基于套索传动的五指灵巧手设计与主从控制
2021-05-06徐志刚赵志亮
尹 猛 徐志刚 赵志亮,4 韩 伟,4
1.中国科学院沈阳自动化研究所机器人学国家重点实验室,沈阳,110016 2.中国科学院机器人与智能制造创新研究院,沈阳,110016 3.中国科学院大学沈阳自动化研究所,沈阳,110016 4.东北大学机械工程与自动化学院,沈阳,110819
0 引言
灵巧手与人手功能相似,可以实现类似人手的抓握功能,自问世以来,受到了各研究机构的高度重视[1],尤其是具有高度灵活性的灵巧手已成为机器人研究的热点之一。仿人多指灵巧手可以作为工业领域的末端执行器,也可以作为残疾人的假肢,还可以在太空、深海、核电站等危险领域代替人手实现精准操作,具有重要的社会应用价值。
根据驱动方式的不同,灵巧手可分为电机驱动、气动驱动、液压驱动和功能材料驱动等,其中电机驱动方式较为常见。
Shadow手[2]为气动驱动的代表,具有5个手指,有24个自由度,其中20个气动驱动,4个欠驱动。它的驱动来源于一种叫做“空气肌肉”的气动装置,并且将驱动部分集成放置于前臂,手指的运动更像人手。气动空气肌肉价格较低、对环境要求低,但刚度和动态特性都较差。SCHULZ等[3-4]将液压驱动应用于仿人机械手,研制了可以作为假肢的灵巧手。液压驱动的优点在于驱动力矩大、传动效率高、反应灵敏,可实现过载保护,稳定性好,但它体积大、管线复杂、密封性要求高、制造维护成本高且易对环境造成污染。
功能材料驱动是指采用形状记忆合金、电活性聚合物等新型材料来驱动手指关节,目前已采用形状记忆合金驱动的有Hitachi手[5]以及ENGEBERG等[6]设计的仿人手指。形状记忆合金通过温度改变尺寸长度,变形量难以精确控制,运动精度较差,其可靠性、通用性与性价比还有待提高。
电机驱动因其具有整体尺寸小、噪声低、运动稳定、易于控制、价格适中等优点而广受欢迎。根据电机的安装位置,电机驱动可以分为内置电机驱动与外置电机驱动。
DLR-HIT手[7]是内置电机驱动的代表,每根手指具有3个自由度,共有15个自由度。电机与谐波减速器等部件集成于手指内部,其集成度较高,具有较强的操作性和鲁棒性,但结构复杂,后期维护成本较高。类似的灵巧手有美国的Barrett手[8]和日本的Gifu手[9]。外置电机驱动多采用连杆传动或柔索传动进行间接驱动。
RIC手[10]为外置电机经连杆驱动的代表,所有手指均采用四连杆结构设计,连杆中嵌入有弹性元件来增加机械顺应性,使其运动更加柔顺。它具有4根手指,共有8个关节,只使用一个无刷电机驱动,优点是结构尺寸紧凑以及设计轻量化,但外转子电机与非反向驱动离合器的采用导致其成本较高。
Robonaut手[11-12]为外置电机经柔索驱动的代表,整手共有5根手指,共14个自由度。其中拇指、食指、中指为灵巧指,每根手指具有4个自由度,剩余二指为抓取指,每根手指具有1个自由度。它被应用于国际空间站,旨在代替人们进行外空间操作,其抓取能力可与穿戴航天服手套的人手运动能力相当。其他采用柔索传动的灵巧手包括意大利UBH3手[13]和法国LMS手[14]等。柔索传动[15-16]具有布局灵活、高精度、轻量化等特点,在灵巧性精密机电装置和伺服机构中应用广泛。但当传动距离较远时,现有的柔索传动机构主要通过传动轮的形式来实现,其布局异常复杂,致使系统的制造和维护成本较高。
套索传动[17-19]利用空心套管引导柔索的运动路径,可以克服已有柔索传动机构的缺点,可实现远距离运动与经过运动关节的传递,具有空间适应性强、设计成本低等优点,已被运用于仿生灵巧手[20-21]等领域。已有文献多以灵巧手为背景集中研究套索的传动机理与位置补偿,本文主要从结构设计与主从控制方面对套索驱动灵巧手进行相关研究。
1 五指灵巧手
1.1 灵巧手构型设计
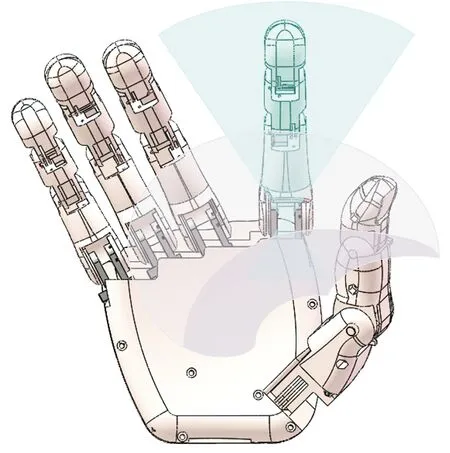
系统的整体方案如图1所示,机械系统由灵巧手和驱动集成组成,系统采用仿生设计,关节布置参照了人手的构型。灵巧手由手掌与五根手指组成,其中食指、中指、无名指与小拇指分别具有4个自由度,大拇指具有3个自由度,灵巧手共有19个自由度。

