6 种不同水层长江鱼类的趋触行为
2023-08-01邱宁喻燚贾建娜段鑫越彭士涛马国强
邱宁 , 喻燚, 贾建娜, 段鑫越, 彭士涛, 马国强
(1. 交通运输部天津水运工程科学研究所,水路交通环境保护技术交通行业重点实验室,港口水工建筑技术国家工程研究中心,天津 300456; 2. 四川省农业科学院水产研究所,成都 611731)
鱼类的行为代表了它们对内部(生理)和外部(环境)因素的表观反应,不仅与其个体的觅食、繁殖等活动密切相关,也是它们与其他生物体的主要联系方式,以及对周边环境的主要适应方式(Scherer,1992;Morris,2005),因此,对鱼类行为的研究可为河流、湖泊等水域栖息地营造及生境修复提供重要的理论支撑。趋触行为又称贴壁运动,是指动物倾向于在环境的四周区域活动,而很少进入中心地带的现象(Treit & Fundytus,1988;Sharmaet al.,2009)。该行为最初在啮齿类动物中发现(Harriset al.,2009;Harris,2021),后被发现广泛存在于甲壳类(Basil & Sandeman,2000)、人类Homo sapiens(Kallai,2007;Gromeret al.,2021)、鱼类(Schnorretal.,2012;Qiuet al.,2017)和昆虫(Doriaet al.,2019;Chenet al.,2022)等多种生物类群中。
目前对墨西哥丽脂鲤Astyanax mexicanus(Sharmaet al.,2009)、斑马鱼Danio rerio(Schnorretal.,2012)、青鳉Oryzias latipes(Qiuet al.,2017)、金鱼Carassius auratus(Watanabeet al.,2021)和部分洞穴盲鱼(Wonget al.,2010)等的趋触行为开展了研究,但对长江代表性鱼类的相关研究还较为缺乏,且已有研究多集中于该行为对压力和焦虑的表征意义及抗焦虑药物的筛选方面(Langovaet al.,2023),而对该行为本身的生态适应意义及其在生境保护修复中的应用还少见讨论。鱼类的趋触行为表面上与其对捕食者的躲避、对陌生空间的探索,以及在不利的环境中探索出口等多种因素有关(Treit & Fundytus,1988;Simonet al.,1994),但其本质上是一种对空旷区域的厌恶与回避,是其与栖息地边界保持密切接触的一种表现方式。