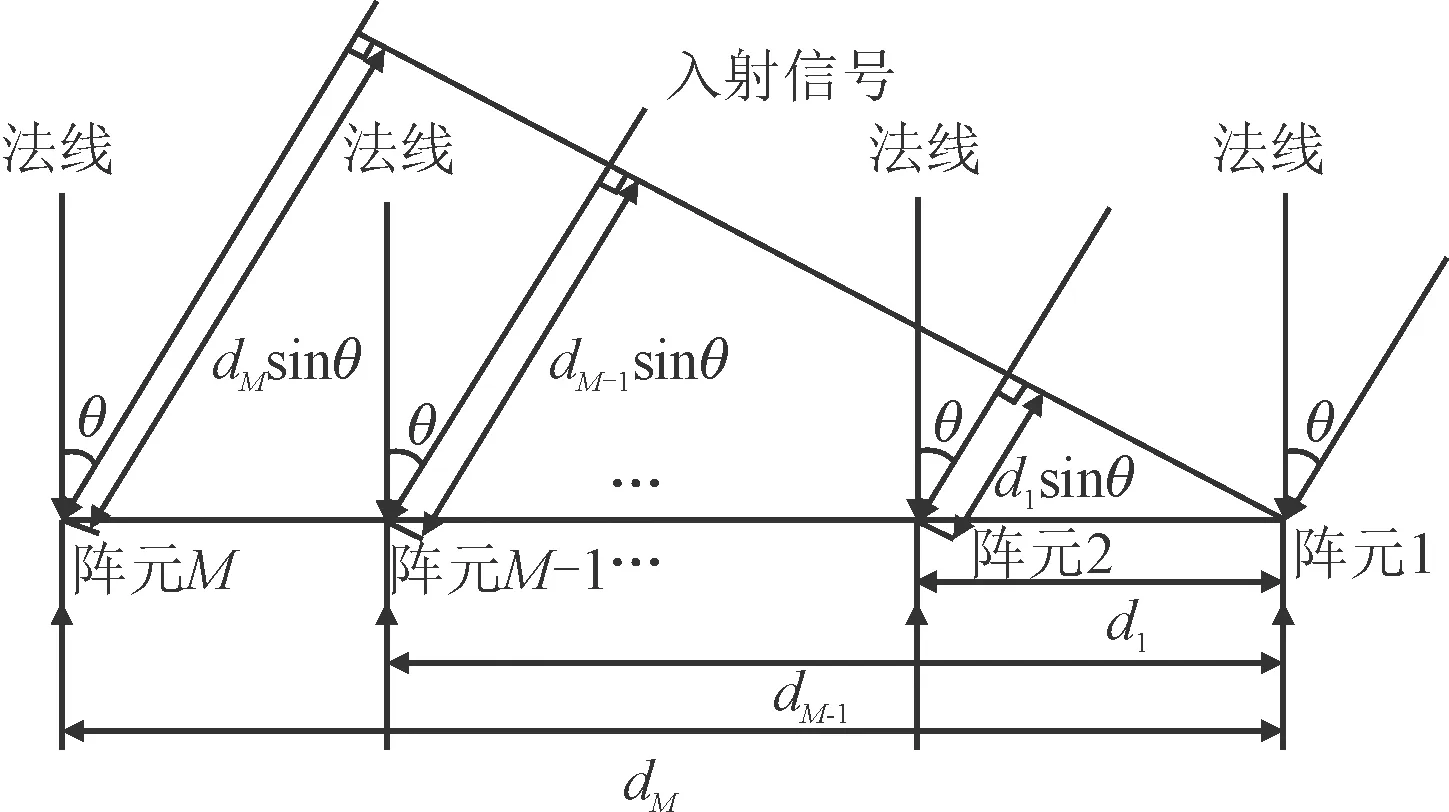

2 LMS算法
3 基于RLS的波束形成算法
4 仿真实验及分析


5 结论
