无人机编队中的高精度抗干扰相对定位技术研究
2021-11-27房屹光
房屹光
(中国电子科技集团公司第二十研究所,西安 710068)
1 引 言
无人机编队飞行是多架无人机在自主飞行构成编队的过程中,通过对长机和僚机的相对位置、相对速度等参数的设置,完成队形排列变换、任务分配的组织模式。无人机编队在执行飞行任务时不仅能够扩大侦察及搜索的范围,还可以对目标进行全方向、各个角度的攻击等任务,而这些功能完美实现的前提就是无人机编队网络中高精度的节点定位。因此,对无人机编队网络中节点定位的研究具有重要的现实意义。
目前,针对无人机编队飞行定位多采用协同导航和相对定位的方式。多无人机协同导航定位离不开相对导航方式,尤其复杂环境条件下多无人机的编队飞行。由于无人机编队中通常要求无人机的数量较多,因此无人机间的距离较近。无论是在定位精度、抗干扰能力,还是成本方面,相对导航定位的传感器优于绝对导航定位传感器[1]。
目前,国内外多位学者针对动态定位的数学模型、模糊度解算等方面进行了较为深入的研究,取得了较为丰富的研究成果。Alam、Muller 等研究了基于码的相对差分定位,Chen、D’Amico、Montenbruck 等通过模糊度固定、实时动态(Real Time Kinematic, RTK)定位实现厘米级精度;喻国荣应用固定基线长的限制条件获得测站间的相对姿态。张先春[2]针对联动目标的高精度相对定位进行了研究。徐冠楠等[3]建立了动动差分相对定位模型,同时也提出了准动态和动动实验两种计划。刘万科等[4]基于KinPOS 软件对BDS/GPS动对动相对定位性能进行了分析,可以满足高精度相对定位使用需求[2-8]。
