具有电位测量与刚度筛选功能耦合的触觉传感器研究
2021-11-27周子隆
冯 跃,周子隆
(北京理工大学机电学院,北京 100081)
1 引 言
近年来,智能无人系统已成为应用广泛、发展最引人注目的高新技术之一。智能无人系统能够感知周围环境信息,在复杂环境中执行灵活的操作任务,极大地推动了经济发展、社会进步以及军事变革[1]。而传感器技术是无人系统智能化的先决条件,触觉传感技术则是该领域热门研究内容之一[2]。触觉是无人系统实现与环境交互的一种重要媒介。通过安装于末端执行器上的触觉传感器,无人系统不仅可以用来判断是否接触物体,还可以通过物理触摸来获取所需的物理信息,测量接触目标的温度、刚度、纹理、形状和接触力大小等特性,进而识别目标物体[3-5]。
传统触觉传感器依据传感原理的不同主要可以分为电容式、压阻式、热电阻式、电感式、压电式、电磁式和光学等[6-8]。一般而言,电容式、压阻式和压电式具有潜在优越的性能和实用性,因此通常是传感器设计者的首选。其他几种方法可以获得极高的灵敏度和较高的空间分辨率,然而这些技术中的大多数存在有效负载较大、制造昂贵且复杂的问题[9]。相反地,采用电容式、压阻式和压电式触觉传感器能够在保证较宽的工作范围的同时降低成本和功耗。
但是现有的多数触觉传感器仅能获得目标的轮廓与表面形貌,尚不足以有效识别结构属性相近的目标[10]。通过利用目标的电学特性如表面电位,反映物体的电导率,可以进一步提高目标识别准确率[11]。目标结构刚度反映了物体的杨氏模量,是辨识材料的有效依据。然而大多数刚度触觉传感器基本上依靠传感器和物体之间通过压电的压力检测,再结合光学设备的位移检测,对弱力下的微小变形不敏感[12]。
因此,本文提出了一种新型电容式耦合触觉传感器,可以同步识别物体的刚度和表面电位。电容式传感器具有单稳态金属拱顶和驻极体薄膜覆盖的对电极,能够实现刚度区分和表面电位传感。当传感器接触和释放物体时,输出由表面电位和刚度信息组成的耦合电压信号。通过解耦输出波形,本文确定了所提出的传感器测量的电压与物体表面电位之间的关系,以及电压与物体刚度之间的关系。
2 传感探头设计
本文所提出的耦合触觉传感器的测量探头由前端电极、后端电极、基底和一层驻极体薄膜构成(见图1)。传感器的基底为绝缘介质FR4;前端电极为不锈钢(301钢)制弹性拱顶结构,焊接在基底上;后端电极呈圆形,刻蚀在基底上;表面覆有一层驻极体薄膜,驻极体与前端电极之间存在一定宽度的空气间隙。
