矿山巷道三维激光扫描点云复合滤波算法研究
2023-12-22李龙龙李雨成崔豫楠毋晓军李玉良
李龙龙 宫 成, 李雨成 崔豫楠 毋晓军 李玉良
(1.太原理工大学安全与应急管理工程学院,山西 太原 030024;2.陕煤集团神南产业发展有限公司,陕西 神木 719300)
三维虚体模型作为矿山智能化研究和应用的基础载体,是智慧矿山建设不可或缺的基石[1]。 三维激光扫描技术精准、快速的三维建模优点,为矿山全生命周期智能化管控的实现提供了技术支撑,在矿山智能化建设及矿山安全生产过程中发挥着至关重要的作用。
基于3D MAX、CAD 等软件的传统建模方法存在建模速度慢、精度低、成本高等问题[2],造成了智能化系统面临调控实时性差、可视化界面失真、数据采集费时费力等瓶颈。 传统测绘技术通过经纬仪、测距仪及GPS 实现三维信息获取,采集信息单一且易丢失,无法真实复原矿井复杂的环境。 随着现代测量技术变革,三维激光扫描技术突破了单点测绘的局限性,具有扫描速度快、效率高、精度高、成本相对较低、非接触测量等优点,能够通过数字模型完整反映复杂矿井特征[3-4]。 然而,该技术存在数据存储占用大量空间资源、传输率低、逆向模型重构工作量大、数据噪声大等不可避免的弊端[5],因此,利用后处理算法对点云数据进行精简和滤波降噪至关重要[6]。 针对点云数据分布特性,已有大量学者提出了包括体素、高斯、中值、双边等在内的数十种滤波方法[7-9]。 蒋通等[10]基于体素滤波算法实现了簇状噪声的滤除,但是并未实现数据体的简化。 JI 等[8]提出的细节特征点简化算法(DFPSA),提高了简化效果与精度,但是降噪效果不理想且无法滤除各类离群点。 闫冬等[11]提出了一种改进的高斯滤波方法,能有效控制偏移以保留点云的几何特征,但是该方法会模糊边缘,存在高频细节过平滑的问题。 在此基础上,随着模型复杂程度增加,学者们提出了两种滤波方法组合处理的思路[12-13],何昕谕等[14]提出了一种改进体素滤波和高斯滤波相结合的方法,能够对数据进行精简和降噪,使得曲面轮廓明显,但是对棱角边缘的降噪效果不理想。 尽管国内外学者在点云滤波方面做了大量工作,但面对矿山复杂巷道环境模型,现有的数据处理方法都无法获得较为理想的结果,其问题主要体现在:① 单一滤波算法在数据体简化和离群点方面,无法做到二者兼顾;② 单一滤波方法在处理复杂模型时,存在数据过度平滑或将棱角边缘模糊处理等问题;③ 两种方法组合的数据滤波,尽管能够分别适用于棱角边缘或曲面离群点处理,但在同时具有曲面、棱角边缘的矿山三维模型中适用性不强。
