精密单点定位与双差单历元动态定位的精度分析
2017-01-05王成龙
韩 菲,王成龙
(1.西安坤煜测绘地理信息工程有限公司,陕西 西安 410054;2.北京四维远见信息技术有限公司,北京 100070)
精密单点定位与双差单历元动态定位的精度分析
韩 菲1,王成龙2
(1.西安坤煜测绘地理信息工程有限公司,陕西 西安 410054;2.北京四维远见信息技术有限公司,北京 100070)
为了进一步研究GPS数据处理方法,结合BERRESE5.0软件在单历元解算中的应用,阐述了精密单点动态定位(PPP)和差分动态定位处理模型和解算方法;为验证2种单历元动态定位模型的精度,提出了一套验证方案,并通过对实验数据分析验证,得出了BERNESE5.0软件2种动态数据处理模型的精度。结果表明BERNESE5.0的PPP模型和双差模型在动态数据处理中的应用可达到优于5 cm的定位精度。
BERNESE5.0;精密单点定位;双差定位;单历元动态定位
0 引言
随着全球定位系统(global positioning system,GPS)静态定位技术在地球动力学和大地测量学领域应用的不断深入,GPS动态定位、单历元解算技术在车辆、船舶和飞机的定位和导航、航空遥感平台定位、地震学研究中均得到广泛的应用[1]。
目前被广泛使用的3大高精度GPS数据处理软件均可以进行单历元数据处理:美国麻省理工学院(Massachusetts Institute of Technology,MIT)和美国斯克里普斯海洋研究所(Scripps Institution of Oceanography,SIO)联合开发的GAMIT/GLOBK软件的TRACK运动学分析模块[2]、瑞士伯尔尼大学天文研究所(Astronomy Institute of Bernese University)研发的BERNESE5.0软件的运动学坐标解算模块[3]、美国NASA/Caltech喷气推进实验室研发的GIPSY软件的高精度运动学数据处理方法[4-5]。TRACK和BERNESE都必须选取一个参考站才能进行动态差分定位;GIPSY则需要一个基站提供时钟信息,用来得到相对于基站的坐标;BERNESE5.0的精密单点定位(precise point positioning,PPP)模型也可以进行单站的单历元动态解算[6]。
BERNESE软件是由瑞士伯尔尼大学天文研究所研究开发的全球卫星导航系统(global navigation satellite system,GNSS)——包括格洛纳斯卫星导航系统(GLONASS)数据、GPS数据和卫星激光测距(satellite laser ranging,SLR)——数据处理软件,有专业团队对其进行维护和更新,2004年12月推出了5.0版本,BERNESE5.0功能在BERNESE4.2基础上得到进一步的提升;2013年7月更新至5.2版本。
BERNESE5.0软件可以基于非差、PPP、双差3种模式进行单历元坐标估计。PPP技术为长基线高精度事后实时动态定位的一个新的解决方案[7-8]。BERNESE5.0可以同时对动态站和静态站混合数据进行解算。本论文将研究BERNESE5.0软件基于PPP和双差2种模式的动态数据处理方法及其精度分析。
1 BERNESE5.0的单历元解算
在单历元数据处理中,每个历元的坐标作为未知参数,具有很小的冗余度;使用6~10个单差观测值实现对3个坐标和其他一些未知数如模糊度、对流层等参数的估计:所以在数据预处理阶段,要谨慎地剔除历元,使用尽可能多的数据才能估计出更可靠的未知参数,太少的冗余度也使得粗差探测不可靠。单历元解算对数据的质量十分敏感[5]。
BERNESE5.0推荐使用的单历元数据处理方法:先用PPP解算流动站每个历元的先验坐标,做为双差解算的先验坐标;然后用1个站或者多个站约束的方式解算流动站坐标。
特别注意的是,在数据预处理之后,GPS数据或许不再连续;这会导致在历元时间序列中出现跳变,在这些历元处模糊度也将不连续。其次,在估计单历元坐标时,如果给定的先验方差不合适,也会出现中间历元坐标不连续的情况[9]。