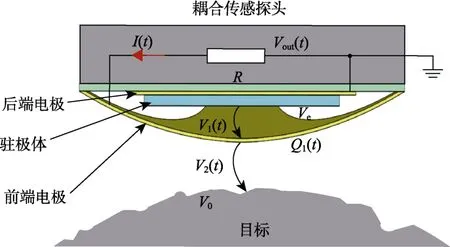
图1 耦合传感探头结构示意图Fig.1 Diagram of coupled sensor probe
驻极体是指能够长期储存空间电荷和偶极电荷的电介质材料,即从时间跨度上来看,它们的电荷衰减时间常数比驻极体形成的周期长得多[13]。本文所用驻极体材料为PTFE(Poly Tetra Fluoroethlene),化学气相沉积在后端电极表面。PTFE具有优异的电荷储存能力[14],能够实现传感器测量时的互感效应;同时,其杨氏模量远小于不锈钢,不会对弹性拱顶结构刚度造成影响。当传感器探头接近目标物体时,由于静电感应,传感器前端产生感应电荷,距离目标物体越近,静电感应效应越强,探头两电极输出电压越高。随后,传感器接触到目标物体,并仍向前运动直至与目标物体接触产生一个电压脉冲。前端电极被物体挡住,物体与电极间产生相互作用力。前端电极为弹性拱顶结构,当其受力达到临界值时,电极产生非线性屈曲,形状发生突变,驻极体层与前端电极间的空气间隙的宽度以较快的速度缩小到无。两电极之间会产生一个较高的电压脉冲。
3 物理模型
3.1 拱顶结构非线性屈曲理论
传感器前端电极结构如图2(a)所示。探头前端电极弹性拱顶结构顶部为球壳形状,由4 个腿支撑。探头前端电极结构可以简化为由4 个腿弹性支撑的轴对称球壳,其力学模型如图2(b)所示。当顶部电极接触物体时,拱顶(帽高为h,腿长为l,拱跨距为Rd、厚度为t,球半径为Rs)在中心集中载荷下变形。利用柱坐标系下改良Föppl- von Kármán 方程[15],可以获得拱顶在中心集中载荷F下的变形,即
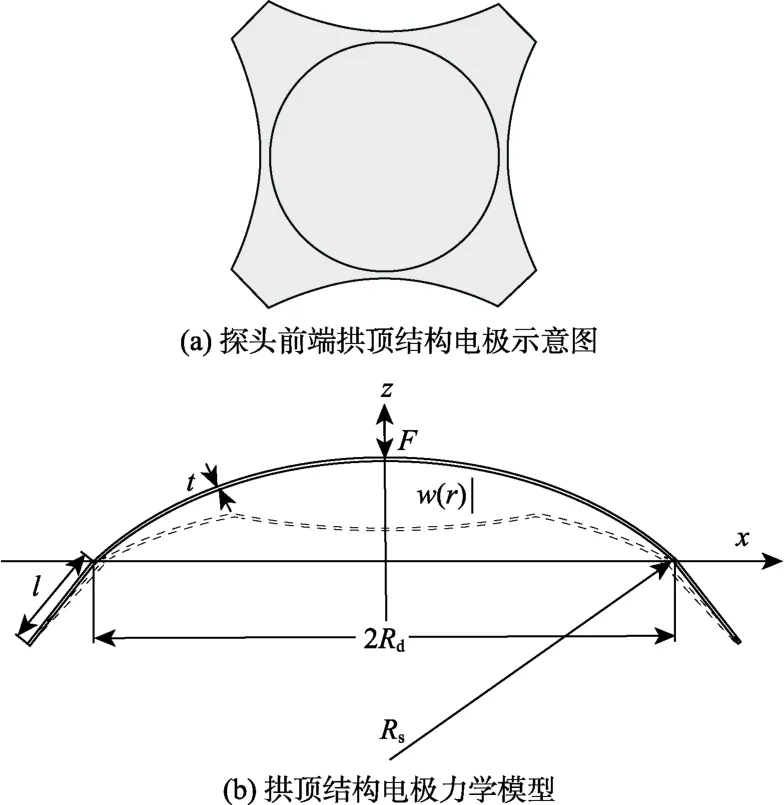
图2 探头结构示意及其力学模型Fig.2 Dome-shaped sensor and its mechanical model
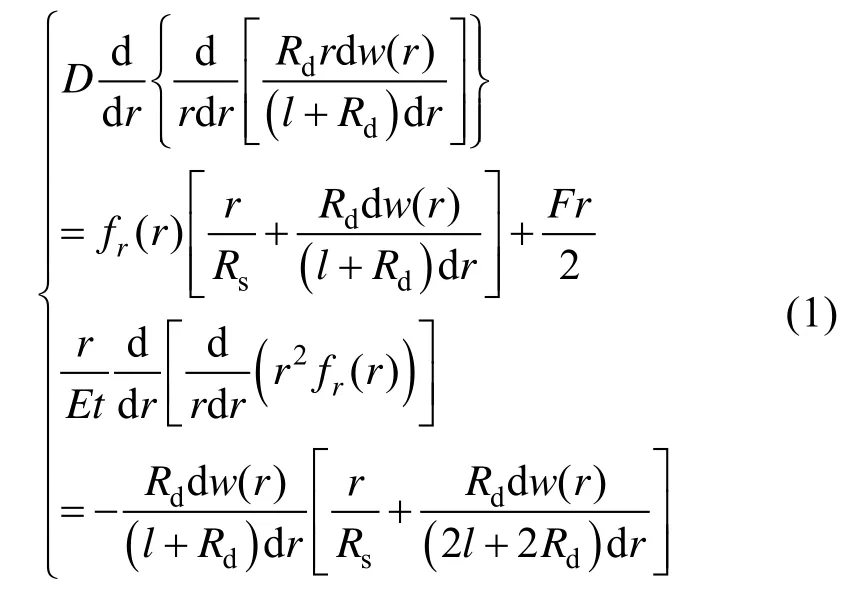
其中,w(r)和Nr(r)分别是壳体拱顶的垂直挠度和径向应力;D是球壳的弯曲刚度,定义为D=Et3/ 12(1-v)。基于胡克定律,拱顶的等效刚度k被定义为集中力F与拱顶中点位移d的比率,k=F/d,其中d=w(0)。