针对已有方法的不足,本研究依据算法侧重点和点云特征对滤波算法进行精准划分,将传统滤波算法分为数据精简和数据降噪两大类,进而结合矿山半圆拱巷道特征提出“剖面—轴向—随机”复合式数据精简滤波模型和复合式数据降噪滤波数学模型。 以实际矿山半圆拱巷道三维激光扫描数据为分析对象,通过与传统算法处理结果进行对比分析,论证新型复合滤波方法在矿山复杂巷道模型数据集处理中的适用性。 新型复合滤波方法在确保矿山巷道模型质量的前提下,可以满足矿山智能化建设对模型数据体大量精简与离群点高效处理的需求,能够为矿山全生命周期实时展示、预测奠定基础。
1 数据样本采集与滤波方法分析
1.1 点云基准数据集采集
本研究以矿山最典型的半圆拱巷道为分析对象(图1),巷道拱面几何特征弱,具有风门、风窗等精细化结构。 巷道点云数据集用5D Mark Ⅱ相机和RIEGL VZ-400 地面站激光扫描系统获得[15],其中,测站7 个,相邻点云间最小重叠率为5.5%、最大重叠率为32%,数据点约2.24×107个。 半圆拱巷道的拱面几何特征较弱,增加了同名点选择的不确定性和滤波难度。
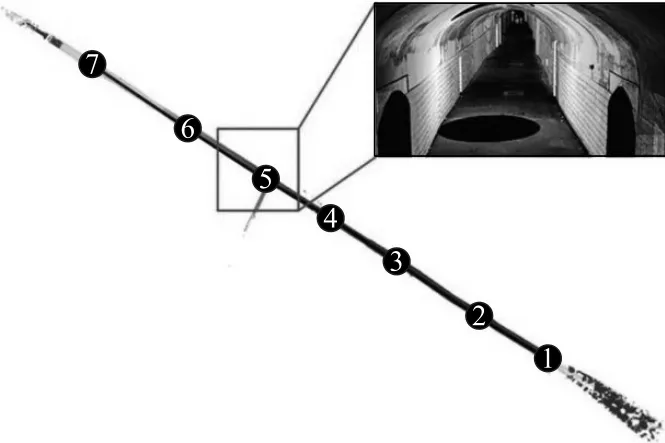
图1 采样区段位置Fig.1 Location of sampling section
1.2 点云滤波算法精准划分
利用点云滤波技术能够在不影响模型质量的前提下解决三维激光扫描数据体量庞大的问题,通过大幅降低数据量、消除噪声和离群点,从而提高数据的可用性。 三维激光扫描数据集中,根据数据位置分布特征,可将其划分为有效数据、冗余数据、重复数据和奇异数据。 有效数据是构成三维激光扫描模型所需的“骨架”数据,其保留的合理性决定了模型滤波的质量。 冗余数据是导致模型数据体量庞大的关键,由模型本身的复杂程度与点云间距所决定;重复数据主要由测点布局决定。 通过测点优化能够在一定程度上减小模型原始数据体量和扫描工作量。 奇异数据在三维激光扫描模型数据体中占比最小,其本身处理对数据体的精简比例不大,但奇异数据的处理是否合理直接影响了模型滤波质量和后期运算速度,是模型数据滤波的重要组成部分。
