基于多纹理特征的白酒摘酒酒花图像分类识别
2021-09-17杨静娴任小洪
杨静娴 ,任小洪
(1.四川轻化工大学 人工智能四川省重点实验室,四川宜宾 644000;2.四川轻化工大学 自动化与信息工程学院,四川宜宾 644000)
0 引言
在传统摘酒工艺中,工人需要不断观测在酒甑蒸馏器出酒口接入酒桶时所形成的表面酒花大小形态及其分布,适时进行白酒的分级摘取,这种“看花摘酒”的方法在现代白酒工艺中仍广泛应用。如何实现“看花摘酒”过程的自动化、智能化已成为智能酿造亟需解决的难题。采用视觉传感器获取接酒器(桶)中不断形成的酒花的视频图像,然后通过图像分析处理技术,实时提取白酒摘酒过程中酒花图像的各类特征进行识别分类的智能方法,具有方便快捷、判断依据稳定的优点,是实现大规模智能摘酒的关键技术,对白酒工艺智能化发展有着重要意义[1-3]。
杨静娴等[4]通过OTSU与Canny边缘检测相结合,讨论了白酒摘酒酒花轮廓提取的方法。这种方法能够提取酒花的轮廓信息。在白酒摘酒过程中,轮廓信息中包含的酒花的尺寸、数量信息具有变化不确定性,单一的轮廓信息无法得出确切的酒花分类标准。因此,需要对白酒摘酒酒花图像提取相对平稳的特征值作为摘酒分级的标准。
在白酒摘酒过程中,酒花图像的变化快速,但酒花图像中纹理清晰,不同等级酒花在纹理形态上存在差别。因此,提取酒花的纹理特征能够细致的进行图像的特征描述[5-8]。通过对酒花图像提取不同的纹理特征并定量分析得到分类依据,结合支持向量机(Support Vector Machine,SVM)的方法使酒花识别分类的结果更加准确且有据可依[9-10]。
为此,本文提出基于局部二值模式(Local Binary Patterns,LBP)与灰度共生矩阵(Gray-level co-occurrence matrix,GLCM)的白酒摘酒酒花纹理特征提取方法,构造不同的SVM分类器实现对不同等级酒花图像的分类识别,通过视觉图像方法实现白酒摘酒工艺的智能化转变[11-17]。
1 纹理特征的方法及原理
1.1 局部二值模式(LBP)原理
LBP算法是一种描述像素点之间灰度关系的局部特征的非参数算法。在LBP的传统算法与改进算法中,是通过以定义的窗口中心点像素值为阈值,将相邻任意领域范围的多个像素点像素值与之进行比较,若领域中点像素值大于中心点像素值,则标记为1,反之标记为0。不同的领域信息被标记成不同的二进制数,通常将这些二进制数转换成十进制数,这样便生成了LBP编码值,这些数字可以用来反映图像在这个区域的纹理特征[18-20]。
传统的LBP算法是在3*3的正方形领域范围,中心像素点周围有8个像素点,可以生成8位二进制数,共有256种LBP十进制数码。
式中 (xc、yc)——中心点像素坐标;
ip——相邻点像素灰度值;
ic——中心点像素灰度值;
R——半径;
P——采样点数目。
1.2 LBP的不同模式
1.2.1 旋转不变模式LBP
传统LBP算法的缺点在于只能覆盖固定的一个小范围,不能满足对图像纹理特征描述的需求。为了适应不同程度的纹理特征需求,OJALA等对算法进行改进,将传统的3*3邻域扩展到任意邻域,将方形邻域改进为圆形邻域。改进后的LBP圆形算法在允许以半径为R圆形邻域内有任意多的像素点。一般有以下几种采样模式,为LBP(1,8)、LBP(2,16)、LBP(2,8)等。
LBP(1,8)意为在半径为1的圆形邻域选择8个采样点计算中心像素点的LBP编码值。
对于选定的采样点数目P,传统的LBP算法能输出2p个编码值,在每一个LBP编码值中选取一个围绕中心像素点转动,在多次转动的过程中就会产生多种不同的结果。因此,这些结果中最小的LBP值就被定义为旋转不变LBP值,用ri表示,ROR(x,i)表示对x编码值循环按位右移i次。旋转不变模式LBP一共有36维。