图1 灵巧手整体方案Fig.1 The overall scheme of the dexterous hand
手指安装于手掌上,手掌底部与驱动集成相连。关节采用套索传动的方式实现了驱动与关节的分离,套索两端分别与关节和驱动模块连接,驱动模块集中安装于驱动集成箱中,套索在手掌与手指内走线并留有长度余量以适应运动。
1.2 关节机构设计
手指关节的运动类型可以分为侧摆和屈曲[22],人手的掌指关节为球关节,可以等效为屈曲与侧摆两个关节。根据两个关节的排布可以分为两种方案,手指关节布局如图2所示。图2a所示为Gifu手[9]所采用的手指关节布局,其关节1与关节2的轴线互相垂直,模拟掌指关节,关节3和关节4的轴线与关节2平行,分别实现中指关节和远指关节的屈曲。图2b所示为DLR手[7]所采用的手指关节布局,与前者不同之处是最底部关节为屈曲关节,关节2为侧摆关节。考虑到套索的传动特点与灵巧手的外观,本灵巧手采用了先侧摆方案的设计。

(a) 先侧摆方案

(b) 先屈曲方案
以中指为例,其结构如图3所示,近指关节、中指关节与远指关节均由单套索驱动,每个关节上均安装有扭簧与电位器。关节处的扭簧一方面为复位运动提供动力,另一方面保持手指关节的初始伸展状态。扭簧的扭矩值主要与扭簧的中径、材料的弹性模量、圈数、受力转角等有关。扭簧的扭矩:
(1)
式中,Mts为扭簧的扭矩值,N·mm;E为材料的弹性模量,MPa;d为扭簧的线径,mm;φ为受力转角,(°);D为扭簧的中径,mm;n为扭簧有效圈数。

(a) 结构示意图

(b) 结构剖面图
扭簧的最大扭矩出现在手指近指关节处,为保证关节能够有效复位,经计算初步选用碳素钢扭簧,有效圈数为3,线径0.5 mm。灵巧手在抓取运动过程中,需要位置传感器的反馈信号进行精确操控。设计的灵巧手需要高度的拟人性,故关节空间较小,因此本文采用了体积小、质量轻、抗干扰能力强的电位式传感器。
灵巧手关节设计如图4所示,食指、中指、无名指与小拇指均包含4个关节,分别为基关节、近指关节、中指关节与远指关节。大拇指包含3个关节,分别为基关节、近指关节与远指关节。其中基关节为侧摆关节,其余关节均为屈曲关节。5个基关节由双套索机构实现传动,为了简化结构、减少套索数量,其余关节均由单套索机构实现传动。

图4 机械臂关节设计Fig.4 Joint design of the manipulator
1.3 套索传动设计
双套索传动机构主要由套管、柔索与预紧装置等组成,如图5a所示,驱动轮安装在舵机输出轴上,从动轮置于关节中。驱动轮上按顺时针与逆时针方向分别缠绕柔索,两根柔索经过挡板b后再分别经过套管a与套管b,然后经挡板a后固定在从动轮上,这种传动方式被应用于驱动5根手指的5个侧摆关节。双套索的传动过程如下:当驱动轮顺时针转动时,套管a中的柔索会跟随向右运动,套管b中的柔索会跟随向左运动,从而带动从动轮顺时针转动;当驱动轮逆时针转动时,套管a中的柔索会跟随向左运动,套管b中的柔索会跟随向右运动,从而带动从动轮逆时针转动。当系统处于静止时,套管a中柔索上的拉力能够抵消从动轮受到的顺时针方向扭矩,套管b中柔索上的拉力能够抵消从动轮受到的逆时针方向扭矩。
单套索传动机构主要由套管、柔索与扭簧等组成,如图5b所示,驱动轮安装在舵机输出轴上,从动轮置于关节中。柔索一端固定在驱动轮上,绕驱动轮缠绕后经挡板进入套管,经过另一挡板后缠绕并固定在从动轮上,从动轮上安装有扭簧,这种传动方式被应用于灵巧手除5个侧摆关节外的其他关节。单套索的传动过程如下:当驱动轮逆时针转动时,套管中的柔索跟随向右运动,从而带动从动轮逆时针转动,同时扭簧被压缩储能;当驱动轮顺时针转动时,套管中的柔索会跟随向左运动,从动轮在扭簧作用下顺时针转动。当系统处于静止时,柔索上的拉力能够抵消从动轮受到的顺时针方向扭矩,扭簧能够抵消从动轮受到的逆时针方向扭矩。