这些问题的解决方法是在周跳、粗差探测、模糊度的解算过程中,尽可能使得参数的设置与数据的质量相匹配。
2 BERNESE5.0动态处理模型
BERNESE5.0软件可以基于非差、PPP、双差3种模式进行单历元坐标估计。在此将详细介绍基于PPP和双差模式的单历元解算方法。
在BERNSESE5.0软件中,推荐使用CODSPP和GPSEST来实现动态坐标的逐历元解算。在CODSPP中激活“Kinematic”的坐标估计模式,然后一套新的坐标将按照每个历元单独估计。坐标估计按照迭代解算方式,同时计算每个坐标解算的残差,通过残差来探测出表现过差的卫星数据;通过迭代直到得到一个可以接受的坐标解,或者残差变得很小。在CODSPP的坐标估计中,只有有钟差值的历元才能得到单历元解算的坐标(标记为“KIN”)。在此也可以首先引入一个动态坐标作为每个历元的先验坐标(只有标示为“KIN”的坐标被使用)[9]。
在MAUPRP(主要是相位的预处理功能)中如果激活“Kinematic”模式,将利用单差数据估计相邻历元的坐标变化量(历元差分解);只有标示为“K”的坐标被估计。对于历元间差分解,因为有4个参数需要估计,所以模型冗余很小,尤其当观测卫星少的时候;这将影响周跳探测的可靠性。如果要改善这种情况,可以引入相对优质的先验坐标[9]。
在GPSEST中,可以对固定站进行约束来实现对流动站的单历元坐标估计:首先引入质量比较好的流动站先验坐标,然后激活动态坐标估计模式,采用逐个历元估计模式;同时,在处理中要选择好固定站和待估计的流动站,同时可以给定固定站合适的约束条件,有2种约束条件模式——可以对平面和高程(北、东、天,分别简称N、E、U)分别给定约束值,也可以对空间直角坐标系的3个方向(X、Y、Z)分别给定约束值[9]。
在BERNESE5.0的动态坐标文件中,“K”表明该坐标的可靠性比价强,说明该历元的观测数据比较充足,平差冗余条件比较多。在动态估计中,在先验坐标文件中没有“K”的历元将被跳过。
3 单历元解算精度验证
为了验证BERNESE5.0软件基于非差和双差数据分别进行单历元动态解算的精度,曾经思考过2种试验方案,分别为:
1)利用实时动态数据,分别使用BERNESE5.0的PPP和差分模式分别进行单历元解算;再用GAMIT/GLOBK软件的TRACK模块或者使用GIPSY解算,然后将它们的结果进行逐历元比较分析。
2)利用静态数据,按照动态数据处理模式,分别使用BERNESE5.0的PPP和差分模式进行单历元动态处理得到2 880个历元坐标;然后用静态模式处理当天该站点的全天数据得到当前时段瞬时历元的坐标为“真值”,将BERNESE5.0的PPP和差分动态坐标与“真值”进行逐历元的比较。
方案1的可行性研究:如果使用GAMIT/GLOBK的TRACK模块或者GIPSY的结果作为参考值,因为其精度也在cm级,所以很难假定其为该点的真实运动轨迹。
方案2的可行性研究:首先在小范围小幅度的运动物体的监测中(比如地震等),其活动幅度在半个波长之内的就没有必要引入新的周跳或者模糊度;其次对卫星的跟踪动态和静态基本是一致的;同时,将静态点24 h静态解坐标作为参考值的“真值”也是很客观、可行的,因为其静态解算精度为mm级别,这个方案更加可靠。
经过认真比较分析,以方案2进行实例验证比较合适。
4 实验与结果分析
4.1 试验数据
本文试验数据采用国际GNSS服务(international GNSS service,IGS)站中3个欧洲站点MATE(Matera)、ONSA(ONSALA)、VILL(Villafranca)的数据为试验数据,这3个站均为国际IGS核心站,它们参与了国际地球参考框架(international terrestrial reference frame,ITRF)的实现,其站点均十分稳定。
试验数据采用2014-04-10(doy100)时段长度23.5 h、采样30 s的数据。接收机分别采用LEICA GRX1200GGPRO、JAVAD TRE-G3TH DELTA、SEPT POLARX4双频接收机,天线采用LEIAT504GG、AOAD/M-B、SEPCHOKE-MC。