为了更合理、有效、保质地对三维激光扫描数据进行滤波,依据数据体的分类与功能,将数据滤波进一步细分为数据精简和数据降噪。 其中,数据精简主要针对冗余数据和重复数据,在保留模型主要特征的前提下,着重减小原始模型的数据体量和提高处理效率,用于无序点云;数据降噪是为了处理原始模型中的奇异数据,通过对模型有序点云数据进行甄别、判断与剔除,以提高点云数据的质量和准确性,进而为后期建模、仿真提供可靠支撑。
1.3 点云数据滤波逻辑框架
目前,已有的滤波算法主要有体素、高斯、条件等10 多种滤波算法[16],依据矿山巷道环境与构筑物状态条件,对各滤波算法的适用性进行验证,并结合各滤波算法特征与点云数据滤波分类结果,最终确定适用于数据精简的滤波算法包括体素滤波、曲率滤波和随机滤波,适用于数据降噪的滤波算法包括中值滤波、高斯滤波和双边滤波(图2)。

图2 点云滤波算法划分Fig.2 Partitioning of filtering algorithms of point cloud data
依据各滤波算法的处理特征与专长,以及矿山巷道环境与构筑物搭建需求,提出了数据精简与数据降噪的复合滤波算法,通过对各滤波算法的组合应用,以获得更高的数据处理效果。 利用C++和开源PCL开发框架,实现数据精简与数据降噪复合滤波,进而构建了点云数据复合滤波处理思路(图3),数据滤波后的数据以las、pcd 形式保存,并通过PCL 库呈现其三维模型。
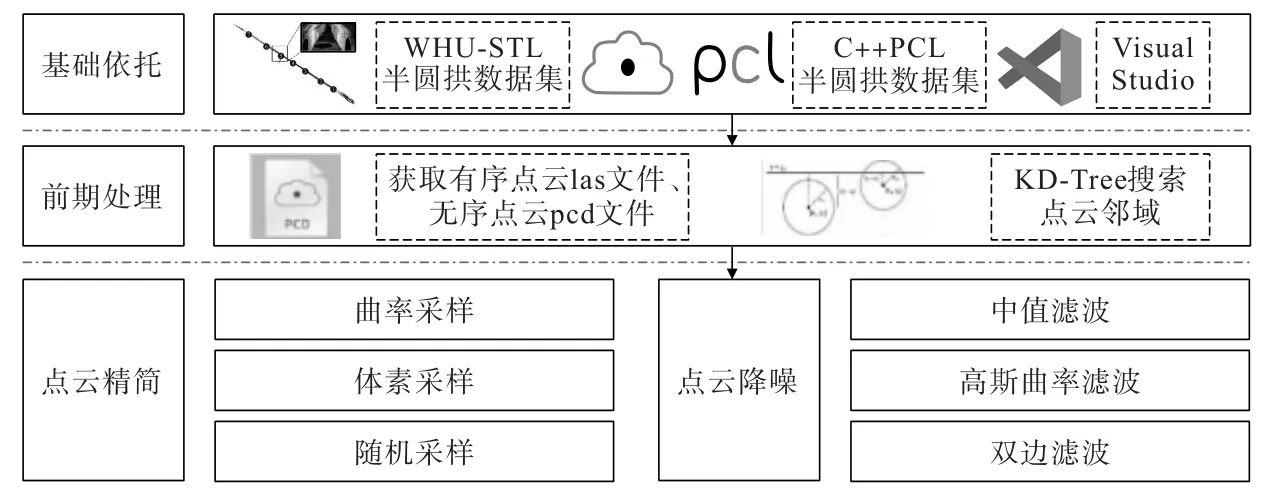
图3 巷道点云数据复合滤波逻辑框架Fig.3 Composite filtering logic framework of roadway point cloud data
2 基于复合滤波算法的数据精简研究
2.1 “剖面—轴向—随机”复合式数据精简滤波模型构建与实现
半圆拱巷道作为矿山最主要的巷道类型,其数据精简质量对矿山三维模型的快速、准确构建至关重要。 依据半圆拱巷道的组合形态特征,以确保巷道完整信息为前提,通过对各有效滤波算法的剖析,最终构建了“剖面—轴向—随机”复合式数据精简滤波模型,其构建与实现步骤如下:
(1)以原始三维扫描点云数据集为对象,巷道垂直长轴方向断面为目标,通过曲率滤波对原始数据进行一次精简。 采用主成分分析法测算该断面法向量,进而以法向量为纵轴建立直角坐标系;通过对曲线参数的拟合以获取待求点曲率;而后,通过获得的法线与曲率数据创建条件滤波器,以巷道模型构建需求设置曲率阈值,进而实现对巷道模型“剖面”数据的初次精简。 该滤波方法对巷道曲面的“伤害”最低,能够最大限度上保留拱面的弱几何结构,是数据精简的关键。 其中,法曲率[17]计算公式为