该行为的强度会因不同物种间行为习性及视觉能力(Sharmaet al.,2009)等因素的差别而异,且会受到光照强度(Schnorret al.,2012)等环境因素的影响。另一方面,长江流域水运及水利事业的发展导致各类涉水工程的密度及体量逐年增加,而水工构筑物的内部和周边均会产生大面积的空旷区域。对长江鱼类的趋触行为模式及其在不同鱼种间和不同环境下的差异性进行研究和量化,可为涉水工程构筑物结构形式的生态优化和鱼类生境修复提供理论指导,如在鱼类资源调查的基础上,根据周边水域鱼类的种类分布,指导工程建设时应多大程度上避免硬质旷场的出现,或工程建设后应在哪些位置对已有旷场进行生境复杂化营造和修复,因此,这一研究对长江鱼类栖息地的保护和修复具有重要意义。
1 材料与方法
1.1 试验材料
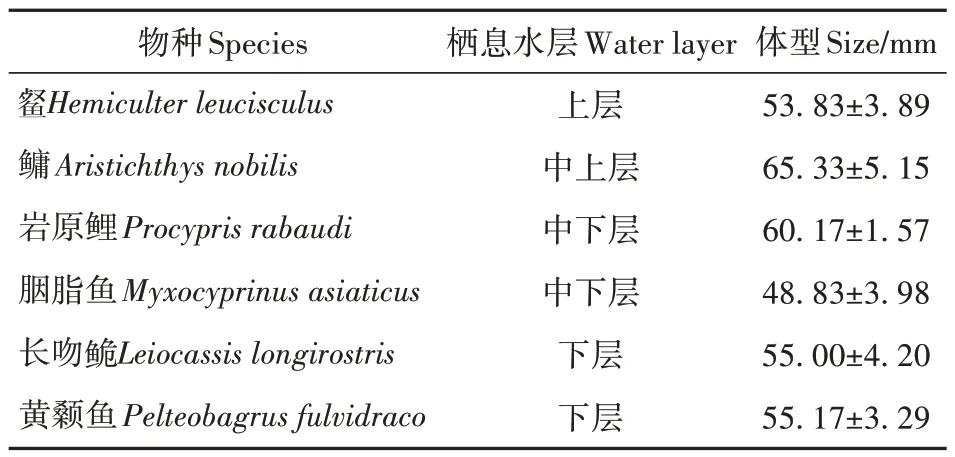
表1 本实验用鱼Table 1 Information of fish used in this study
1.2 试验方法
实验容器为长50 cm×宽35 cm×高25 cm 的观测水缸,四面缸壁和底部用灰色不透明颜色纸包裹,以减小周围环境的干扰。观测容器底部被均匀分成面积相等的内外2个部分(图1)。
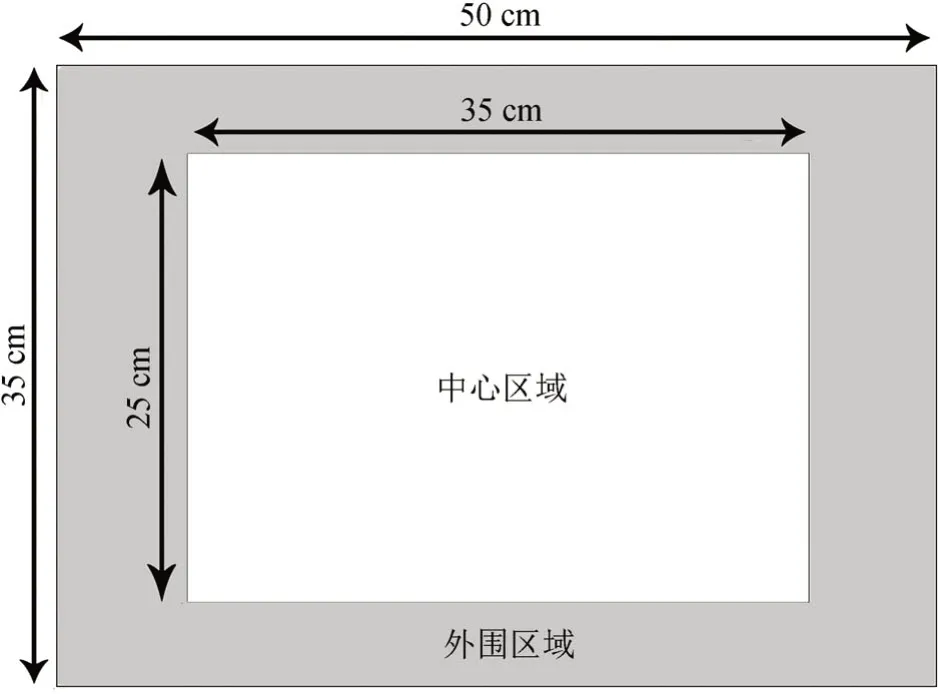
图1 测试水缸示意图Fig. 1 Schematic diagram of test tank
实验分2个时间段进行,尽量和自然的昼夜节律保持一致:光照环境下的实验在08∶00—18∶00进行,由容器顶部的LED 灯提供均匀的光照,平均光照强度为300 lux,行为观测设备为高清CCD 摄像系统(TTQ,中国深圳)。黑暗环境实验选择在18∶00—08∶00 且在全遮光的暗室中进行,行为观测设备为红外夜视高清摄像系统(温皓电子,中国温州)。
实验开始时,容器中注入曝气自来水,水温25~27 ℃。每次1 尾鱼被轻轻地移入水缸中,5 min适应后,摄像头和配套拍摄软件开始对其行为状态进行拍摄,每尾鱼拍摄4 h,使用matlab 2017b 自编程序对视频中的实验鱼进行检测和位置识别判定,通过在程序中预先设置中心区域和外围区域的分界线,程序自动统计实验鱼在2个区域的累计停留时长并生成相关数据,当实验鱼至少50%的身体位于某区域时方判定其位于该区域内,程序同时生成实验鱼的轨迹路线图和分布热度图。