当拱形结构受到力的作用时,会产生形变,随着力的增大,结构上的点的挠度增加,当力达到临界值Fc时,会发生结构失稳位移突变现象,表现为结构上的点从某一位置突跳到另一位置,即屈曲行为。图3 描述了拱顶电极相对于无量纲中心点偏转的无量纲力和刚度响应。随着拱顶中心位移的增加,拱顶的刚度k将首先保持不变,定义为阈值刚度kth,然后缓慢减小。一旦中心挠度接近临界中心位移dc,刚度就会在很窄的距离内显著降低。当中心挠度达到临界值dc时,刚度达到零点,并且发生屈曲行为。对于具有已知结构参数的柔性金属拱顶,临界中心位移dc和阈值刚度kth都已确定。当荷载作用在结构上时,是否发生屈曲取决于结构的挠度。根据胡克定律,在相同的力下,越硬的物体变形越小。如果物体的结构刚度高于拱顶的初始刚度,那么当拱顶发生单稳态动力学时,物体的挠度小于临界位移dc。因此,将压力位移设置为两倍临界位移,可以在无需测量压力和变形的情况下,直接比较物体的刚度和拱顶的刚度。并且单稳态拱顶结构的非线性屈曲无需外部回复力即可恢复至初始状态,非常适用于无法提供外部回复力的触觉传感系统。
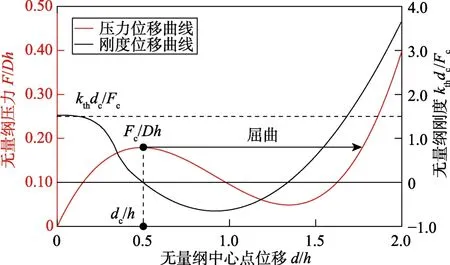
图3 压力位移曲线和刚度-位移曲线Fig.3 Force-displacement and stiffness-displacement curves
3.2 探头耦合传感理论
基于基尔霍夫理论,输出电压Vout(t)、驻极体表面电位Ve和目标物体表面电位V0的关系为

其中,V1(t)和V2(t)分别是驻极体表面与探头前端电极之间的电压及目标物体表面与探头前端电极之间的电压。根据电容公式V=Q/C,输出电压表达式改写为[16]
其中,Q1(t)为探头前端电极感应电荷;R为外接电阻阻值;C1(t)为探头前端电极与目标物体间空气层电容;C2(t)为探头前端电极与驻极体间空气层电容;Ce为驻极体电容。可以看出,输出电压Vout(t)随驻极体表面电位Ve和目标物体表面电位V0增加而呈线性提高。
4 数值仿真结果及分析
4.1 拱顶非线性屈曲行为仿真
为了研究拱跨距对前端拱顶非线性屈曲行为的影响,拱跨距Rd从1.80 mm 增加至2.10 mm,厚度t和球半径Rs分别为2.50 mm 和0.18 mm (图4)。从图4 可以看出,当拱跨距增加时,拱顶中心点临界位移增加,拱顶非线性行为增强,逐渐变为双稳态拱顶结构。双稳态拱顶需要回复力以恢复至初始状态,这是拱顶设计中所避免的。因此通过设置合适的拱顶结构参数可以精准地控制其非线性行为。
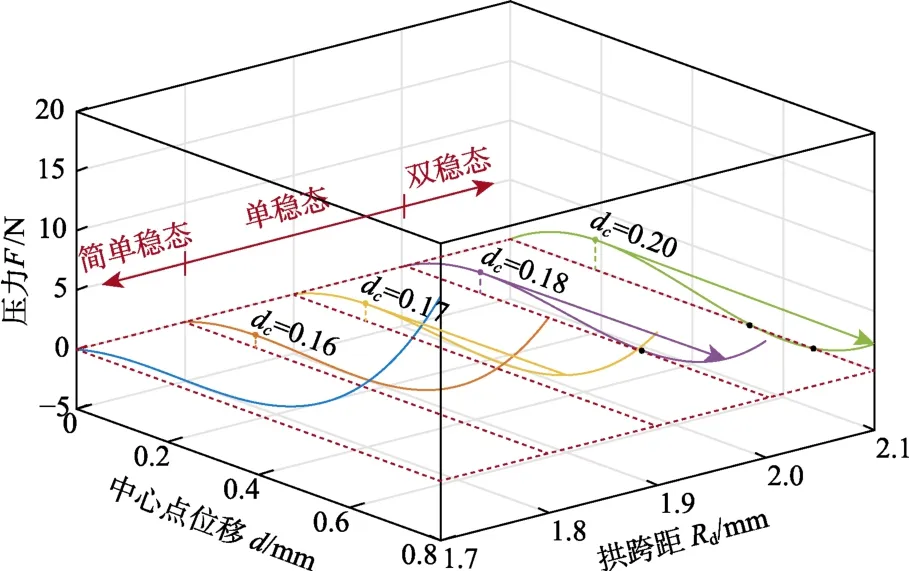
图4 中心点压力与位移曲线随拱跨距的变化Fig.4 Force responses of the mental dome under various basic radiuses
