太阳帆板驱动控制器的力学仿真与试验
2021-10-26黄逍遥葛悦李宇张得礼
黄逍遥,葛悦,李宇,张得礼
(1. 南京航空航天大学,江苏 南京 210016; 2. 上海宇航系统工程研究所,上海 201108)
0 引言
太阳帆板驱动控制器是空间飞行器上重要的电子单机,用于实现太阳帆板对日定向功能[1]。在严酷的空间环境中,帆板驱动控制器会长期受到多类型的振动载荷作用,导致器件或电路板性能退化[2],因此对帆板驱动控制器在空间复杂环境条件下的响应行为进行板级仿真和试验非常必要。文献[2]对航电设备的PCB组件进行了实验模态分析来修正有限元仿真模型,并用修正后的模型进行随机振动仿真;文献[3]针对航天电子电路板进行综合环境加速试验方法研究,计算其在随机振动和温度循环下的疲劳寿命;文献[4]对印制电路板进行频率响应分析、随机振动分析和疲劳寿命分析,找到印制电路板的薄弱环节并进行优化设计。
本文以基于国产器件研制的太阳帆板驱动控制器为研究对象,对其建立简化的三维模型和有限元仿真模型,同时进行模态分析、简谐振动分析和随机振动激励下的分析,并针对固有频率较低和振动薄弱环节进行结构优化设计。最后按照《运载器、上面级和航天器试验要求》[5]和《卫星型谱单机试验通用要求》[6]开展产品在简谐振动和随机振动下的试验,验证帆板驱动控制器在空间环境中的力学可靠性。
1 控制器结构概述
太阳帆板驱动控制器解析上位机发送的指令,按照指令控制电机来实现帆板的对日定向功能;同时获取定向机构的位置、电流及其工作状态,反馈至上位机。系统主要包括串口通信模块、存储模块、电平转换模块、H桥驱动模块和AD转换模块。核心主控芯片采用某研究所的30万门FPGA器件BQVR300RH,FPGA程序存储芯片采用国威SM9A86-8MS的PROM器件,其余核心器件VDMOS、AD/DA等均采用国产器件。电路板元器件布局如图1所示。

图1 电路板元器件分布图
2 板级力学分析与优化设计
2.1 建立有限元模型
本文采用ANSYS有限元分析软件进行板级力学仿真。仿真过程包括以下4个步骤:创建三维模型、设置材料力学参数和约束条件、网格划分、施加载荷进行求解。
对电路板建立完整的三维模型非常困难,计算也比较费时。故在能够得到与完整模型相同或相近结果的前提下,对模型进行如下方法的简化[4]:
1)焊点的强度通常较高,难以脱落。另外目前对焊点没有较好的建模方法,故将焊点做省略处理;
2)电容、电阻等小器件较多,会造成计算量大大增加。小器件在电路板上分布较均匀,利用质量等效法将小器件的质量算在基板上;
3)大元器件依据其实际位置和器件高度,进行三维实体单元建模;
4)芯片引脚数量众多,建模工作量非常大。在简化引脚的建模考虑到器件与基板不是简单的面接触关系,因此在引脚位置上设置位移耦合关系,仿真结果可以有效地表现出芯片及引脚对整体结果的相互影响。
基于上述方法得出的电路板三维模型如图2所示,其尺寸为220mm×200mm×1.5mm。

图2 简化后的电路板三维模型
建立电路板的三维模型后,对其设置材料以及材料力学参数。基板使用的材料是玻纤布·环氧树脂无卤型覆铜(FR-4)板[7],它的弹性模量为18GPa,密度为1850kg/m3,泊松比0.28。除了基板之外,对有限元分析影响较大的还有电路板上芯片、接插件、大电容和晶体管等,它们的材料特性如表1所示。

表1 一些组件的材料特性
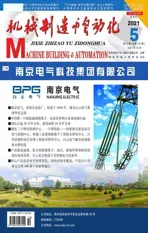
该PCB通过φ3.2螺栓孔与外壳固定。设置所有螺栓孔为约束条件,孔的位置见图1。将三维实体模型选用八节点六面体单元进行离散化[8],划分得到有限元模型的总节点数为235 637,网格数为43 822,如图3所示。
图3 电路板有限元模型
2.2 模态分析
模态分析是计算结构在自由振动时具有的固有频率和固有振型。对于N自由度的振动系统,它在振动时的运动特性为

(1)
令外激励和载荷为0,得到无阻尼自由系统运动方程

(2)
令式(2)的解为
{x}={φ}sinωt
(3)
其中:{φ}为振型;ω为圆频率。将解代入运动方程式(2)得到系统的特征方程为
(K-ω2M){φ}=0
(4)
由式(4)可以求得系统的特征值(固有频率)ωi(i=1,2,…,N)和对应的特征向量(固有振型){φi},从而分析系统的固有振动特性,预估电路板在振动中的共振峰位置。分析结果所得前6阶固有频率如表2所示,模态振型云图如图4所示。