1.2.2 等价模式LBP
为了改进LBP纹理提取维数,OJALA等提出了一种等价LBP算法,通过降维的方法,限制二进制模式从1到0或从0到1的跳变次数为2,重新统计灰度数据。试验证明不属于灰度不变等价LBP特征的占LBP特征的85%~90%,而等价LBP只有58个。所以,等价模式LBP只有58维编码值,实际应用59维编码值,加上的1维编码值代表不是等价LBP的特征向量,用u2表示。这样的特征向量不会丢失任何纹理信息,并且可以减少高频噪声带来的影响。
1.2.3 旋转不变等价模式LBP
LBP算法只是灰度尺度不随任何单一的变化而变化,光照变化基本不会对特征描述产生影响,但是图像旋转会对LBP的值产生影响。基于这一特点,MAENPAA等在旋转不变模式LBP算法基础上提出了旋转不变等价模式LBP算法,此算法通过不断旋转圆形领域得到一系列初始定义的LBP值,取其中最小的值作为该像素点的LBP值,LBP模式在此时降为36维,并在此基础上控制跳变次数为2,再次重新统计灰度数据。此时旋转不变等价模式LBP只有10维LBP参量,用riu2表示。

1.3 灰度共生矩阵
基于统计的纹理特征方法是利用像素及其周围空间领域的灰度进行纹理特征统计,方法可以统计像素的一阶、二阶以及更高阶的特征。此统计方法中,最为经典的便是灰度共生矩阵,是对特定方向、特定距离的量像素具有特定的灰度情况进行统计得到。
GLCM 中对方向的取值一般为 0°、45°、90°、135°,d 为中心像元,取值一般为 1、2、3、4 等。通过对4个方向求出不同的特征值再进行求均值计算得到灰度共生矩阵各参数。灰度共生矩阵的阶数与图像灰度值的阶数相同,当灰度图像灰度阶数为N时,灰度共生矩阵为N*N的矩阵。通过灰度共生矩阵方法可以得到不同的特征参数,其中最有代表性的特征参数是能量(Angular Second Moment,ASM)、 对 比 度(Contrast,CON)、 熵(Entropy,ENT)、相关性(Correlation,COR)和逆差 矩(Inverse Different Moment,IDM)[21-25]。 各表达式分别:
(1)能量是对图像纹理灰度变化的度量,反映图像灰度分布均匀程度和纹理粗细程度。能量值越大,表示图像纹理变化越均匀和规则;能量值越小,表示纹理变化越复杂。

(2)对比度是灰度共生矩阵主对角线附近的惯性矩,能够体现矩阵中的值的分布特点,反映了图像中各个部分纹理的清晰度和纹理沟纹的深浅度。

(3)熵反映了图像纹理的随机性,熵值与能量值相反,当纹理越均匀和规则时,熵值越小;纹理越复杂时,熵值越大,见式(3)。
(4)相关度反映了图像局部的灰度相关性,体现了灰度共生矩阵元素在行或列方向上的相似程度,当矩阵中元素分布均匀时,相关度就越大;元素分布分散时,相关度越小,见式(4)。
(5)逆差矩反映图像纹理的同质性,对图像局部纹理变化的大小进行度量。不同区域间纹理变化少,纹理非常均匀时,逆差矩值越大(式5)。
2 酒花图像采集以及纹理特征提取
在白酒摘酒过程中,传统摘酒工艺一般将酒花分为以下3类,见表1。在不同的白酒酿造厂中,对白酒分级为区间范围,没有统一的标准。以下白酒酒花分类以及酒度以进行数据采集的白酒厂为例。

表1 白酒酒花分类Tab.1 Classification of liquor hops 单位:(%)
2.1 试验数据采集
通过在宜宾某传统工艺白酒酿造厂进行白酒摘酒图像采集,经过酿酒师傅的指导,分别获取白酒摘酒过程中各段酒花的原始数据。通过人工分割视频的方法,在酒花差别较明显的3段酒的中间部分分别进行数据采集,获取大清花、小清花、油花3种白酒摘酒类别的试验图像各74张,共222张酒花图片,并进行图像预处理。将可能产生影响的大部分背景通过选取感兴趣区域(Region of Interest,ROI)进行试验预处理,保存大部分酒花图像进行纹理特征提取以及图像分类识别。其中3类酒花各60张作为训练样本,各14张作为测试样本。选取3类酒花试验图像各1张,如图1所示。