4.2 探头静电感应仿真
当探头尚未接触目标时,给定目标物体表面电位为50 V,探头以2 Hz 的频率在20 mm 的位移范围内来回正弦运动,外接电阻R为10 MΩ,改变目标物体表面电位与运动频率,仿真的探头输出电压峰值变化曲线如图5 所示。可以发现,随着目标物体表面电位的增大,感应电荷越多,探头输出电压的峰值越大;随着运动频率的增加,探头接近目标速度增加,感应电荷变化越快,电压越高。
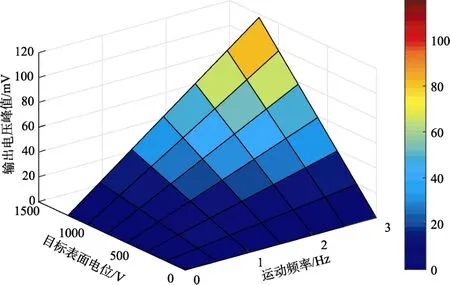
图5 感应电压峰值随目标表面电位与探头运动频率变化Fig.5 The output voltage as a function of the object surface potential and motion frequency
4.3 探头刚度筛选仿真
设驻极体表面电位为-500 V,面积为Rs2,厚度为20 μm,探头振动频率2 Hz,外接电阻R为10 MΩ,探头在不接触目标、接触刚度小于阈值刚度的目标以及接触刚度大于阈值刚度的目标时,电压波形如图6 所示。当探头的前端电极接触到目标物体时,静电感应信号达到峰值,并以此为判据,探头开始进行目标刚度测量。当前端电极的具有弹性的拱顶结构受到力的作用,中心点的形变位移达到临界位移dc时,刚度会快速降为零。此时球形拱顶结构非线性失稳会造成前后两端电极之间空气间隙在短时间内急剧减小,在电阻两端形成一个明显的电压脉冲。计算出前端电极未发生非线性屈曲时的理论的形变电压最大值,并将该形变电压最大值设定为阈值电压,以此判断前端电极是否发生非线性屈曲。当耦合识别探头的前端电极接触带电的目标物体时,根据设定位移(两倍临界位移)继续按压物体。若探头输出的电压峰值未超过阈值电压,表明前端电极未发生非线性屈曲,说明目标物体的刚度小于前端电极的阈值刚度;反之,若电压波形有明显的脉冲,幅值超过阈值电压,表明非线性屈曲发生,说明目标物体的刚度大于前端电极的阈值刚度。
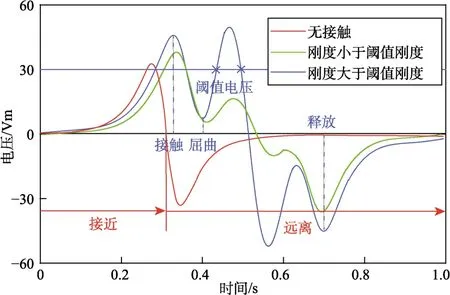
图6 探头输出电压波形Fig.6 The output voltage waveform under different object stiffness
5 实验结果及分析