式中,Kn为法曲率;u,v为点云数据在曲面上的坐标值;Ⅰ、Ⅱ分别为曲面的第一、二基本形式;E、F、G为曲面的第一基本形式的系数;L、M、N为曲面的第二基本形式的系数。
(2)以“剖面”精简后的数据集为研究对象,以巷道长轴方向为目标,将一次精简数据集导入体素滤波模型中,根据巷道实际条件设置体素参数,选取距离体素中心最近的点云来代替体素中的所有点云,进而实现对模型的二次精简。 在曲率滤波的一次精简基础上,以“轴向”断面数据为重点进行二次精简,在保证模型质量的前提下实现最大程度的数据精简。 以三维体素质心代替网格内的所有点云数据[17],其计算公式为
式中,Vcentroid为非空体素质心;x、y、z为三轴方向上的点云坐标;n为体素V中的点云数目。
(3)在二次精简的基础上,利用随机函数生成囊括模型所有点云数据的随机数,按照等概率模式进行点云精简,从而实现对模型的三次精简。 随机滤波是一种等比例随机精简模式,由于其无法考虑模型的几何特征且精简过程具有随机性,其精度并不可控,但在一次、二次模型精简控制前提下,三次精简实现了确保模型质量前提下的数据进一步精简,以满足后期数据处理需求。
以本次采集的半圆拱巷道三维激光扫描数据为例,使用“剖面—轴向—随机”复合式滤波数据精简模型对数据集进行简化处理。 结果显示(图4),模型一次精简后,原始点云数据从2. 24×107个精简为9.36×106个,精简率达58.2%;二次精简后,剩余点云数据约1.90×105个,在一次粗化基础上,数据精简率达到98. 0%;三次精简后,最终点云数据保留为1.5×105个,在二次精简基础上,数据精简率为21.1%,在保留巷道完整信息状态下,与原始数据集相比,最终数据精简率为99.3%。
2.2 “剖面—轴向—随机”复合式数据精简滤波模型适用性分析
在尽可能保留巷道几何特征的前提下,通过体素滤波、曲率滤波、随机滤波和复合滤波模型分别对半圆拱巷道点云数据集进行数据精简,并以简化率、精简后点云密度、体积变化率和表面积变化率4 个评估点云精简质量的常用量化指标对精简结果进行对比分析。 其中,点云简化率是指删除的点云数据占原始点云数据的百分比;精简后点云密度是通过点云各点距离的平均值估算点云分布的密程度,其值越大分布越密集;体积变化率和表面积变化率是指精简模型体积和表面积占原始模型的百分比,变化率越小,对原始模型结构的保留程度越好。 计算结果显示,复合滤波算法能在保留原始点云模型结构的基础上实现数据的最大程度简化(表1)。