图1 白酒酒花试验数据Fig.1 Liquor hops experimental data
大清花与小清花阶段的白酒出酒量大于油花阶段的出酒量,在这部分中产生的图像差异是普遍现象。对实际摘酒过程中进行酒花图像采集时,当固定相机位置与光照角度不同时,会造成酒花图像中部分的背景不同。因此在进行酒花分析时,将这部分的差异作为酒花图像分析中的正常差异。
2.2 LBP特征提取
LBP进行图像特征提取具体分为两步:第一步是图像灰度化,第二步是对编码值进行统计。在本文中,针对已经介绍的3种LBP方法进行特征值提取,分别是旋转不变模式LBP、等价模式LBP和旋转不变等价模式LBP。
分别对白酒摘酒过程中的大清花、小清花、油花图像进行3种模式LBP编码值统计得到以下各类酒花的3种LBP特征图,如图2所示。

图2 LBP特征图Fig.2 LBP characteristic diagram
在图2的各LBP特征图中,x轴为LBP编码值,y轴表示归一化后各不同编码值出现的频次,次数的总和是图像的张数。通过分别对比在不同LBP模式中大清花、小清花、油花的特征图可以得出,在等价模式LBP特征图中,特征编码进行归一化后的值大多都低于0.2,没有出现大范围值偏大。即相比于旋转不变模式LBP与旋转不变等价模式LBP,等价模式LBP的特征提取效率更高。
2.3 GLCM特征提取
在使用GLCM进行纹理特征提取时,首先将图像进行灰度化处理,然后进行灰度级量化,选择参数方向分别为 0°、45°、90°、135°,步距均为 1,分别对能量、对比度、熵、相关性和逆差矩进行特征值计算,最后对4个角度的值进行均值计算得到分类算法的输入矩阵。
在试验中,3类酒花的训练样本各60个。分别对各个样本进行特征值计算,并将训练类3类酒花样本在每特征值的数据进行比较对比,如图3所示。
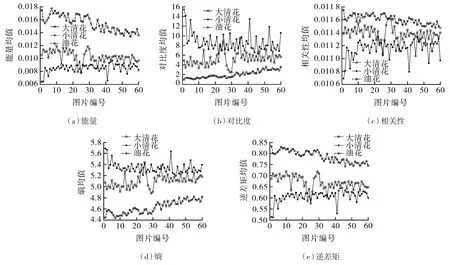
图3 GLCM特征值参数对比Fig.3 Comparison of GLCM feature value parameters
通过特征值参数图像对比可以清晰地看出,3类酒花的能量、对比度、熵、相关性和逆差矩的特征值、均值存在比较清晰的差别,故灰度共生矩阵的特征值均值适合作为SVM分类标准。
3 基于支持向量机的白酒摘酒酒花分类识别
本文采用支持向量机(SVM)作为酒花分类识别的分类器。酒花分为3类,采用一对多分类,构造出两个分类器,先用分类器1将大清花与小清花、油花进行分类,再用分类器2将小清花与油花进行分类。分类器核函数使用了3种进行对比,分别是线性核(Linear Kernel)、多项式核(Polynomial Kernel)和径向基核函数(Radial Basis Function),并进行3种分类结果的对比。
在试验中分别通过LBP和GLCM纹理特征进行酒花分类。对3类共180张酒花图片进行纹理特征提取后分类训练,再对42张测试图片进行分类并进行准确率的计算。
对LBP(1,8)3种算法提取的纹理特征均进行SVM分类得到以下识别结果,如表2所示。
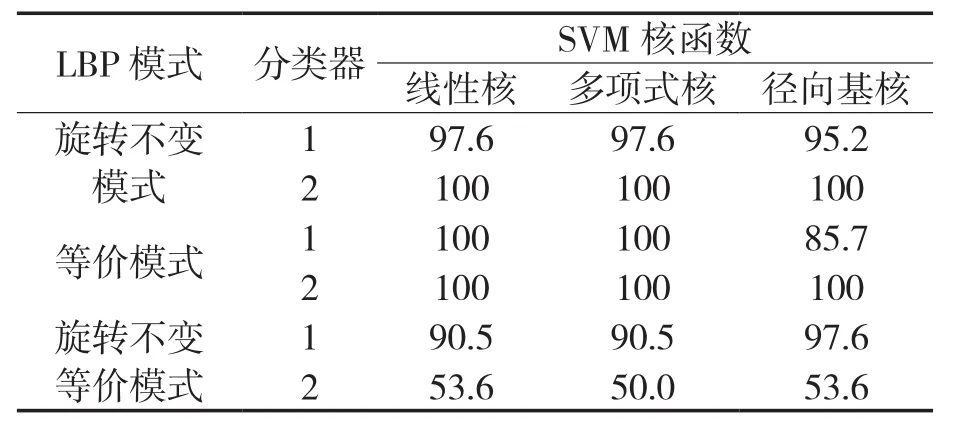
表2 LBP特征提取分类结果Tab.2 LBP feature extraction and classification results 单位:(%)
通过对比可得,在对不同LBP模式下所得特征进行分类时,采用旋转不变模式LBP与等价模式LBP进行分类效果较好,SVM核函数为线性核与多项式核时对3类酒花的分辨率达到95%以上,等价模式LBP达到了100%。这与之前关于LBP特征图的分析结果一致,等价模式LBP对白酒图像特征描述更加细致,能够得到很好的分类准确率。
对GLCM纹理特征提取出的5个特征值分别采用单个和多个特征作为SVM分类器的输入进行分类,得到以下分类结果,如表3所示。