对于动对动相对定位,观测环境复杂,卫星数变化频繁,周跳及粗差多,数据质量通常较差,常规的质量控制方法效果并不理想,限制了卫星导航动对动定位的实际应用。实时高精度动态定位的另一个挑战是延迟问题。当基站通过通信链路将原始卫星导航数据传输到移动站时,数据总有一些延迟。此外,传输数据的更新率可能与移动站车的数据采样率不一致。对于低动态的应用,如测量和大地测量,延迟较短,采用不同解决方案是可以接受的。但是,对于高速安全关键应用程序,此延迟将导致性能出现不可接受的降级,因此必须重点考虑。
受覆盖范围、通信距离等因素限制,传统同步实时动态(Synchronization Real Time Kinematic,SRTK)定位(指固定基准站)难以满足无人机编队高动态、广范围的应用,需要考虑使用移动基准站(Moving Base)进行移动站(Rover)的相对定位。由于不可避免的延迟问题,必须考虑基准站在延迟期间的移动,提出了一种异步载波相位差分(Asynchronous Real Time Kinematic,ARTK)结合时差载波相位(Time-Differenced Carrier Phase,TDCP)的方法,高精度动动相对定位。为进一步提高复杂电磁环境适应性,采用高精度抗干扰技术提升动动相对定位性能。
2 动动相对定位方法
2.1 AR TK 原理
RTK 采用载波相位观测量实现高精度定位,对于接收机u,收到卫星j信号的载波相位观测方程为

其中,φ表示载波相位观测量,ρ表示接收机到卫星的几何距离,c 表示光速,δtu、δtj分别表示接收机、卫星钟差;λ表示波长,N表示整周模糊度;I、T分别表示电离层、对流层延迟,ε表示其他误差(多径、噪声等)。
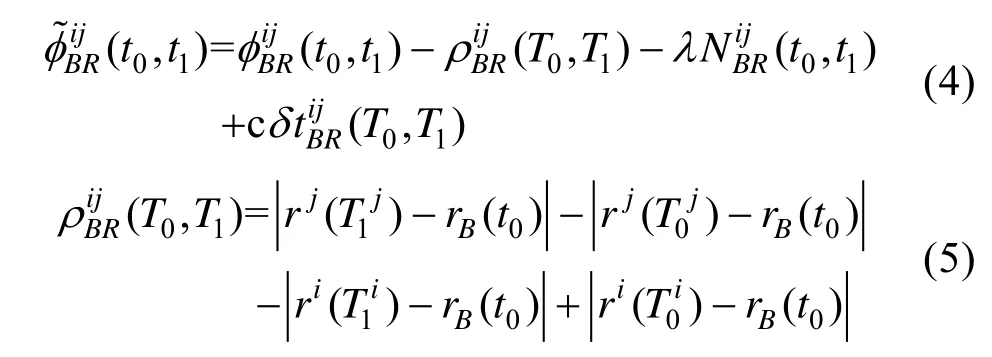
在实时相对定位中,用户必须通过数据通信链路从基准站接收机发送和接收观测数据。在这个过程中,总会有一些传播延迟。此外,基准站接收机数据的传输速率可能与移动站接收机数据的采样速率不同。用t0和t1分别表示基准站和移动站的观测历元,星间接收机间异步双差算子可表示为
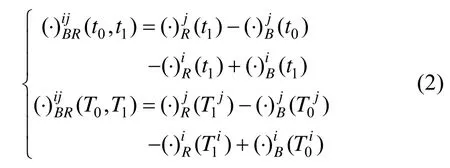