(a) 双套索传动机构

(b) 单套索传动机构图5 套索传动机构Fig.5 Mechanism of tendon-sheath transmission
两种传动机构均安装有螺栓预紧装置,预紧装置可以拉紧柔索来有效减小传动空回。同时,采用编码器与电位器来反馈主动轮与从动轮的角度位置信号,可以实现运动的双闭环控制。套索传动可以实现驱动电机的后置,使多关节串联系统更加轻量化,具有结构简单、布局灵活的优点。
1.4 驱动集成设计
驱动集成箱的结构如图6所示,驱动模块由舵机与驱动轮组成,19个关节的驱动模块与预紧装置被分层安装在不同支撑板上,各支撑板通过支撑架连接。支撑板中心加工有通孔,套索通过通孔与手掌后进入手指。通过紧凑型电机的选用与电机位置的优化布局可以减小集成箱的体积。

图6 驱动集成箱结构Fig.6 Structure of the driver integration
2 运动学与工作空间分析
多指运动学分析的是灵巧手抓取物体运动与各手指运动之间的关系,根据灵巧手运动学特性建立运动学简化模型,通过工作空间仿真验证设计的合理性。
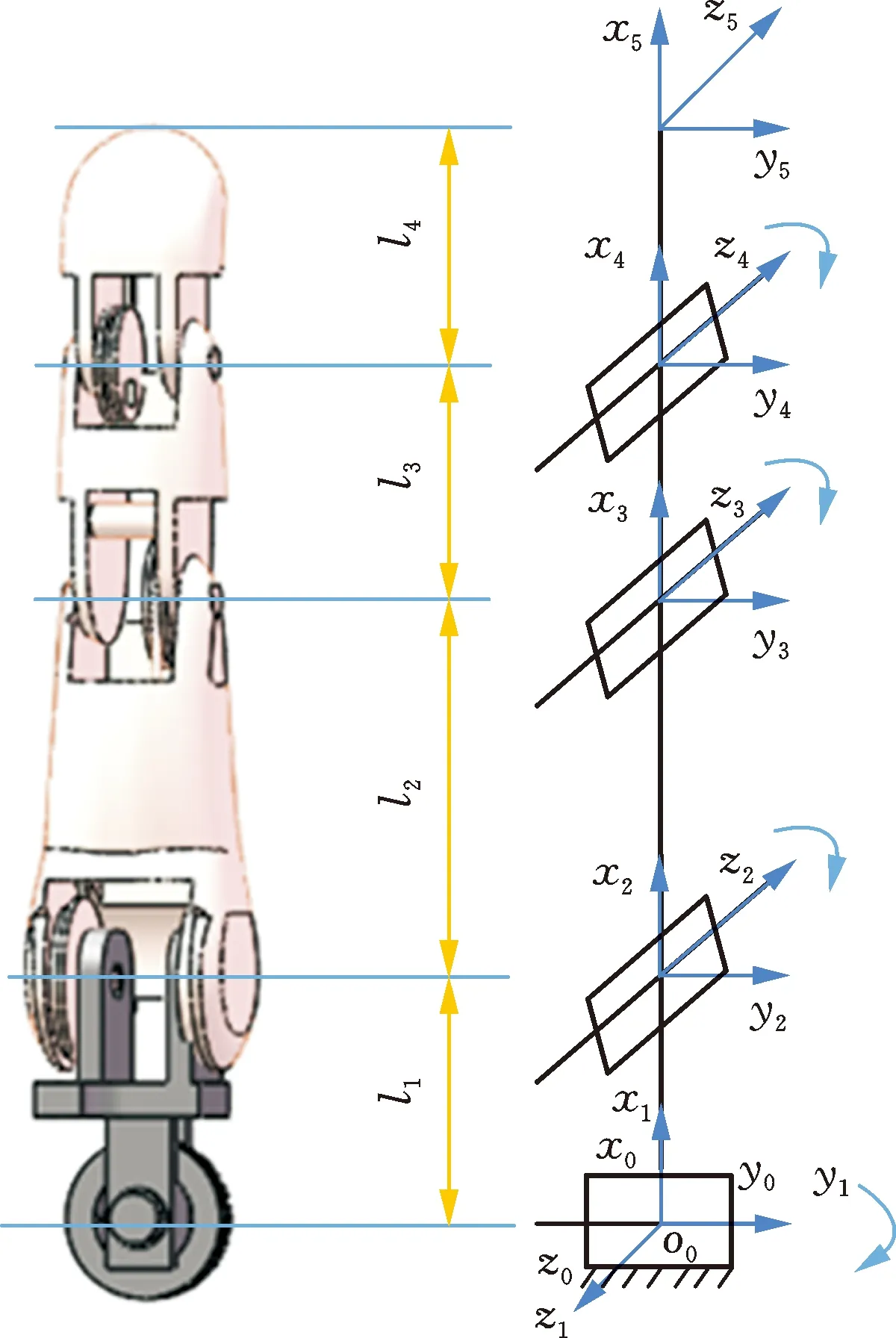
图7 食指结构简图Fig.7 Structure of the index finger
单个手指可以看作是一个多关节串联机器人,以食指为例,各指节长度分别为a1、a2、a3、a4,基于旋量理论建立手的运动学模型。如图7所示,o0x0y0z0为基坐标系,其余为动坐标系,各指节长度分别为l1、l2、l3、l4。灵巧手各关节均可视为铰接,以旋转中心为轴,定义顺时针转动时角度为正、逆时针转动时角度为负。关节处于图7所示的初始位置,其指尖坐标系与基坐标系的变换:
(2)
L=l1+l2+l3+l4
定义各个关节的运动旋量:
(3)
(4)
(5)
(6)
式中,ω1、ω2、ω3与ω4分别为各关节转动量;q1、q2、q3与q4分别为各关节转轴上任意点的坐标。
运动方程:
(7)