实验台系统结构图如图7 所示。传感器探头安装在电磁振动台上用于模拟机器人手臂的运动,信号发生器输出正弦信号驱动振动台使传感探头以一定的频率来回运动。目标物体为双边夹紧梁,被固定在实验台的金属板上,保持高度与传感探头一致,其刚度通过改变长度来调节。梁上粘贴有极化驻极体薄膜作用于模拟梁表面电位。当触觉传感器探头往返运动时与目标物体相接触,传感探头输出电压波形经过测量电路滤波与放大处理后,通过ADC 采样输入至计算机。
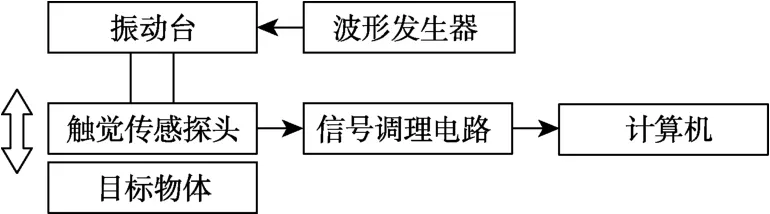
图7 触觉传感器测试系统Fig.7 The test system of tactile sensor
实验选取了3 种不同结构参数的拱顶结构样品,其结构参数如表1 所示。不同的金属圆顶可以设计为不同的阈值刚度。因此,可以制造触觉传感阵列以确定更准确的表面电位与刚度范围。图8 描述了三个金属圆顶试样的理论(虚线)和实验(实线)力位移响应。
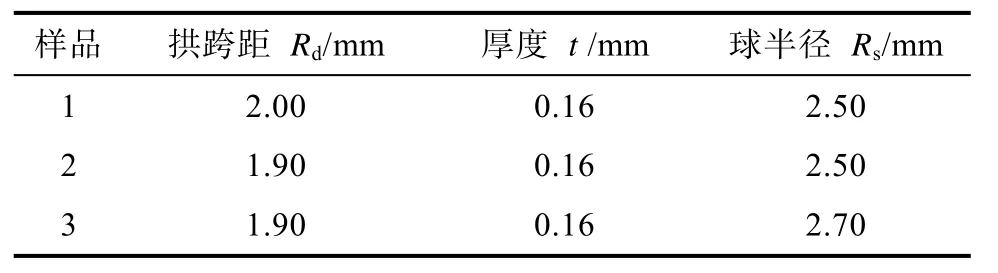
表1 样品三维尺寸Table 1 3-Dimensions of specimens
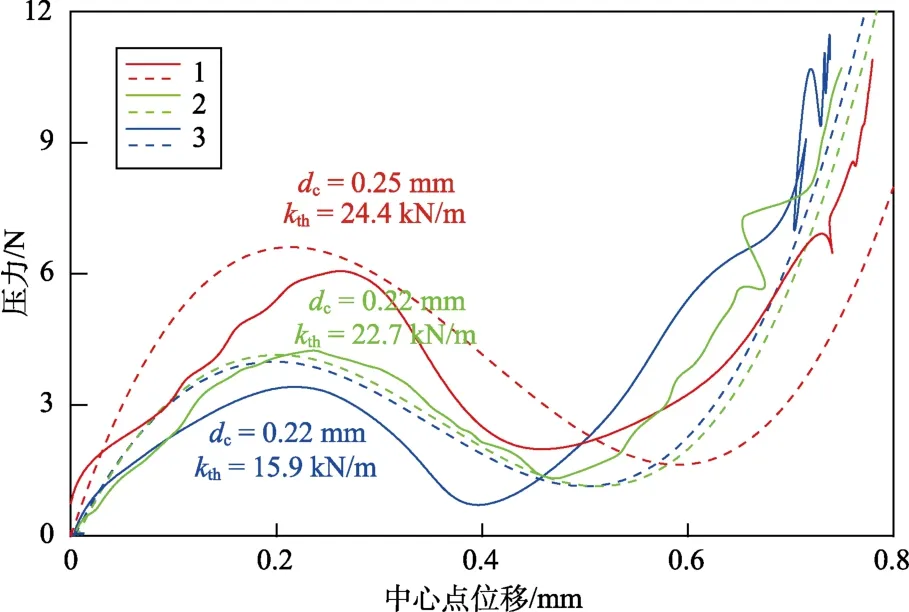
图8 3 个样品力-位移实验与理论曲线Fig.8 The theoretical (dashed lines) and experimental (solid lines) force-displacement curves of three specimens
将3 个样品分别作为3 种探头的前端电极。PTFE 厚度为20 μm,其极化过程如图9 所示。后端电极与前端电极分别接高压源和地,在电极间营造极化偏置电场。电极间的空气间隙在软X 射线辐射下光电离产生正负电荷,其中负电荷在偏置电场作用下注入PTFE 表面,形成驻极体。在10.0 keV 软X 射线辐射下,施加1.0 kV 高压10 min 后,驻极体表面电位为-800V。
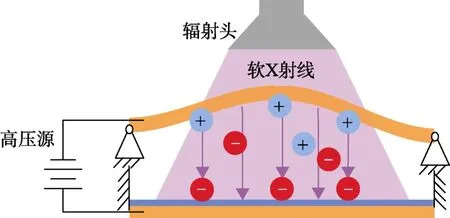
图9 PTFE 软X 射线极化示意图Fig.9 The diagram of soft X-ray charing of PTFE
