POS系统在无人机航空摄影中的应用
2018-03-31王贤
王贤

摘要:随着计算机和通信技术的发展,人们对无人机航空摄影定位定向的精度提出了更高的要求,将POS系统定位定向技术应用于无人机航空摄影中,能够得到载体实时性强、准确度高的位置和姿态信息。本文首先对POS系统的硬件组成进行了相关介绍,然后对POS系统在无人机进行航拍过程中的定位定向原理进行了分析,最后针对目前POS系统在航空摄影中的实际应用,介绍了POS系统未来的发展趋势和应用前景。
关键词:POS系统;无人机;航空摄影
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2018)06-0222-03
无人机具有控制方便,飞行灵活等特点,因此成为航空摄影中一种十分重要的飞行平台,尤其对于人类无法涉足的危险区域,比如地震、火灾等紧急状况突发地区,无人机可以提供有效的现场信息,实时传回紧急事件发生地区的影像资料,人们根据无人机反馈的现场信息以便快速展开救援工作。随着城市的智能化发展,无人机在航空摄影中扮演越来越重要的角色,因此,无人机如何准确、快速地获取目标区域的位置和姿态信息,是航空摄影测量面临的新的挑战。
近些年来,随着多种新型传感器的涌现和计算机通信技术的快速发展,将POS系统应用于无人机航空摄影中,为目标地区影像数据的获取提供了新的技术手段,能够实现快速、准确地获取航拍区域有效信息的目标。
1 POS系统硬件及各部分功能介绍
POS系统的硬件组成主要包含计算机控制系统、惯性测量单元IMU,以及GPS接收机。GPS接收机可以提供距离与波段等数据信息,当观测到4颗卫星以上时,采用载波相位差分动态定位技术,将地面基准站和机载GPS的相位信息进行处理,最后得到机载GPS的空间位置信息;惯性测量单元IMU附着在传感器的中心,它由数字化电路、陀螺仪、加速度计以及进行温度补偿与信号调解的处理器组成,IMU用于获取其相对地面的速度、位置和姿态数据,为了减小测量数据的误差,IMU通常需要保证其体积足够小,重量足够轻;计算机控制系统给传感器提供采样时间标识,它和GPS接收机、惯性测量单元IMU以及传感器协同工作,可以在无人机进行航拍的时刻,同时获取位置和空间姿态数据。
2POS系统测量原理
2.1 GPS测量原理
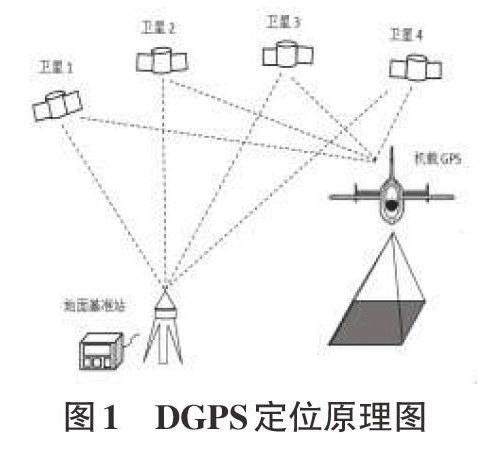
差分GPS定位技术(DGPS)主要分为伪距差分和载波相位差分两大类,它是一种新发展起来的GPS定位技术,能够对GPS进行更加准确地定位,如图1所示,DGPS原理主要是通过将多台安置在地面基准站上的GPS接收机,与无人机上的GPS接收机进行同步观测,通过量测地面基准站的坐标,从而计算得到基准站与卫星之间的距离改正数,机载GPS则以地面基准站实时发送出去的距離改正数作为参考,然后对自身的定位结果进行改正,以此提高定位精度。
载波相位差分是无人机航空摄影主要采用的定位技术,其观测量为GPS接收机k在时刻T所接收的卫星信号j与本地参考信号的相位差值,可表示为:
2.3 GPS/IMU组合系统测量原理
GPS可以全天候地提供目标载体精确的时间、速度以及位置等信息,并且它的误差不会随着时间的积累而增加,但是GPS严重依赖天气、地点、目标载体机动等外界条件,它在动态环境中的性能表现较差,并且可靠性会因为外界环境和无线电等因素的干扰而降低,因而极易产生周跳和失锁等系列问题;而惯性导航系统能够避免GPS容易受外部环境影响而降低性能的这一缺点,它不受气候、地点等外部因素的影响,也不会产生信号丢失的问题,但是容易因为时间的累积而增大导航误差。将GPS和惯性导航系统组合起来,可以利用二者各自的优势和劣势达到取长补短的效果,GPS有较高的定位精度,并且在长时间内也能保持较好的稳定性,因此采用GPS不仅可以弥补惯导系统容易产生累计误差这一缺点,还可以用来校正惯性导航系统提供的速度和位置等误差参数,而惯性导航系统又可以向GPS提供相关初始速度和位置等信息,以增加GPS的定向操作性能,使之能够快速获取卫星信号。