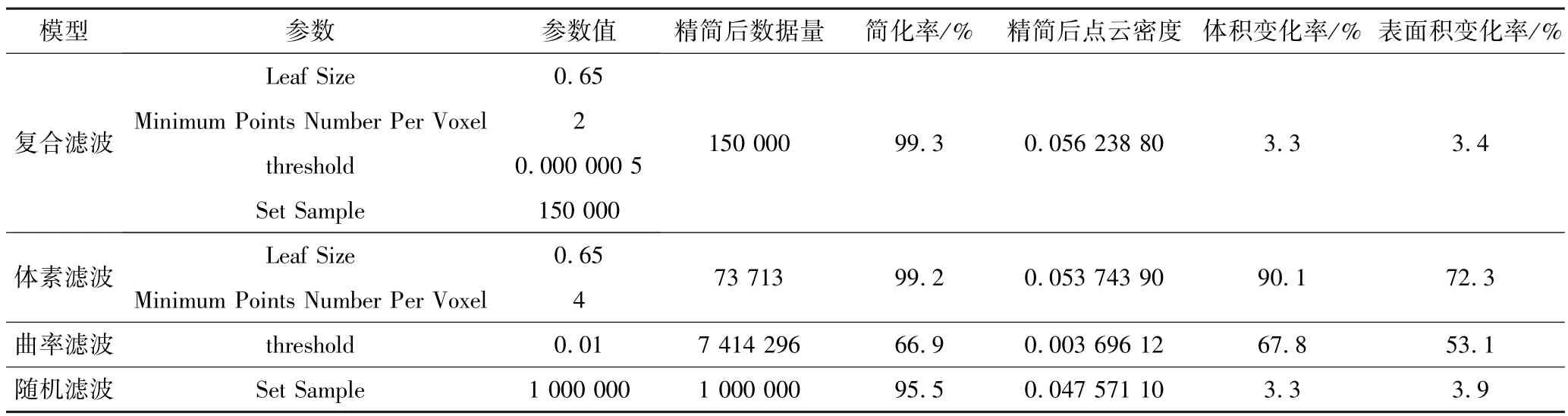
表1 精简算法参数设置与数据精简率计算结果Table 1 Parameter settings of refinement algorithm and result of data refinement rate
对比复合滤波与体素滤波数据精简结果可知,二者具有几乎相同的数据精简率,从精简后三维模型显示结果对比可知(图5),体素滤波本质上是取体素质心代替体素格内所有点云,具有对所有结构无差别精简的特性,该算法导致体素格或格中点云密度过大时将风门等精细化结构直接滤除,使得建立的矿井模型和实际情况不符,在矿井通风网络解算、灾变模拟时存在偏差,影响通风系统解算结果并降低灾变逃生路线制定的准确性。 复合滤波模型能够保留必要的精细结构,即高密度区不粗糙,保证了数据精简质量。此外,对于半圆拱巷道而言,模型点云数据具有两端稀疏中间密集的特点,体素滤波模型处理过程中,体素格包含点云数目较大时会损失巷道两端特征,导致低密度区域产生过平滑现象,较小时则会造成平滑滤波效果差的不足,复合滤波算法则很好地保留了巷道两端低密度区的特征轮廓。
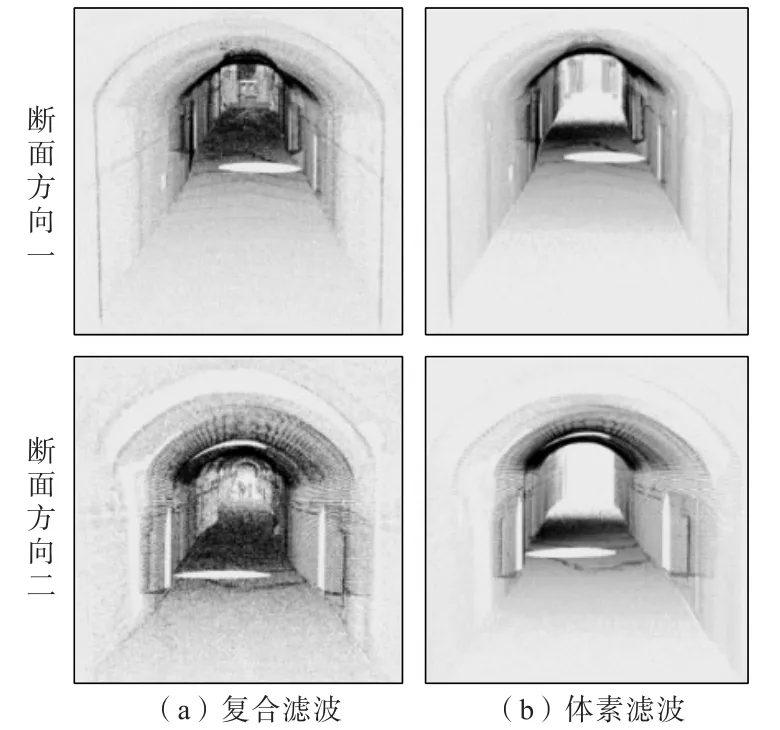
图5 复合滤波与体素滤波结果对比Fig.5 Comparison results of composite filtering and voxel filtering
与曲率滤波数据精简相比,复合滤波数据精简率明显更高,对比二者精简后的三维模型(图6)可知,曲率滤波结果同样存在构筑物精细结构被滤除的问题,但较体素滤波结果稍好。 同时,曲率滤波数据精简过程中,在点云数据密度大的区域平滑程度较低、密度小的区域则会过平滑,使得高密度区能够保留完整结构,低密度区却存在两端和扫描缺失部分出现结构失真的情况,这是由孤立离群点具有较低曲率以及曲率精简采样不均匀从而产生的大误差所致。 同时,曲率滤波数据精简模型形成了3 条黑线,即在低密度区域拱面和壁面分别只保留了拱顶和壁面中上部分点云,这是由于曲率滤波在去除噪声的同时也去除了部分边缘和曲面特征。 复合滤波算法则不存在上述低密度区结构失真和采样不均匀的问题。
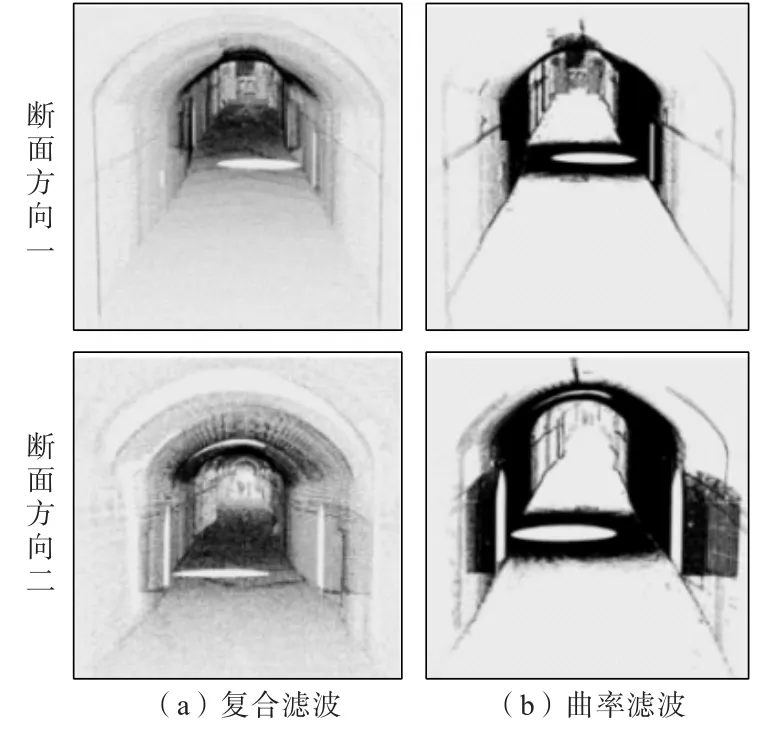