记cl=cosθl,sl=sinθl,clm=cos(θl+θm),slm=sin(θl+θm),clmn=cos(θl+θm+θn),sljn=sin(θl+θj+θn),其中l,m,n=1,2,3,4。计算得到正运动学方程:
(8)
式(8)中,位置变量表达式为
(9)
工作空间是评价灵巧手工作能力的重要性能指标,是对指尖工作区域的描述,可以用手指末端到达位置点的集合来描述工作空间。建立灵巧手的坐标系如图8所示,分别在基关节、近指关节、中指关节、远指关节以及指尖处建立坐标系,灵巧手的基坐标设在手掌底部中间位置。
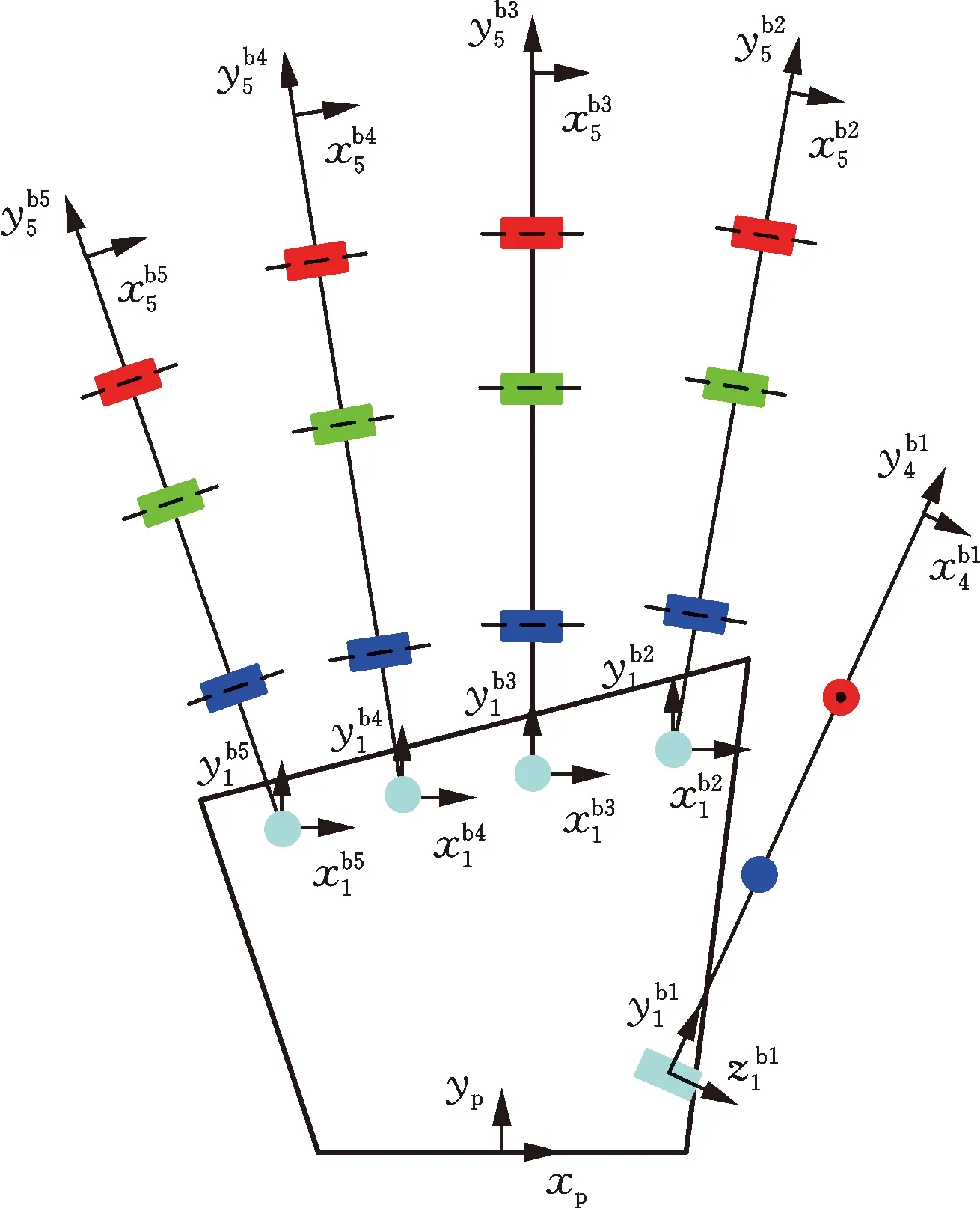
图8 灵巧手运动学模型Fig.8 Kinematic model of the dexterous hand
基于各个关节的运动范围可以得到灵巧手各指的工作空间,如图9所示。由图9可知,食指、中指、无名指与小拇指的工作空间与大拇指工作空间均有交集,验证了抓取物体的有效性。其中食指与大拇指工作空间交集最大,中指和无名指与大拇指工作空间交集次之,小拇指与大拇指工作空间交集最小,说明抓取物体时大拇指与食指配合发挥主要作用。由结果可知,灵巧手与人手具有相似的工作空间,末端可以到达设计工作空间的所有点,故构型与尺寸设计合理。