3个站的数据均经过TEQC进行质量检验,其多路径MP1和MP2均小于0.4 m。
数据解算将在ITRF2008框架、瞬时历元(doy100)下进行。
4.2 解算和比较模式
1)动态解算。首先成果A采用PPP单历元模式,直接对流动站MATE进行动态处理,得到PPP单历元坐标;然后成果B以PPP得到的单历元坐标作为初始坐标,采用双差单历元模式,将ONSA和VILL 2个站作为固定站,将MATE作为流动站;固定ONSA和VILL来对MATE站进行单历元动态解算,得到双差动态2 880个单历元的坐标。
2)“真值”静态解。成果C(“真值”)添加MATE周边的6个国际IGS站作强约束,采用双差静态解模式解算2014-04-10(doy100)当天23.5 h的MATE数据,从而得到静态解作为该点坐标的“真值”,以供与动态单历元解进行比较。
3)比较方法。将成果A和成果B的每个历元结果均与成果C进行比较,得到2 880个历元的较差;通过差异来分析各自解算精度情况。
4.3 比较结果与分析
BENRESE5.0软件基于PPP和双差的动态定位结果与点位真值比较见图1、图2。
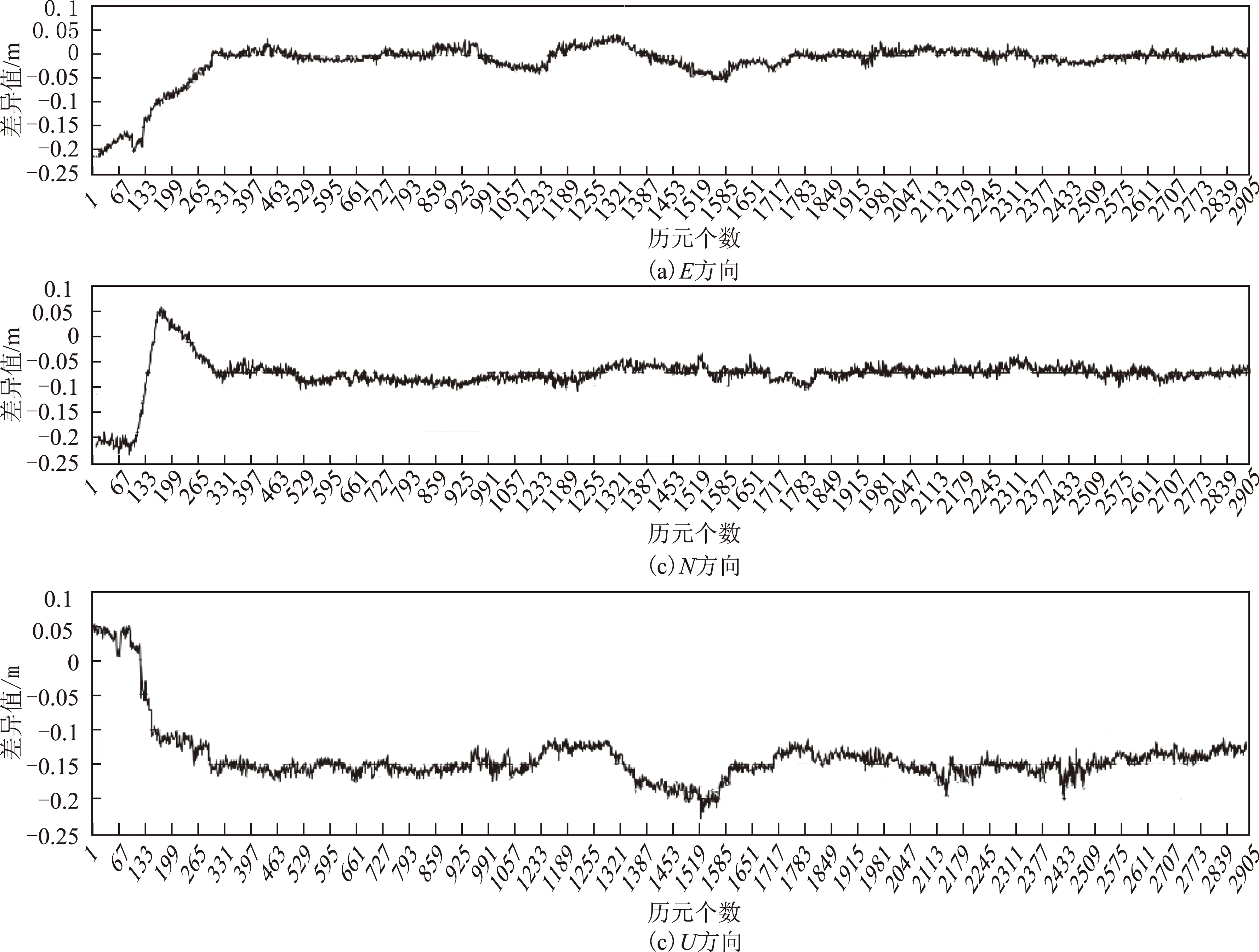
图1 PPP模式的动态定位结果与真值比较(2 880个历元)

图2 双差模式的动态定位结果与真值比较(剔除前250个历元)
通过偏差数据和以上2个序列图可以看出:
1)基于PPP模式的动态数据处理在前230个历元的坐标波动比较大;但呈现收敛趋势。前100个历元收敛速度比较慢,平面(N/E方向)精度从0.22 m逐渐收敛至0.10 m,高程U方向精度从0.42 m逐渐收敛至0.30 m;从第130历元至第230历元的估计精度迅速收敛至0.1 m。从230个历元之后历元估计的精度基本比较稳定,平面和高程精度保持在2.8 cm左右;但在第1 330至第1 678历元之间,U方向产生了0.2 m的波动,分析原因可能为该时段电离层比较活跃,导致U方向精度比较差。
2)基于双差模式的动态数据处理在前200个历元的坐标波动比较大,相对于真值,其平面(N/E方向)精度从0.1 m逐渐收敛,高程U方向精度从0.35 m逐渐收敛。从第200个历元之后精度基本比较稳定,平面N方向最大误差为5 cm,平均误差为1 cm;平面E方向最大误差为7 cm,平均误差为2.6 cm;高程方向最大误差为0.12 m(出现在中午时段),平均误差为2.4 cm;可以看出平面和高程精度基本在2.7 cm左右。但在第1 330至第1 678历元之间,U方向产生了0.1 m的波动,分析原因可能为该时段电离层比较活跃,导致U方向精度比较差。
5 结束语
从试验可以看到BERNESE5.0软件的PPP和双差在动态定位中的可靠性是比较强的。从PPP和双差动态的历元坐标收敛情况来看,2种定位模式具有一致的收敛趋势,随着数据质量的差异,其表现出来的精度趋势也一致;在数据质量比较好的情况下,PPP动态精度可以达到平面2.8 cm、高程3.2 cm,双差动态精度可以达到平面2.2 cm、高程2.7 cm。根据实验情况可以得到结论:基于BERNESE5.0软件的PPP、双差动态定位可以达到优于5 cm的精度。
[1] 付青.多卫星导航系统精密单点定位精度分析[J].全球定位系统,2014,39(6):42-46,55.
[2] Anonymous.Example of the usage of track[EB/OL].[2016-02-15].http://geoweb.mit.edu/~tah/track-example.
[3] BOCK H,DACH R,JGGI A,et al.High-rate GPS clock corrfections from CODE:support of 1 Hz applications[J].Journal of Geodesy,2009,83(11):1083-1094.DOI:10.1007/s00190-009-0326-1.