其中,B、R分别表示基准站和移动站,i、j表示卫星号,T0i表示t0时刻收到的卫星i信号对应的发射时间,t1-t0为龄期。
ARTK 定位的异步双差观测模型可表示为

电离层、对流层延迟在基线距离较短时(<10 km)基本一致,在双差模型中可以忽略。上述模型包含基准站与移动站的时间变量,也可作为同步RTK 和TDCP 定位的通用模型。
一般情况下,首先采用单点定位来获得前提参数,包括T0和T1、卫星位置、视线矢量以及移动基准站的近似绝对位置。
在实时导航中,异步双差卫星时钟误差可以通过广播星历中的多项式系数来计算。在无周跳时,可使用两个接收机的延迟同步观测值,通过LAMBDA 方法计算模糊度。因此,观测到的异步双差观测量残差可表示为
假设在f个频率上同时跟踪s+1 颗卫星,单历元异步双差模型可以通过双差模型线性化处理得到双差观测量残差方程矩阵:

其中,V为双差观测量残差;X为基线向量;N为整周模糊度;A为X的系数矩阵;B为N的系数矩阵;L为观测量与站星之间几何距离的差值。
两台接收机共视单频卫星数为(s+1)f个,相应载波相位双差方程数为sf个,需要求解未知量包括基线向量以及sf个整周模糊度,需要增加伪距观测量双差方程改善法方程病态性,提高整周模糊度的解算速度与成功率。
2.2 AR TK/TDCP 方法
对于静态基准站应用,由于基准站位置固定且先验已知,ARTK 可以实现精确的相对定位。而对于移动基准站的情况,如图1 所示,移动基准站在tk-1时刻收集观测数据并将其发送到移动站。移动站接收这些数据,并使用其在tk时的观测值确定基线。异步基线向量是在tk-1时移动基准站与tk时的移动站之间的位置矢量。同步基线向量是在tk时移动基准站与tk时的移动站之间的位置矢量。tk-1到tk时刻,移动基准站存在位置增量,导致同步基线与异步基线不一致。虽然这个问题可以通过增加观测的传输速率来缓解,但是对于高速移动的无人机等移动基准站而言,由此产生的误差仍然是不可接受的。另一方面,随着多星座多频GNSS 的发展,难以高速率、可靠地传输原始观测数据。