表2 目标PCB模态分析固有频率
图4 模态振型云图
由目标电路板的模态分析结果可以得出,越远离安装固定的部分,这部分的振幅就越大,使得布局在这部分上的某些对振动敏感的器件受到较强的影响。在设计布局时,一般将对振动敏感的器件布置在靠近电路板约束的地方,以提高系统的抗振性能。
2.3 简谐振动分析
简谐振动分析是用来计算简谐振动激励下系统响应的分析方法。对有阻尼和简谐振动激励下的系统运动方程,令式(1)中的{f(t)}={p(ω)}ejωt,得到
(5)
设解{x}的简谐形式表达式为
{x}={u(ω)}ejωt
(6)
其中{u(ω)}为复位移向量。
对式(6)求一阶和二阶导数得:
(7)
(8)
将式(6)-式(8)代入式(5)得
(-ω2M+jωC+K){u(ω)}={p(ω)}
(9)
通过求解耦合矩阵方程,就能计算结构的频率响应。依据《GJB 1027A-2005 运载器、上面级和航天器试验要求》,简谐振动分析采用扫频法,即维持一个或两个振动参数(幅值、速度或加速度)不变,而振动频率在一定范围内往复变化的仿真方法。简谐振动扫描条件按照《Q/RJ356-2013 卫星型谱单机试验通用要求》开展,见表3。根据2.2节模态分析得出的电路板基频大于简谐振动频率范围,因此不会发生共振。

表3 简谐振动扫描仿真条件
在以上简谐振动条件下仿真得到的电路板变形云图如图5所示。

图5 简谐振动仿真变形云图
由仿真结果可知,电路板在简谐振动条件下预估的变形最大为0.045mm,最大应力往往发生在螺栓孔附近,达到8.75MPa,远小于结构的破坏强度。
2.4 随机振动分析
随机振动分析是用来计算随机激励下系统响应的分析方法。外部随机激励通常以功率谱密度函数描述,随机振动响应功率谱Gy(f)计算公式如下:
Gy(f)=|H(f)|2×Gx(f)
(10)
其中:H(f)为系统的频率响应函数;Gx(f)为外部激励功率谱。随机振动分析的条件按照《Q/RJ356-2013 卫星型谱单机试验通用要求》开展,如表4所示。

表4 随机振动仿真条件
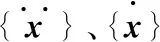
随机振动仿真结果如图6所示,为垂直板面方向上的位移变形量。
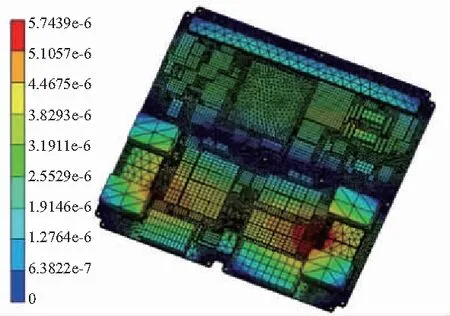
图6 随机振动仿真结果
由仿真结果可以得知,在上述随机振动条件下最大变形值为0.008mm,抗振性能较好。
综上,在简谐振动、随机振动和加速度条件下仿真所得的结果表明,结构的应力和变形相对较小,而且处于弹性范围,因此结构安全是可以保证的。
2.5 优化设计
经过模态分析、简谐振动分析和随机振动分析,得出了该帆板驱动控制器的动态特性。本节针对仿真结果,对电路板进行结构优化设计,提高固有频率和薄弱部位的抗振性能。
电路板的结构优化设计主要从尺寸参数、材料特性和器件布局等方面进行。电路板基板的厚度和弹性模量对固有频率影响较大。将厚度由原先的1.5mm增加到2.0mm,进行模态分析得到的固有频率如表5所示,第1阶固有频率提高了约110Hz,效果显著。还可以通过选用高弹性模量的材料作为基板来提高固有频率。在基板厚度为2.0mm的基础上,将基板材料弹性模量提高到22GPa,得到的固有频率如表6所示,第1阶固有频率提高到了625Hz。

表5 厚度为2.0mm时的固有频率

表6 弹性模量为22GPa时的固有频率
根据简谐振动分析和随机振动分析的结果,薄弱环节在远离约束且有大器件布局的地方。在考虑保留电路板完好电气特性、电磁兼容性的前提下,将大器件分布到电路板边缘,靠近约束的部分,并在器件表面增加一个金属保护套,保护套与外壳通过螺钉连接,如图7所示。

图7 大器件加固方法示意图
对综合优化后的电路板进行模态分析,得到的固有频率如表7所示。

表7 综合优化后电路板的固有频率
最后结果显示,通过对电路板结构的优化改进,大大提高了固有频率。
3 板级力学试验
在进行优化设计后,通过一系列工艺流程制造的板驱动控制器如图8所示,外壳结构通过安装孔与电路板实现机械装配。对帆板驱动控制器开展板级力学性能验证工作,进行简谐振动试验和随机振动试验。

图8 帆板驱动控制器实物图
3.1 试验条件
振动试验系统主要包括振动台、测振传感器、夹具、振动控制器和试件5部分,如图9所示。测振传感器安装在试验样品与夹具联接处,并采用多点平均值控制。

图9 振动试验系统实物图
试验环境初始温度为22.3℃,最终温度22.0℃;初始湿度40.0%RH,最终湿度46.0%RH。试验条件与仿真条件相同。
3.2 试验结果
帆板驱动控制器每项试验前后,对产品主要功能均进行功能测试。经测试,各项试验前后产品功能、性能均正常,整个试验完成后产品功能也均正常。国产器件在帆板驱动控制器产品中应用良好,其试验前后测试值见表8。

表8 试验后产品主要功能测试表 单位:V
4 结语
本文针对基于国产器件研制的太阳帆板驱动控制器建立了三维模型和有限元模型,并在ANSYS有限元分析软件中进行模态分析,然后在模态分析的基础上,开展了空间环境中简谐振动和随机振动激励下的板级仿真分析,并在对结构优化设计后进行相应的试验验证。由仿真和试验结果来看,电路板在各试验条件下的应力和变形相对较小,安全可以保证;优化后的电路板结构固有频率高,可靠性好,并且在整个试验完成后,帆板驱动控制器的功能、性能均正常,因此满足产品在空间环境的正常工作需求。