[4] Jet Propulsion Laboratory California Institute of Technology.GIPSY5.0 release note[EB/OL].(2008-06-02)[2016-02-15].http://gipsy-oasis.jpl.nasa.gov/gipsy/docs/Release-Note-5.0.pdf.
[5] 陈义.精密点定位的基本原理和应用[J].同济大学学报:自然科学版,2006,34 (7):919-923.
[6] 殷海涛,甘卫军,肖根如,等.利用高频GPS技术进行强震地面运动监测的研究进展[J].地球物理学进展,2009,24(6):2012-2019.
[7] 张小红.动态精度单点定位( PPP)的精度分析[J].全球定位系统,2006,31(1):7-11,22.
[8] 宋伟伟,施闯,姚宜斌,等.单频精密单点定位电离层改正方法和定位精度研究[J].武汉大学学报·信息科学版,2009,34(7):778-790.
[9] DACH R,HUGENTOBLER U,FRIDEZ P,et al.Bernese GPS software version5.0[Z].Bern:Astronomical Institute,University of Bern,2007:35-40.
Precision analysis on precise point positioning and dynamic double-difference positioning
HAN Fei1,WANG Chenglong2
(1.Xi'an Sidamaier Surveying Engineering Co.,Ltd.,Xi’an,Shanxi 410054,China;2.Beijing Geo-Vision Tech Co.,Beijing 100070,China)
In order to further study on GPS data processing,combining with the BERNESE5.0,the paper discussed the data-processing models and the resolution used in the dynamic single-epoch positioning and dynamic double-difference processing.For checking the precision of the two models,a set of verification methods was proposed.Experimental result showed that the accuracy of the two dynamic data processing models of BERNESE5.0 could be better than 5 cm.
BERNESE5.0;precise point positioning;double difference;single-epoch dynamic positioning
2016-02-17
韩菲(1981—),男,河南荥阳人,硕士,工程师,研究方向为GPS数据处理及其理论研究。
韩菲,王成龙.精密单点定位与双差单历元动态定位的精度分析[J].导航定位学报,2016,4(4):108-111.(HAN Fei,WANG Chenglong.Precision analysis on precise point positioning and dynamic double-difference positioning[J].Journal of Navigation and Positioning,2016,4(4):108-111.)
10.16547/j.cnki.10-1096.20160421.
P228
A
2095-4999(2016)04-0108-04