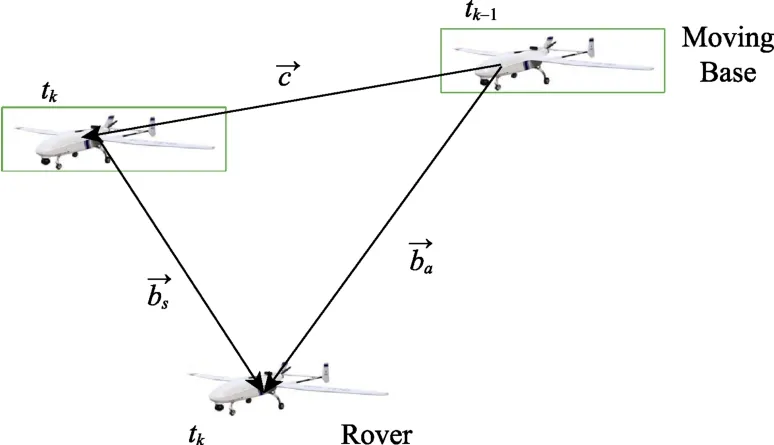
图1 移动基准站下的相对定位Fig.1 Relative positioning on moving base
TDCP 技术适用于以厘米级精度估计延迟期间移动基准站的位置增量,可以综合利用ARTK/TDCP 技术,实现动动高精度相对定位。

在上述模型中,只要无周跳发生,模糊参数就会被消除,否则TDCP 测量将受到破坏,位置增量的准确性将受到影响。
TDCP 观测值残差表示为

经线性化TDCP 定位模型表示为

其中,ui、uj表示卫星i,j的单位方向向量,ΔrT表示移动基准站在t0到t1间的位移增量。利用最小二乘估计可计算TrΔ 。
对于移动基准站,历元间位置增量TrΔ 可使用前一历元和当前历元的载波相位观测值逐历元计算。由于TDCP 模型中不需要初始化模糊度,因此可以在当前历元计算TrΔ ,然后立即以高速率传输到移动站。在移动站,TrΔ 被接收并存储在缓存中。然后,通过累加历元TrΔ 之间的多个历史记录,可以获得龄期内移动基准站的位置增量。
ARTK/TDCP 方法的原理如图 2 所示。ti,ti+1, …是移动基准站传输数据的观测时刻。ti,ti+dt,ti+2dt, …是移动站和移动基准站观测的采样时刻。ΔrA(t,ndt),n=1, 2, …是t时刻移动基准站和t+ndt时刻移动站之间的异步基线。ΔrA(t+mdt,dt),m=0, 1, 2, …是移动基准站从t+mdt到t+(m+1)dt的位置增量。ΔrA/T(t+ndt),n=0, 1, 2, …是ARTK/ TDCP 方法得到的t+ndt时移动基准站和移动站之间的同步基线。具体计算方法如下:
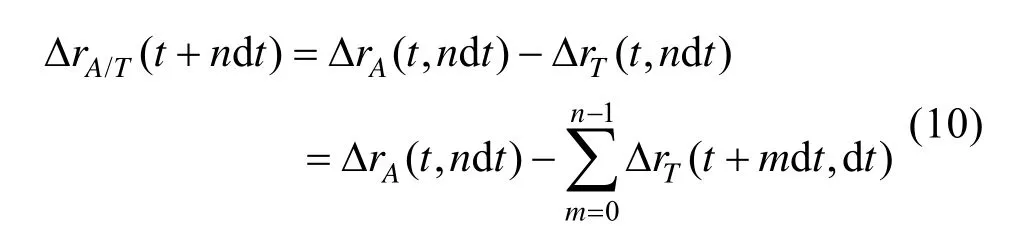