3 种不同探头在静电感应与刚度筛选过程中的性能如图10 所示,其中目标表面电位从0 变为-1.0kV。结果表明,在传感探头的运动行为不变的情况下,输出电压的最大值与表面电位呈线性正相关,与理论模型非常吻合。图11 展示了整个检测过程中3 个样品的输出电压,其中通过压痕机测得的梁刚度为23.6 kN/m,表面电位设为-1.0 kV。显然,试样的输出电压在释放前有两个负脉冲。由于静电效应,当传感探头接触物体时获得第一个脉冲;由于非线性屈曲,第二个脉冲用于判断物体的刚度阈值。相比之下,探头1 只有一个负脉冲,这意味着没有屈曲;探头2和探头3 有两个负脉冲,这意味发生屈曲。根据传感器输出的电压波形,反演出的表面电位为-950~-900 V,刚度范围为22.7~24.4 kN/m,与设定值接近。

图10 静电感应电压随目标表面电位变化Fig.10 Maximum of output voltage with respect to various surface potentials
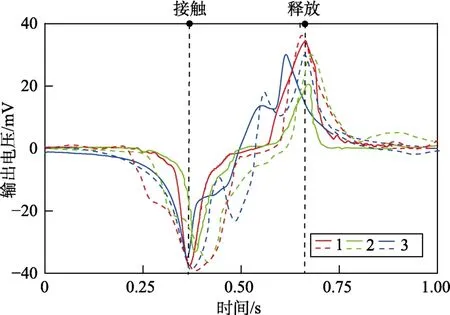
图11 耦合传感器输出波形Fig.11 The measured (solid lines) and theoretical (dashed lines) voltage waveforms from coupled tactile sensors
6 结 论
本文提出了一种能够同时确定物体表面电位 和结构刚度的耦合触觉传感器。该传感器探头由作为前端电极的金属拱顶和作为后端电极表面附有驻极体层的圆形金属片组成。由于带电目标和驻极体静电效应,在两个电极之间输出电压,并根据电压波形反演出物体的表面电位和刚度,本文主要获得了以下研究结论。
(1)研究了传感器探头前端电极弹性拱顶结构的屈曲特性,利用冯卡门大挠度理论推导了拱顶结构在几种载荷作用下中心点的位移公式,对比理论与实验数据,发现理论与实验结果基本吻合,证明了通过改变结构参数控制拱顶结构非线性屈曲行为的可行性。理论上确定了当接触后设定的位移为探头前端电极临界位移的两倍时,可以实现对目标物体刚度的阈值判定。
(2)建立耦合传感理论模型,推导了电压响应理论公式。数值计算结果表明:当传感器不与目标物体接触时,目标物体的表面电位越高,电压响应越强,据此可判断目标物体材料的导电性能;当探头与目标物体接触并且前端电极发生屈曲时,电压响应突增,根据电压变化可判断接触时的相互作用力是否达到临界值,从而判定硬度阈值。
(3)选取了3 种不同探头样品,设计了耦合传感实验。基于理论,对传感器输出电压解算,在目标物体刚度为 23.6 kN/m 且表面电位为-1.0 kV 时,测得表面电位为-950~-900 V,刚度范围为22.7~24.4 kN/m,实现了对目标物体表面的测量与刚度的阈值判定。