图6 复合滤波与曲率滤波结果对比Fig.6 Comparison of the results of composite filtering and curvature filtering
对比随机滤波与复合滤波数据精简结果,二者数据精简率相差不足4%,但从精简后二者三维模型对比可知(图7),在高数据精简率要求下,随机滤波精简后的三维模型几乎丧失了所有的巷道构筑物细节,甚至直接将构筑物滤除,在4 种滤波模型中滤波质量最差,这是由函数随机对不同密度区域进行无差别的随机精简所导致的。 此外,随机滤波的采样率与点云数据密度不匹配时,高密度点云数据区域获得的采样率不足,而低密度点云数据区域的采样率过高,会进一步导致数据精简结果失真。 而复合滤波算法针对不同密度区域采用不同的算法,解决了采样率不平衡的问题。
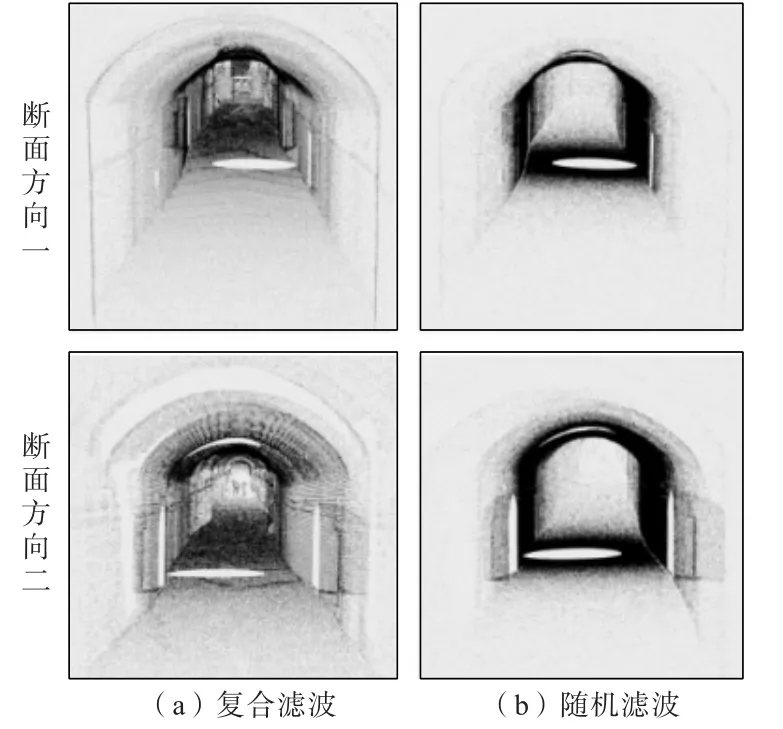
图7 复合滤波与随机滤波结果对比Fig.7 Comparison results composite filtering and random filtering
综上所述,对半圆拱巷道等矿山特征单元三维激光扫描模型而言,现有的数据滤波方法处理结果存在精细结构“丢失”、低密度区域过平滑和采样率不平衡的问题,无法在保证模型质量的前提下最大限度精简数据。 通过对不同特征滤波函数的合理组合保留了不同密度区域特征结构,能够在保证模型质量的前提下实现数据大规模精简,有效克服了单一滤波算法在矿山巷道模型数据精简中的不足。
3 基于区域划分的数据降噪算法研究
3.1 复合式数据降噪滤波模型构建与实现
矿山巷道环境建模中,巷道拱顶、采煤机切割头等以曲面形态居多,而巷道中下部、风门、机电等构筑物具有明显的棱角边缘特征,基于模型的区域性特征,以保障模型数据体质量为基本要求,构建了复合式数据降噪滤波模型。
以精简后的点云数据集为例,设定点云邻域中值半径以及属性参数[18],邻域内点云数据序列为f1,f2,…,fn,从有序点云序列中取m个点云数据,以坐标大小进行排序,以序号中值作为计算结果(式(3)),进而滤除模型中距离远的离群点,获得数据集1。 滤波公式为
式中,yi为所设半径的中值点;m为点云个数。
在此基础上,根据模型区域特征,对模型拱顶与中下部进行区域划分(图8)。 以ABCD面为分割面将数据中曲面形态显著、曲率变化较大的部分划分为数据集2(拱顶),具有清晰边缘和复杂几何结构的部分划分为数据集3(巷道中下部)。