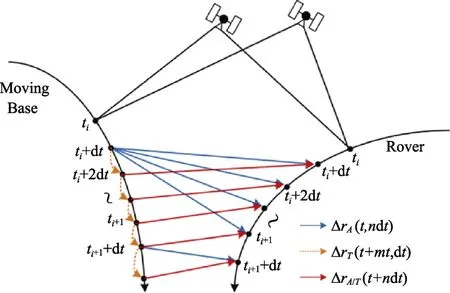
图2 ARTK/TDCP 方法的原理Fig.2 Principle of ARTK/TDCP
上述计算过程中,需要在移动站存储多个移动基准站的历史位移增量,并且可以根据观测数据的最大可能延迟来确定时间窗口长度。从实时实现的角度来看,移动基准站的历史观测可重复用于ARTK 定位。因此,移动基准站的观测数据可以较低的速率传输。只有位置增量需要以更高的速率传输到移动站,以实现低延迟的精确相对定位。TDCP 定位由1 个时间标签和3 个参数的位置增量组成,其大小不会随着卫星和频率的增加而增加。与原始GNSS 观测数据相比,位置增量数据包需要较少的通信信息,因此可以可靠地发送和接收数据包。
2.3 周跳处理
载波相位观测很容易受到周跳问题的影响[9],尤其是在城市环境中。对于ARTK 定位,采用循环滑动检测和修复。可通过TurboEdit 方法,采用M-W 组合和无几何组合进行周跳检测。一旦检测到周跳,可通过额外的模糊参数方法进行修复。标记为周跳的未知模糊度可以使用ARTK 模型中剩余的已知模糊度来解决。如果观测冗余度不足以计算基线向量,则重新初始化解算。
The trajectory parameter equation is in the following
由于TDCP 模型将两个连续历元的载波相位观测值区分开来,因此周跳仅影响当前历元的结果。一旦发现周跳,该卫星的TDCP 观测将被排除在外。如果剩余的正常观测值不够,则通过使用存储的历史位置增量进行预测,获得当前历元的位置增量。如果计算位置存在长时间的数据间隙,则重新进行初始化解算。
3 高精度抗干扰技术
3.1 阵列天线抗干扰原理
阵列天线通过多个阵元信号的合成实现干扰抑制。在复杂的电磁环境下,干扰样式、来源等信息未知,考虑到导航信号强度远低于噪声,可采用功率倒置(Power Inversion,PI)算法,以阵列输出功率最小为最优准则,通过调节各个阵元的加权系数,使最后抗干扰系统输出信号功率最小,实现干扰抑制和信干噪比的提高。具体可表示为
