基于粗糙集AROD算法的航路交叉点容量预测
2021-07-20朱代武马琳辉
刘 豪,朱代武,马琳辉
(中国民用航空飞行学院a.空中交通管理学院;b.图书馆,四川 广汉618300)
0 引言
在空域网络规划研究中,航路交叉点的识别与容量评估是其中较为重要的一环。由于所有的航路设备和航路点都有精度限制,因此航路交叉点容量的预测存在误差[1],改进航路交叉点容量预测的算法是提高预测精准度的重要方法之一。胡明华[2]在其出版的专著中,对较早基于进近终端流量考察建立的交叉点数据分析模型进行了详细阐述。2012年,王晓晨[3]在分析原有航路容量模型的基础上,考虑了输入航路对航路容量的影响。但上述研究方法较早,不能彻底有效解决近几年因航空器数量剧增所带来的航路交叉点冲突问题。因此,在前述研究的基础上对航路的交叉点进行多层次、多因素的分析,并通过模拟仿真建立一套能有效缓解航路交叉点拥堵的优化模型是解决问题的方法之一。
1 航路交叉点容量模型构建


采用类似文献[4]的建模方法,假设航空器1、2处于S1高度层,航空器3、4处于S2高度层。令航空器1上升高度,以β角度爬升到S2高度层。在航空器1到达S2高度层后,航空器3从S2高度层以γ角度爬升,上升到S3高度层。B1为航空器对头相遇时所需的最小安全间隔,B2为航空器之间的侧向间隔。t1为航空器1从S1爬升到S2高度层所需的时间,t2为航空器3从S2高度层爬升到S3高度层所需的时间。x1、x2、x3和x4分别为各航路参考位置入口点到交叉点的距离。
此外,还应满足如下条件