表3 GLCM特征提取分类结果Tab.3 GLCM feature extraction and classification results 单位:(%)
通过不同试验对比可得,选择不同的SVM核函数与特征组合方式对白酒酒花分类准确率会产生不同程度的影响。在选择单一的特征值作为分类器输入时,分类率的准确率并不稳定,且普遍较低。当核函数为线性核函数时,单一特征分类率均较低,增加特征值数目进行组合,其最高分类率也只能达到90.5%;当核函数为多项式时,采用两种及以上特征作为输入时,分类率均高于95%,在特征数目变多时,出现部分分类率下降,但基本保持在95%以上;当核函数为径向基核函数时,选取除单一相关性以外的不同的特征组合均能得到95%以上的分类率,特征数目越多,得到的分类准确率也越高,试验中分类率可以达到100%,但存在不稳定性。
将LBP与GLCM纹理特征提取进行特征级融合进行SVM分类[26-30]。根据对LBP纹理特征的对比以及分类结果的分析,在LBP+GLCM特征分类试验中选取等价模式LBP与GLCM特征值进行融合处理,得到不同的矩阵作为SVM分类器的输入,试验中对核函数的选择也为3种,试验结果如表4所示。

表4 LBP+GLCM特征提取分类结果Tab.4 LBP+GLCM features extraction and classification results 单位:(%)
通过对比 LBP、GLCM、LBP+GLCM 3种方法可得,LBP选择等价模式,GLCM选择两种特征值、SVM核函数选择多项式核函数分类准确率能够得到97%以上。LBP+GLCM能改进在选取单个或多个GLCM特征值组合时的分类率,准确率均有上升,在核函数选取为线性核函数和多项数核函数时,达到了100%的分类准确率。因此,对LBP与GLCM纹理特征进行特征级融合进行分类效果最好,且分类效果稳定性最高。
4 结语
本文提出的白酒摘酒特征提取以及分类算法,利用LBP与GLCM相结合,提取多个特征值并进行特征级融合,采用支持向量机方法,实现了在白酒摘酒过程中对3类酒花的分类。试验结果表明,通过白酒摘酒酒花图像对白酒摘酒过程进行分析的方法是可行的,具有较好的稳定性与准确性,能够得到较高分类准确率。在后续的研究中,可以选取不同的特征提取方法以及不同算法的分类器进行分类研究,对比选取出最佳的白酒摘酒酒花的分类方法,利用其实现的特征数据分类,设计出控制系统,利用机器视觉进行酒花分类和白酒摘酒分级。从而实现白酒摘酒的自动化和智能化。