此外,使用自编程序对拍摄的视频进行帧分割和帧提取,每60 s 抽取1 帧,对每帧中实验鱼的行为状态进行人工识别,统计每种行为模式出现频次。对于每组实验,每种鱼均使用6 尾进行6 次重复,每尾鱼只使用1 次,每次实验后均换掉缸中水体并进行清洗,以减小前一尾鱼释放的信息素对后一尾鱼行为的干扰。实验过程均经过交通运输部天津水运工程科学研究所生物实验伦理委员会批准。
1.3 统计分析
分别使用Kolmogorov-Smirnov 和Levene 法对数据进行正态分布和方差齐性检验。同种鱼外围区域停留时长在昼夜间的差异及不同鱼类物种之间外围区的停留时长差异采用单因素方差分析和多重比较(最小显著差异法)进行组间差异分析。所有数据分析在SPSS 20.0 中进行。使用基于mat⁃lab 2017b 的自编程序对实验鱼在实验容器中的运动轨迹进行识别和追踪。由于黑暗环境中红外摄像头拍摄画面分辨率较低,对实验鱼游动轨迹的追踪效果较差,因此,本研究仅将每种鱼在光照环境实验中的运动轨迹进行叠加,生成每种鱼在光照环境下的典型行为轨迹线图和轨迹热度图。
2 结果
2.1 趋触行为
在光照环境(图2:a;P<0.001)和黑暗环境(图2:b;P<0.001)的测试中,6 种鱼在外围区域的停留时长均极显著大于中心区域。光照环境下,黄颡鱼在外围区域的停留时长最长,为238.33 min±1.16 min,在外围区域的停留时长最短,为184.67 min±9.22 min;黑暗环境下,胭脂鱼在外围区域的停留时长最长,为234.17 min±1.02 min,长吻在外围区域的停留时长最短,为211.50 min±2.14 min。以实验鱼在外围区域的停留时长表征趋触行为强度,则6种鱼趋触行为强度在光照环境下从大到小依次为:黄颡鱼>胭脂鱼>岩原鲤>长吻>鳙>;黑暗环境下从大到小依次为:胭脂鱼>鳙>黄颡鱼>岩原鲤>>长吻。
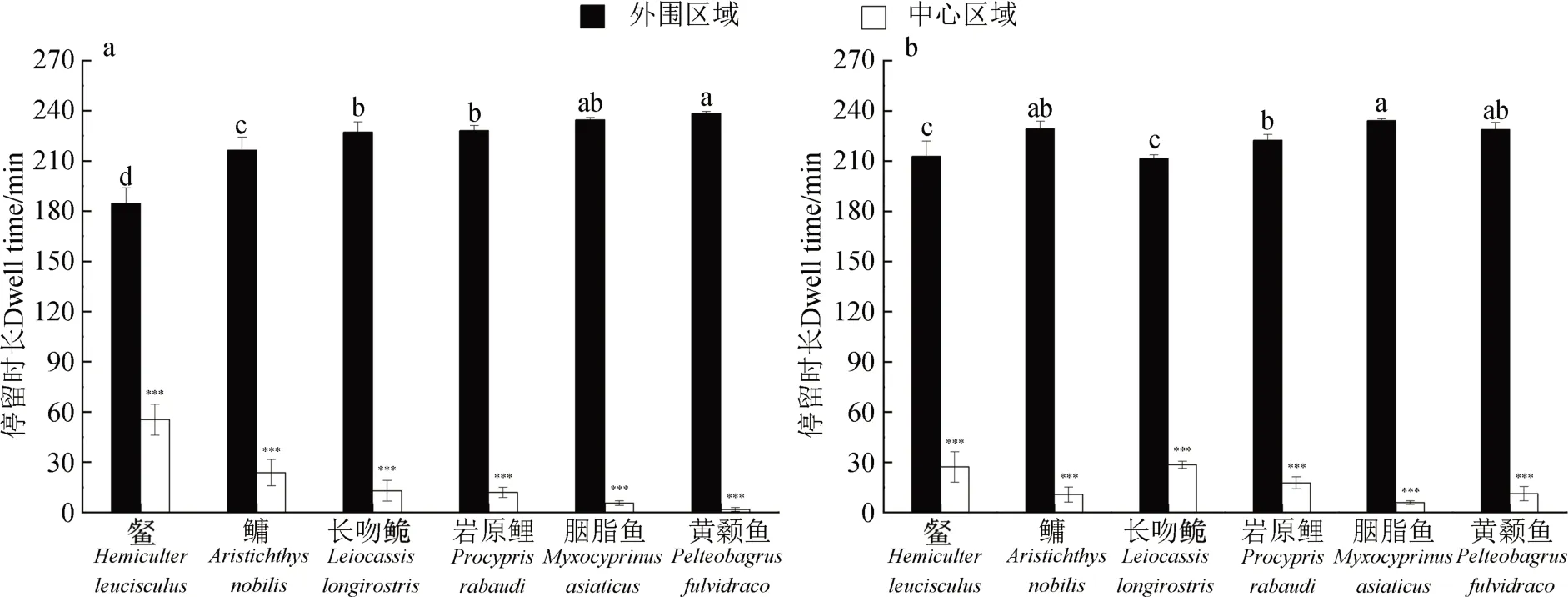
图2 光照(a)及黑暗(b)环境下实验鱼在2个区域的停留时长Fig. 2 Dwell time of experimental fish in two areas under light (a) and dark (b) environments