(d1-vs11cosβt1-vs11t2)2+(d3-2vs31cosβt1-vs31cosγt2)2-

设航路的容量分别为C1、C2、C3和C4,Δd为间隔裕度,有

2 基于粗糙集AROD算法在航路交叉点的应用
基于信息熵的离群点检测AROD算法,可将多维数据进行主要因素和次要因素的属性分类,并能够在较短时间作权重赋值分析。而基于可变精度粗糙集的风险识别方法具有较好的兼容度,适合于实际数据分析[5]。因此将粗糙集和AROD算法结合起来,能够有效提高拟合效率,缩短运行时间。
设O={A,B}为给定的数据集合,A={a1,a2,…,an},n为所考察航路航线的个数,B={b1,b2,…,bm},m为航路航线属性中考察的对象数目,离群点数据集合设为Ou={ou1,ou2,…,ouk},k为离群点的个数。离群点代表在航路中大于阀值W(a)的属性参数值,设其对应的正常集为Onor={O-Ou}。
因航路易受到通信、导航、监视等诸多因素影响,使得航路精确性远小于理论精度要求,因此通过对航路属性进行信息熵评定是一个很好的方法。用aij来表示ai的第j个属性值,取vij来表示vi的第j个属性值。
min(aij)=min(aij|i∈(1,2,…,n)) (13)
max(aij)=max(aij|i∈(1,2,…,n)) (14)
min(vij)=min(vij|i∈(1,2,…,n)) (15)
max(vij)=max(vij|i∈(1,2,…,n)) (16)
设E(a)={E(a1),E(a2),…,E(am)}为航路属性的信息熵集合,则属性熵和为
用熵均值进行航路属性划分,表示为
根据所得到的航路参数,计算各航路航线直接的加权距离di(Oi,Oj,E),得到该航路交叉点的离群度,并按照降序进行排列,则前k个离群点的距离为
在保证上述属性评估准确的前提下,通过计算航路航线数据对象的隶属大小,从而确定其对应的权重,其参数如表1所示。
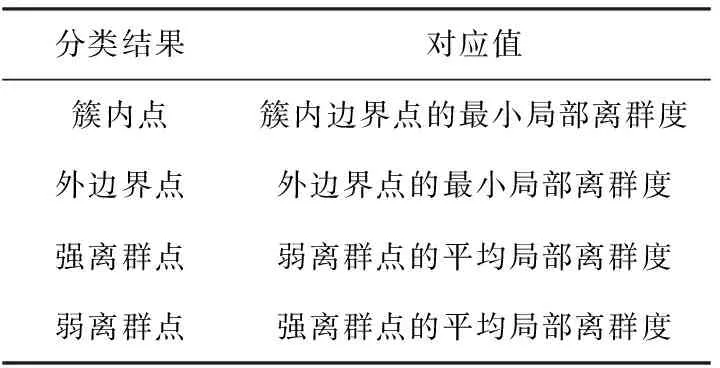
表1 数据对象参数表
根据表1,利用梯形隶属对象在进行分配,表示为
式中:u(Oi)为航路属性对象在此综合评估体系中的隶属度;Oi为航路属性数据i的局部离群度;Br和Bl为航路区间的临界评估值。
同理,弱离群和强离群按照梯形隶属度函数,可表示为
利用层次分析法(AHP)得到上述航路航线中的指标权重,结合上诉航路属性指标函数,航路指标所处相对综合指标的基本概率定义为
3 仿真分析
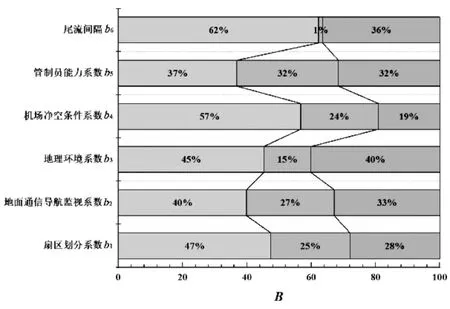
在仿真分析中,航路指标体系中主要考察扇区划分系数b1、地面通信导航监视能力系数b2、地理环境系数b3、机场净空条件系数b4、管制员能力系数b5以及尾流间隔系数b6。基于中国民航CCAR运行划分标准和相关规定,航空器对头穿越的间隔至少为50 km,为使交叉点容量最大化取B1为50 km,侧向间隔B2为25 km。巡航时航空器速度一般为900 km/h,穿越高度层时,飞机的爬升角为30°,航空器之间的运行间隔为40 km[6-7]。在交叉点附近选取航路作为研究对象,为简化计算取x1、x2、x3、x4均为100 km。假设该扇区划分系数b1=5,地面通信导航监视能力系数b2=5,地理环境系数b3=5,机场净空条件系数b4=5,管制员能力系数b5=5以及尾流间隔系数b6=5。
用AHP对b1、b2、b3、b4、b5和b6进行航路因子权重分析,横向权重分析结果如图3所示。图3中左侧为数据对象在簇内点的概率,中间为数据对象在离群点的概率,右侧为数据对象在边界点的概率。传统交叉点容量预测是对簇内点、离群点及边界点进行简单几何平均,即各占该因子属性的1/3。通过对航路因子进行梯度隶属度分析,扇区划分系数b1和机场净空条件b4边界内(簇内点及边界点)的概率为0.72和0.81,传统航路预测方法在边界内(簇内点及边界点)的概率为0.66和0.66。可知,改进后的航路因子在航路交叉点容量预测中的安全阀值更高,能在特定环境中增加容量裕度。
基于粗糙集的AROD算法需要采用MATLAB软件结合QT4的算法进行仿真模拟研究。在上述条件下,用MATLAB对已建立的航路交叉点模型进行计算,求出航路交叉点总体容量为12.25架。而利用基于粗糙集的AROD算法航路交叉点模型进行计算,航路交叉点总体容量为13.37架。利用MATLAB软件进行AROD算法及基于粗糙集AROD算法的航路计算,结果示于图4。由图4可知,粗糙集AROD算法在适应度上高于传统AROD算法,表明粗糙集AROD算法能用于有效预测航路交叉点容量。
4 结论
基于粗糙集AROD算法提出了航路交叉点容量预测模型,根据实际航路及航路交叉点,对模型进行仿
真计算。通过对航路指标体系中主要考察扇区划分系数、地面通信导航监视能力系数、地理环境系数、机场净空条件系数、管制员能力系数及尾流间隔系数进行属性划分,可实现多维属性上在各区间的隶属度的数据分析。结果表明,粗糙集AROD算法优于传统AROD算法,能用于有效预测航路交叉点容量。