3 POS系统在航空摄影中的实际应用
3.1 GPS的实际应用
通常情况下,在GPS接收机确定的历元时刻进行量测,并对卫星信号保持跟踪,即可得到相位变化差值,但是,由于起始历元的整周模糊度以及GPS接收机与卫星振荡器的相位初值未知,所以只能作为未知参数在数据处理中计算求解。载波相位差分的定位方式依赖于整周模糊度,可以通过整周模糊度在航解算(OTF)这种方法计算动态环境中的整周模糊度,然后代入载波信号相位观测方程式,即可得到导航结果。在无人机航空摄影实际作业中,通常采用双频GPS接收机来提高定位精度,采用这种方式能够更加准确、迅速地计算出整周模糊度。
3.2 IMU的实际应用
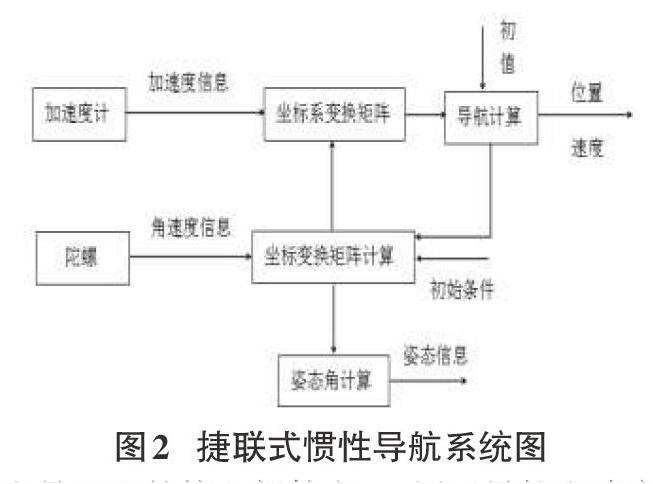
惯性导航系统在实际应用中分为捷联式和平台式两大类,由于捷联式具有成本低、体积小、可靠性高等优点,被广泛应用于无人机航空摄影中。捷联式惯性导航系统将加速度计和陀螺两大核心部件安置在目标载体上,陀螺测量目标载体在运动中相对于惯性参考系的角速度,并计算出载体坐标系与导航坐标系之间的变换矩阵,并把加速度计测量得到的加速度信息通过该变换矩阵换算到导航坐标系中,以得到目标载体的导航定位和姿态角等信息参数,如图2所示:
陀螺也是IMU的核心部件之一,用于导航和确定姿态参数的陀螺主要有三种:DTG(DryTuned Gvros,固态调协陀螺),尺寸小,低噪声,漂移稳定性0.01°-0.05°/h;RLG(Ring Laser Gy-ros,环型激光陀螺),精度高,尺寸过大,漂移稳定性0.001°/h;FOG(Fibre Optic Gvros,光纤陀螺),尺寸较小,低噪声,漂移稳定性0.01°-10°/h。FOG和DTG由于具有低噪声、尺寸小,飘移小等特眭,在无人机航空摄影中应用最为广泛。
3.3 GPS/IMU组合系统的实际应用
GPS和惯性导航组合系统通常采用卡尔曼滤波技术,根据组合的深度分为松散和紧密组合滤波两大类,松散组合滤波方式是将GPS定位结果当做惯性导航系统的初值输入,来校正惯导系统的误差,以提高定位精度,这种组合方法实现简单,但因为GPS的定位误差具有历元间相关这一特性,会导致最终定位结果和姿态参数存在系统误差;紧密组合滤波是将GPS和惯性导航系统协同起来工作,他们分别将伪距、伪距率、角速度以及加速度等信息输入组合滤波器,从而得到整个系统的导航结果,这种组合方式计算量大,并且容易受滤波器稳定性的影响。针对两种滤波方式的优缺点,在实践中可以设计一个复合滤波器,根据具体情况来动态地处理观测值信息,松散组合适合处理观测卫星数较多的情况,这种滤波方式可以由GPS独立计算得到精度较高的位置与速度信息;当观测卫星数量较少时,此时由于GPS无法进行独立定位,所以采用紧密组合方法,复合滤波器可以充分利用两种组合方式的优势,既能保证导航系统定位精度,又能使系统具有一定的稳定性和可靠性。
4结语
随着计算机和通信技术的发展,传统的无人机航空摄影定位定向技术已经不能满足人们的需求,POS系统将GPS接收机和IMU惯性测量单元组合在一起,可以充分发挥各自的优势,达到取长补短的效果。将POS系统应用于无人机航空摄影,可以提高目标区域定位定向的准确性和实时性,并且GPS/IMU组合导航系统能够直接提供影像数据的位置和姿态信息,从而性能也能得到大幅度提高。将POS系统定位定向技术融入无人机航空摄影是计算机和通信技术发展的必然趋势,随着GPS精密单点定位技术的发展及多种新型传感器的涌现,POS系统定位定向技术将在无人机航空摄影中扮演着越来越重要的角色。