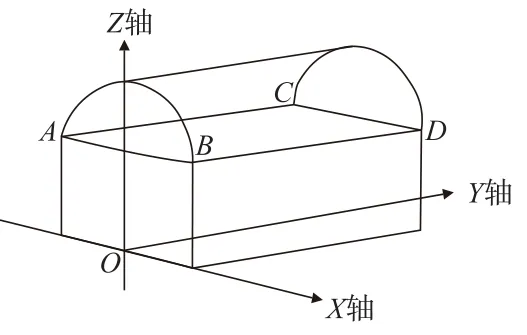
图8 半圆拱巷道区域划分示意Fig.8 Schematic of semi-circular arch roadway division
基于高斯函数经傅里叶变换后特性不变的原理,以数据集2 为研究对象,确定区域赋以高斯分布权重,利用KD-Tree 实现对点云密度的计算,基于二维高斯函数(式(4))实现对曲面邻近区域内奇异点的剔除[19]。
式中,A为幅值;x0,y0为中心点坐标;σ2x,σ2y为方差。
同时,以数据集3 为研究对象,利用双边滤波保留边缘的特性,通过计算每个点与中心点的空间临近度,将其乘以数据强度的权重值,然后将优化后的权值与强度进行卷积运算(式(5)),进而去除棱角边缘附近的奇异点云数据[20]。
式中,k、l为窗口的中心点坐标;i、j为窗口其他系数的坐标;σ2a为方差;a为窗口大小。
最后,将数据集2 和数据集3 重新组合,形成最终数据集,以此实现在确保模型数据质量前提下的数据降噪。
从初始巷道断面特征可知(图9),巷道底部存在明显的噪声,拱顶噪声信号弱,经过中值滤波降噪后,远离模型的奇异点被滤除,模型质量保存完好;在此基础上,对模型进行分解,通过高斯滤波进行曲面降噪、双边滤波进行保边降噪,模型底部近距离奇异点被剔除,同时,巷道棱角、细节得以保留。
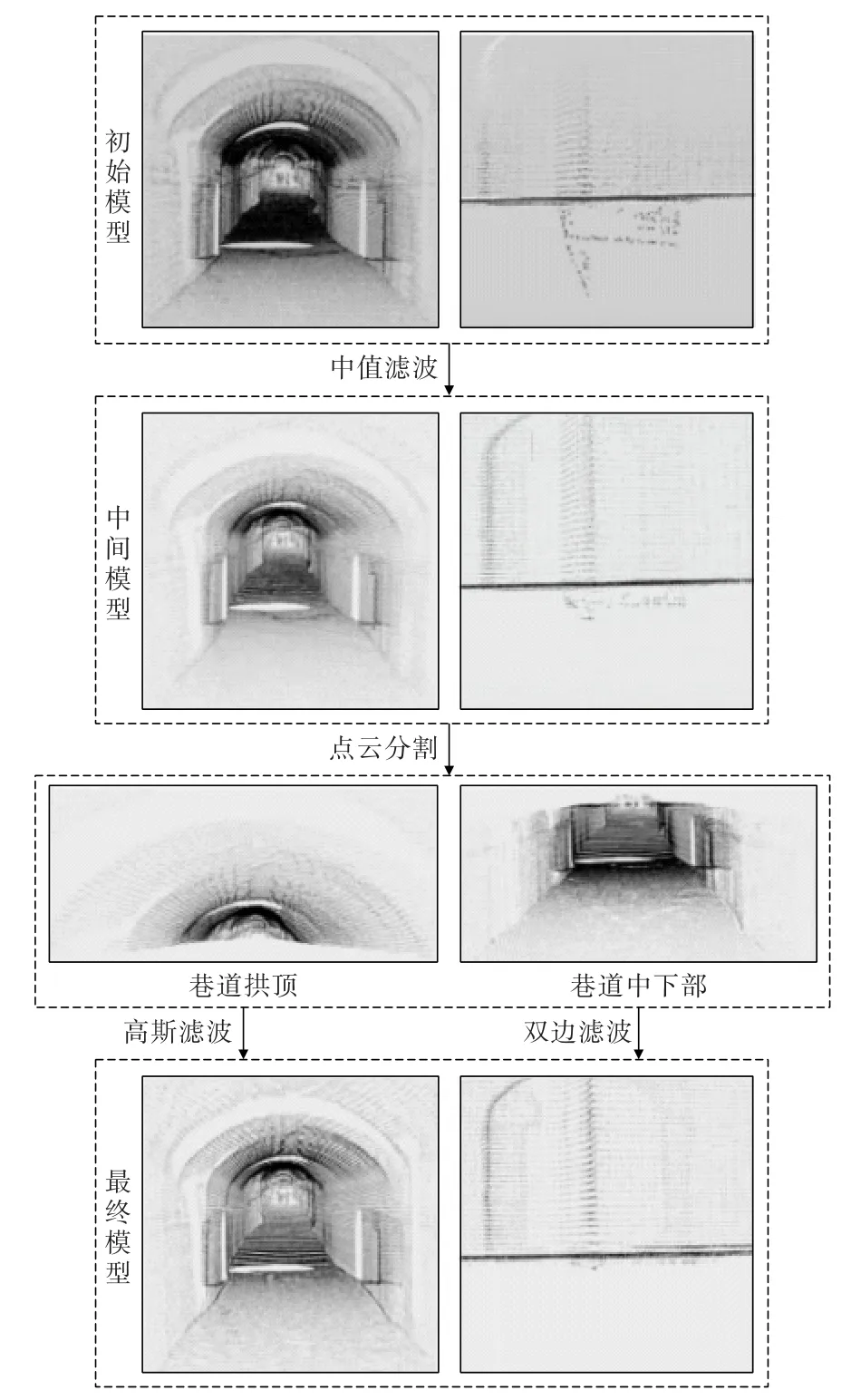
图9 复合降噪流程与结果Fig.9 Process and results of composite filtering
3.2 半圆拱巷道离群点滤除效果对比分析
用3 种典型降噪算法和复合式数据降噪滤波模型对精简后的半圆拱巷道模型分别进行降噪处理(表2),单一算法与复合算法的参数设置相同,在不改变半圆拱结构的前提下,对比3 种单一算法和复合算法对半圆拱巷道的降噪效果,观察特征离群点的滤除情况。
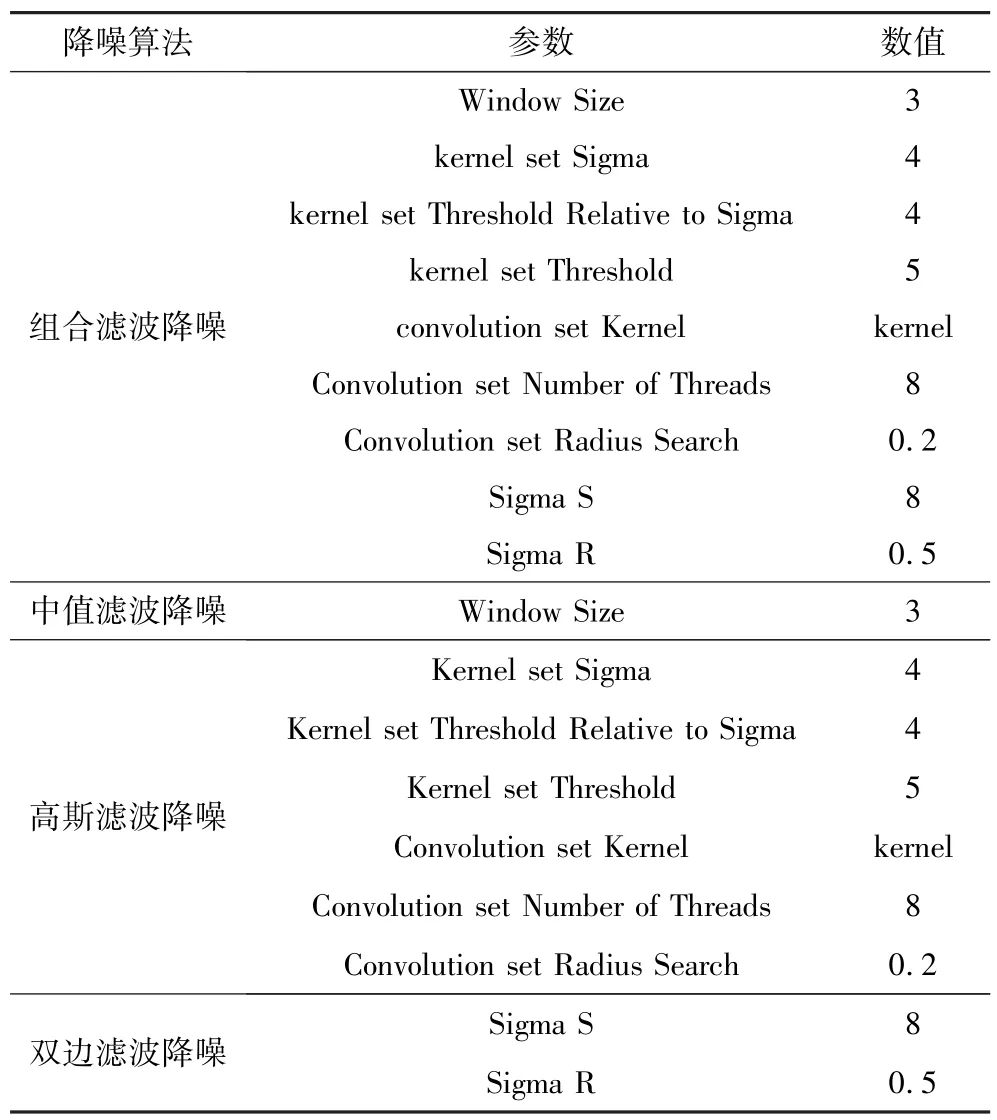
表2 降噪算法参数设置Table 2 Parameter setting of de-noising algorithm