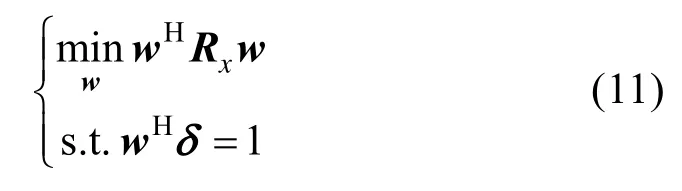
其中,Rx表示输入信号协方差矩阵,δ= [1 0 … 0]。
求解式(11)可得最优解为

设卫星信号为s(t),则卫星信号经过阵列天线抗干扰处理后的输出为

其中,a(θ)表示卫星信号导向矢量。
3.2 数字多波束抗干扰技术
考虑高精度定位需求,抗干扰需要保证卫星信号载波相位的线性特性[10-15]。因此,基于线性约束最小方差(Linearly Constrained Minimum Variance, LCMV)准则对加权矢量施加线性约束条件,以便有效地控制波束响应,使得从期望方向来的信号能以特定的增益与相位通过。同时,约束波束指向方向卫星信号方向、阵列总加权输出信号功率最小,最优权用优化问题表示为
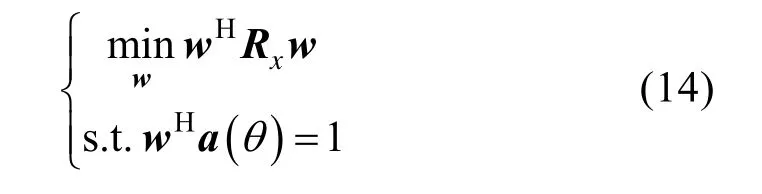
求解上式可得最优解为:
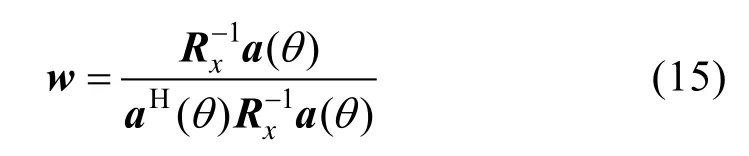
结合公式y(t)=wHa(θ)s(t)可知,卫星信号经过抗干扰处理后,信号相位保持不变。对于不同来向卫星信号具有不同导向矢量,采用数字多波束技术,分别对不同卫星进行抗干扰处理。在提高抗干扰能力的同时,保证卫星信号相位的稳定性,实现高精度抗干扰处理,具体原理如图 3所示。
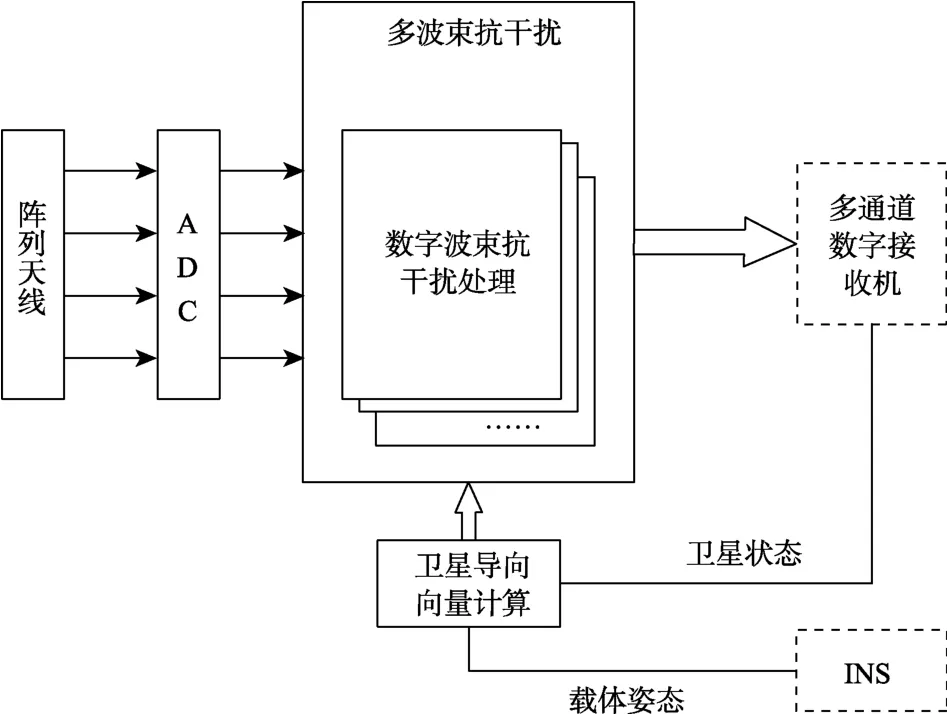
图3 数字多波束抗干扰原理Fig.3 Principle of digital multi-beam anti-interference
阵列天线接收到多路卫星信号后,经模数转换(Analog-to-Digital,ADC)转化为数字信号,针对不同卫星信号使用不同导向向量进行数字波束抗干扰处理,最终实现高精度抗干扰处理。其中,导向向量通过载体姿态信息、卫星状态信息计算得到。