在光照环境(图2:a,P<0.001)和黑暗环境(图2:b,P<0.001)下,6 种鱼类趋触行为强度的种间整体差异达到极显著。各种类两两间比较结果表明,光照环境下,除长吻与岩原鲤(P=0.771)、胭脂鱼与岩原鲤(P=0.072)、胭脂鱼与黄颡鱼(P=0.268)、长吻与胭脂鱼(P=0.059)4个组合外,其他各组两两间均有显著差异(P<0.05)。黑暗环境下,与长吻(P=0.667)、鳙与胭脂鱼(P=0.125)、鳙与黄颡鱼(P=0.871)、鳙与岩原鲤(P=0.060)、岩原鲤与黄颡鱼(P=0.072)、黄颡鱼与胭脂鱼(P=0.092)之间无明显差异,其他鱼类两两之间均有显著差异(P<0.05)。
行为轨迹分析表明,黄颡鱼(图3:f)、岩原鲤(图3:e)、胭脂鱼(图3:d)和长吻(图3:b)的活动轨迹线在外围区域密集,中心区域极为稀疏,鳙(图3:c)在中心区域的轨迹线密度较密,在中心区域的轨迹线最密,且在整个实验空间分布较为均匀(图3:a),轨迹热度图也显示了类似特征(图4)。另外,趋触行为较强的岩原鲤(图4:e)和黄颡鱼(图4:f)在角落位置的分布热度最高。

图3 实验鱼的运动轨迹Fig. 3 Motion trail of experimental fish
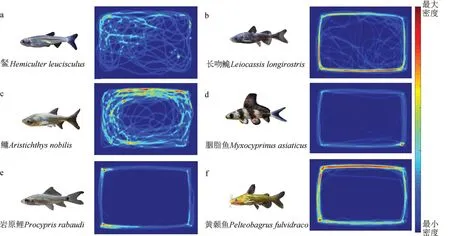
图4 实验鱼的轨迹热度图Fig. 4 Heat map of motion trail of experimental fish
2.2 光照与黑暗环境下的趋触行为差异
除胭脂鱼外,其他5种鱼的趋触行为强度在光照环境和黑暗环境之间均有显著差异(P<0.05)。(亮:184.67 min±9.22 min,暗:212.83 min±9.07 min)和鳙(亮:216.33 min±7.83 min,暗:229.33 min±4.45 min)在光照环境下的趋触行为强度低于黑暗环境,长吻(亮:227.17 min±6.15 min,暗:211.50 min±2.14 min)、岩原鲤(亮:228.17 min±3.06 min,暗:222.33 min±3.54 min)和黄颡鱼(亮:238.33 min±1.17 min,暗:228.83 min±4.22 min)则相反(图5:a)。

图5 光照和黑暗环境下外围区域停留时长(a)和“头部触壁模式”出现频次(b)Fig. 5 Dwell time in the outer area (a) and frequency of ‘head touching wall’ pattern (b)in the light and dark environments