降噪结果显示(图10):4 种方法均能不同程度地实现离群点的滤除且不改变原有特征,中值滤波(图10(a))主要将距离模型较远的离群点全部滤除,对巷道结构附近的点滤除效果不理想,这是由于中值滤波不考虑各点权重差别,只是进行中值排序。高斯降噪(图10(b))在离群点处的降噪效果最差,这是由于噪声与模型相差大,高斯滤波器的加权平均操作无法有效消除所有噪声,使用高斯滤波器可能需要结合其他滤波方法或调整参数,以降低噪声对滤波效果的影响。 双边滤波(图10(c))对离群点的滤除效果好,但在边缘处仍保留了部分离群点,且在边缘处出现了一些新的细小噪声,这是由于双边滤波会在边缘处保持过多的高频分量,导致轻微的噪声没有被完全消除,留下随机的小点和噪声点。 对于组合降噪(图10(d)),尽管噪声没有被全部滤除,组合滤波降噪相较3 种单一降噪方法效果最佳,这是由于组合降噪通过3 种经典降噪算法的优势互补可以实现对椒盐噪声、高斯噪声、强噪声等各类噪声的有效滤除。
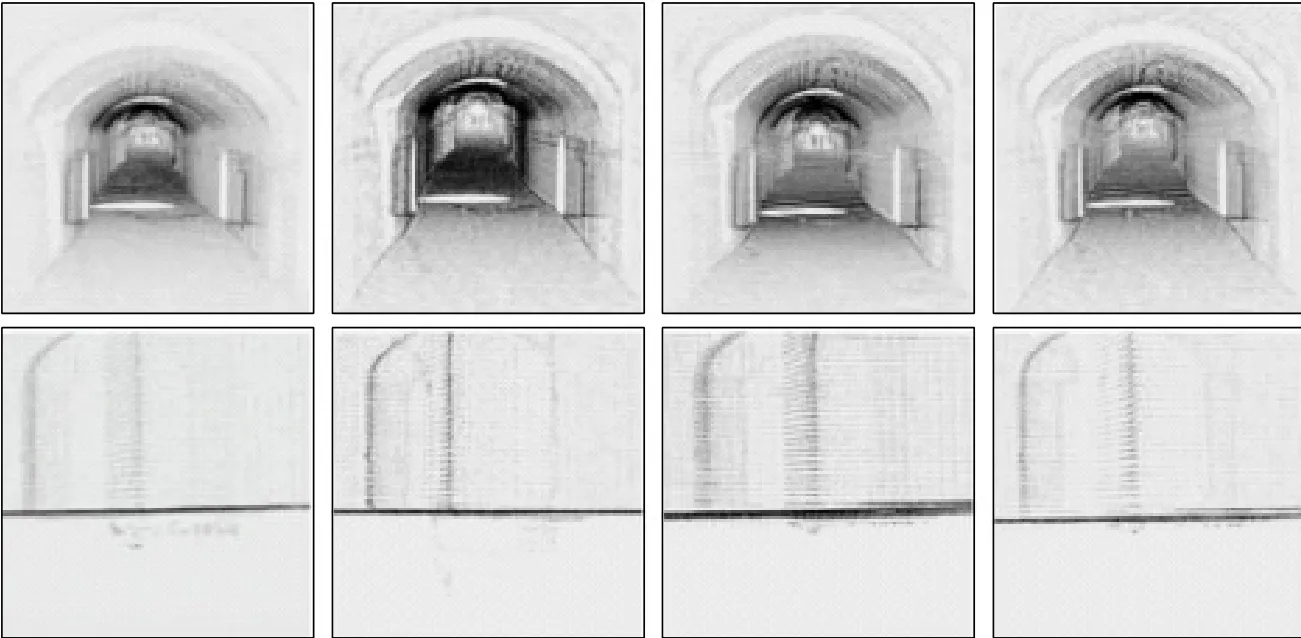
图10 不同降噪方法结果对比结果Fig.10 Comparative results of different noise reduction methods
4 结 论
本研究以矿山半圆拱巷道模型数据集为依托,利用C++和PCL 库开发框架,研究了典型滤波算法的特性,提出了数据滤波算法精准划分、“剖面—轴向—随机”复合式数据精简滤波模型与复合式数据降噪滤波模型。 从半圆拱几何特征、点云简化率、点云密度、表面积和体积变化率角度对数据精简算法性能进行了评价,并从离群点滤除度、保边降噪效果方面对数据降噪算法性能进行了分析。 所得结论如下:
(1)将三维激光扫描模型数据滤波划分为数据精简和数据降噪两类,其中,精简注重迅速高效地实现数据量的大幅降低,主要用于无序点云;数据降噪在于提高点云质量从而使模型更加可靠,主要用于有序点云。
(2)基于矿山巷道与构筑物特征,构建了“剖面—轴向—随机”复合式数据精简模型,以半圆拱巷道模型数据集为研究对象,对比分析已有滤波算法与复合滤波数据精简算法,结果表明:复合算法能有效避免单一算法存在的精细结构、低密度区过平滑和采样率不平衡的问题,具有低密区不失真、高密区不粗糙的优势。
(3)在巷道结构与降噪算法特征分析的基础上,构建了复合式数据降噪模型,以精简后模型为研究对象,对比分析了各降噪算法的离群点滤除效果,结果表明:4 种降噪方法均能在不影响原本结构的前提下实现不同程度的离群点滤除,复合降噪算法能够在不出现新噪声的情况下有效滤除椒盐噪声、高斯噪声等各类离群点,实现更好的降噪效果。