3.3 抗干扰仿真
为分析抗干扰对导航信号影响,对上述抗干扰算法进行仿真,场景设置如下。
阵列类型:4 阵元均匀圆阵;信号强度:导航信号-130 dBm,干扰-30 dBm;干扰来向:方位60°~360°,俯仰10°。
抗干扰前后导航信号频谱如图4 所示。
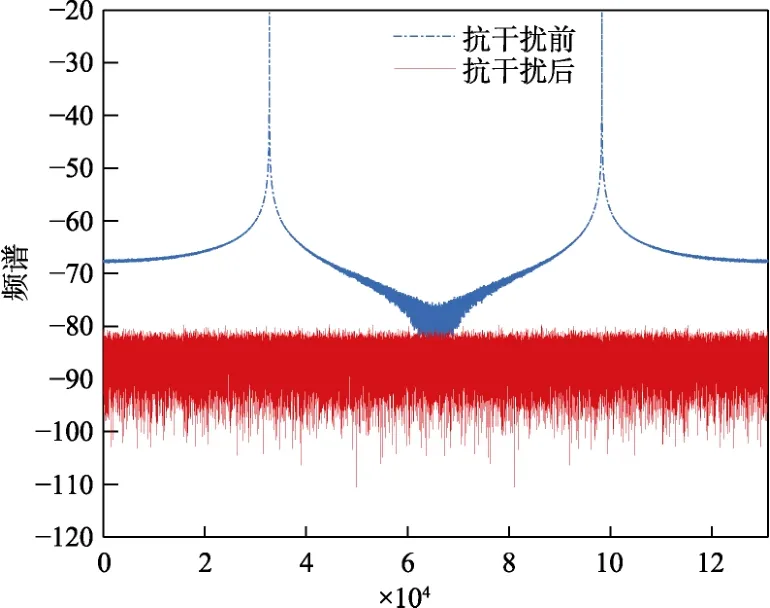
图4 抗干扰前后导航信号频谱Fig.4 Spectrum of navigation signal before and after anti-interference
对于不同来向干扰,以功率倒置算法为对比,LMCV 算法抗干扰前后导航信号相位变化如图5所示。
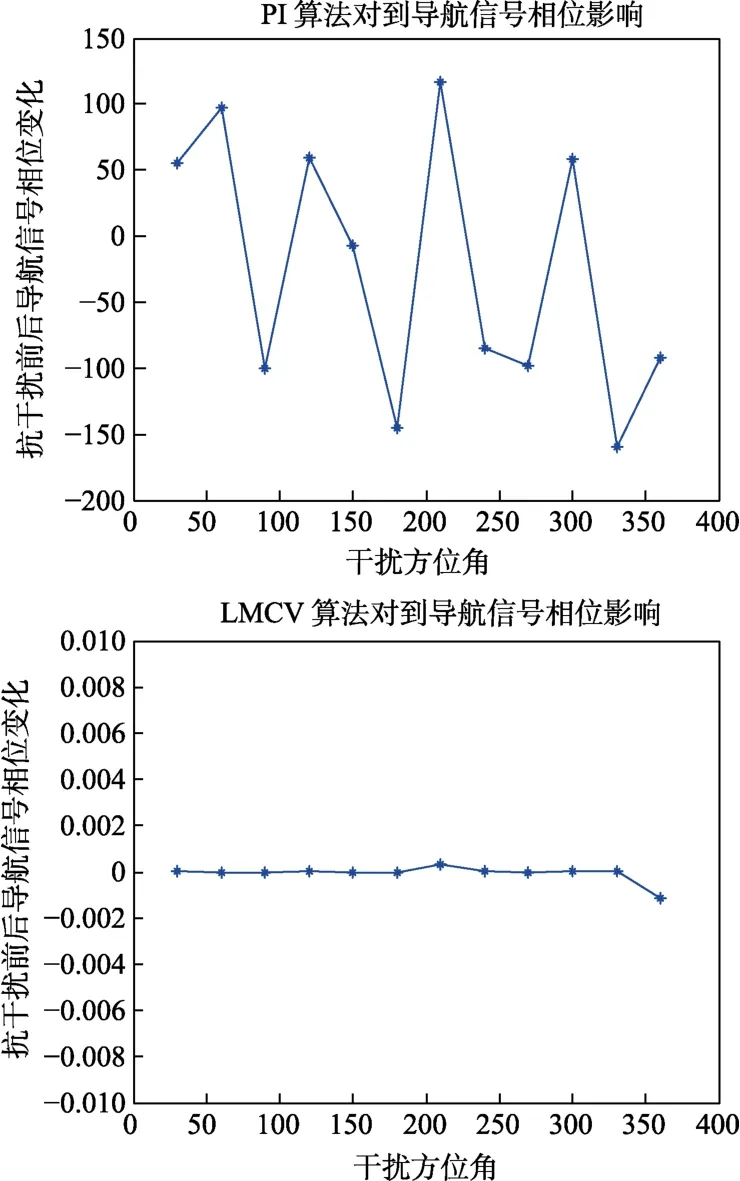
图5 抗干扰前后导航信号相位变化Fig.5 Waveform and phase changes of navigation signal before and after anti-interference
由上述仿真结果可以看出,LMCV 算法经抗干扰处理,可以有效抑制干扰,同时不影响卫星信号相位,可以满足高精度定位需求。
4 动动相对定位试验
4.1 试验环境及方法
为验证动动相对定位性能,设计跑车试验,场景如图6 所示。
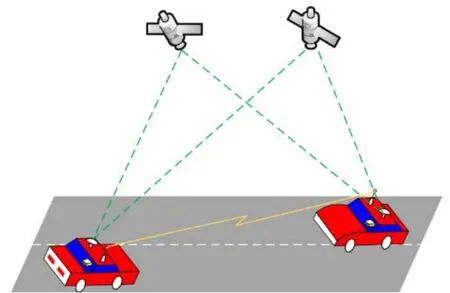
图6 动动跑车试验Fig.6 Dynamic experiment of two cars
具体试验步骤如下:(1)两辆试验车同时进行跑车,分别搭载移动基准站、移动站(包括导 航接收机、通信电台、天线等);(2)架设静态基准站,用于计算移动基准站、移动站准确位置,作为精度统计参考;(3)跑车过程中采集静态基准站、移动基准站、移动站数据,进行精度统计分析。
4.2 试验结果