除外围区域停留时长外,6 种鱼的游动模式总体可归为2 类:“头部触壁模式”,即实验鱼以头部直接触碰缸壁,身体与缸壁呈现出一定的夹角;“头部离壁模式”,即鱼体以平行于缸壁的形式靠近缸壁或在中心区域活动等(图6)。光照环境(P<0.001)和黑暗环境(P<0.001)下,6 种鱼“头部触壁模式”的出现频次整体存在极显著的种间差异。且(P<0.001)、鳙(P<0.001)、岩原鲤(P<0.001)和胭脂鱼(P<0.01)的“头部触壁模式”出现频次在光照环境和黑暗环境下也存在极显著差异(图5:b)。

图6 2种游动模式示意Fig. 6 Diagram of two swimming patterns
3 讨论
尽管本文6种鱼类均有明显的趋触行为,但不同鱼种的行为状态存在差异。根据已有资料和野外观测记录,这6 种鱼自然状态下的分布水层不同:黄颡鱼(李明锋,2010)与长吻(林显道等,2009)分布于底层,岩原鲤(蔡焰值等,2003)与胭脂鱼(周学金等,2015)分布于中下层,鳙(詹斌桂,2018)分布于中上层,则主要分布于上层,喜贴近水面集群游动。因此,光照环境下6种鱼趋触行为强度与其自然栖息水层具有一定的关联规律,总体呈现出从上层鱼到下层鱼逐渐增强的趋势。
本文对长江代表性鱼类趋触行为的探索能够为长江涉水工程构筑物周边旷场区域鱼类栖息地营造及生境修复提供一定的行为学数据基础和理论指导。鱼类在典型旷场中的趋触行为是一种压力和焦虑的反应,它与鱼类对捕食者的躲避、对陌生空间的探索、对空旷区域的恐惧,以及在不利的环境中寻找离开的出口等行为有关(Treit & Fundy⁃tus,1988;Simonet al.,1994)。当前长江流域中的拦水坝、丁坝、梳齿坝、护岸、护坡等多种涉水工程构筑物均会在周边水域形成或大或小的典型旷场,如拦水坝的边缘区域及丁坝的坝田内等。由于工程构筑物附近独特的水沙环境(如丁坝坝田区域的淤积效应),上述区域形成的旷场内往往少有水生植被等躲避物,当鱼类由于觅食或躲避捕食者而误入该区域时,忽然出现的空旷区域可能会激发鱼类内在的焦虑和恐惧本能,从而诱发趋触性,因此在旷场的边缘区域适当增大生境复杂度或避免出现过于空旷的区域可为长江涉水工程周边的鱼类提供更加适宜的生境。此外,本研究结果还表明栖息水层更低、躲避性更高的鱼类具有更强的趋触性。因此,在长江涉水工程鱼类生境营造中,可根据相关水域的鱼类物种组成调查结果,采用相应的复杂生境营造强度,可在最大程度契合鱼类栖息的同时,减轻工程的作业成本。