分别对同步相对定位(无通信延迟,通过事后处理实现)、异步相对定位(存在通信延迟)的结果(包括BDS、GPS 系统)进行精度分析。同步相对定位误差及精度统计结果如图7、表1 所示。异步相对定位(龄期<1s)误差及精度统计结果如图8、表2 所示。

表2 异步相对定位误差及精度统计Table 2 Error and accuracy statistics r of asynchronous relative positioning
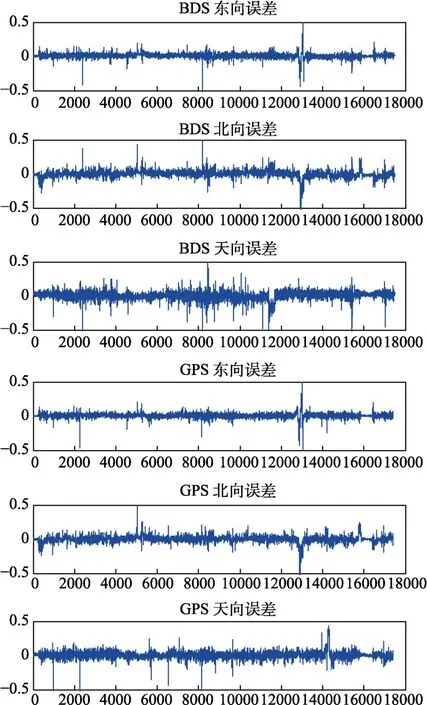
图8 异步相对定位误差Fig.8 Error of asynchronous relative positioning

表1 同步相对定位误差及精度统计Table 1 Error and accuracy statistics of synchronous relative positioning
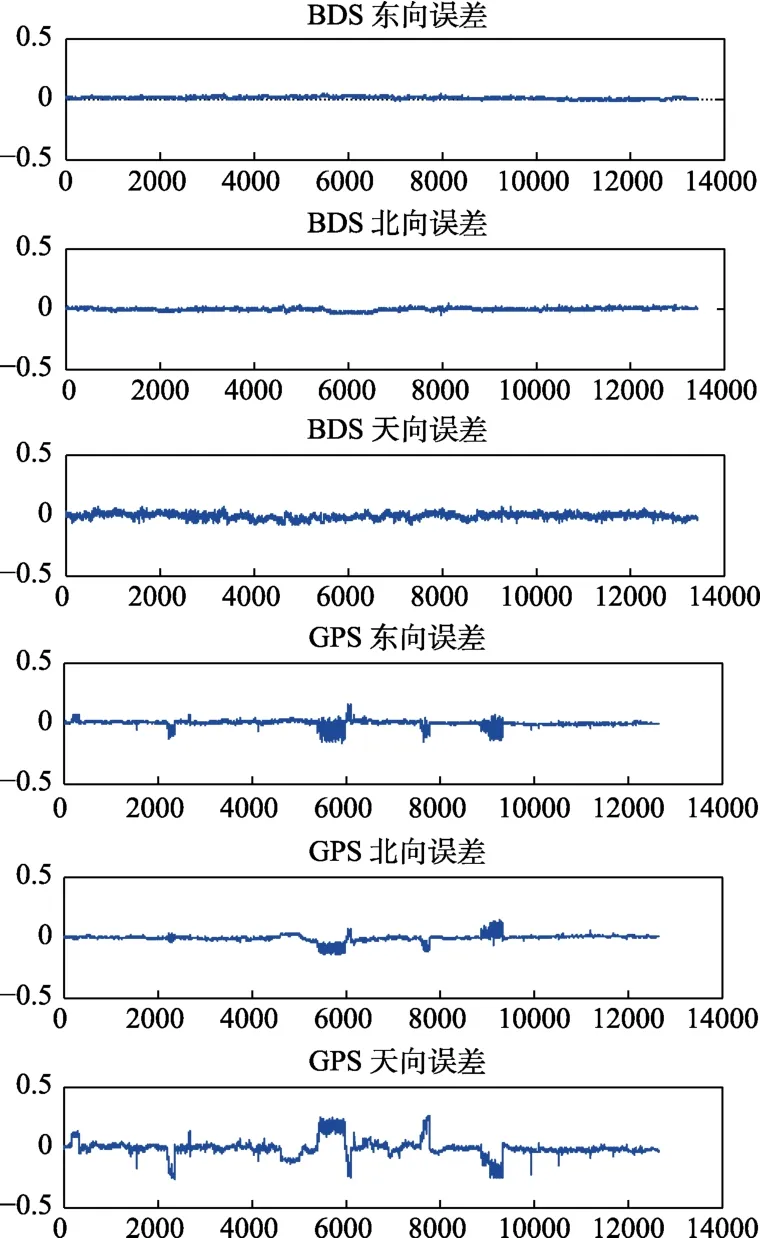
图7 同步相对定位误差Fig.7 Error of synchronous relative positioning
4.3 结果分析
传统静基准RTK 定位误差一般为10 cm,而动动相对定位误差还与龄期、动态性有关,对于车载动态(速度10~30 m/s),1 s 龄期会引起米级误差。采用ARTK/TDCP 方法,由试验结果可以看出,异步相对定位结果与同步相对定位结果(无通信延迟引起的误差)精度相当,可实现10 cm定位精度,满足动态环境下高精度使用需求。
5 结 论
针对无人机编队等应用中的动动相对定位问题,采用ARTK/TDCP 集成方法,可实现高速率和高精度相对定位。试验结果表明,车载动态条件下,相对定位精度可达到厘米量级,满足高精度相对定位需要。同时,为了进一步提高该方法的适应性,采用数字多波束抗干扰技术可实现复杂电磁环境下的高精度定位。在实际应用中,可进一步将相对定位与INS 等结合,提高定位稳定性。