(a) 小拇指

(b) 无名指

(c) 中指
(d) 食指
3 主从控制研究
本文采用主从控制方法来对五指灵巧手进行控制,在人手上安装弯曲传感器来反馈手指弯曲角度,建立弯曲角度和灵巧手之间的映射关系,并根据此映射关系实现主手对从手的完全控制。
采用弯曲传感器[23-24]来反馈手指弯曲度,传感器串联固定电阻,传感器两端电压作为输入信号接入控制器。如图10所示,传感器的两端分别固定在指尖和指根上,手指完全展开时传感器电阻最小,手指最大弯曲时传感器电阻值随着手指的弯曲而增大。为了方便比较不同手指弯曲特征的变化规律,采用线性函数对原始输入进行归一化处理至[0°, 90°]范围。具体转换式为
(10)
式中,xi为弯曲传感器两端的测量电压;yi为线性函数转换后的值;xi,max、xi,min分别为测量电压采集数据的最大值和最小值;i=1,2,…,5,分别对应大拇指、食指、中指、无名指与小拇指。

图10 手势捕捉系统Fig.10 Gesture capture system
为了更精确地得到每个弯曲传感器的输出值,考虑到传感器的响应时间特性及实验误差,采用多组实验对式(10)进行标定,标定实验组序号为j,n次实验后取平均值作为实验的有效数据。数据的最小及最大值分别如下:
(11)
定义人手弯曲传感器输出值归一化矩阵为Y,可得人手姿态信息:
Y=(y1,y2,y3,y4,y5)T
(12)
单根手指只能反馈一个信号,但手指实际控制需要3个关节角度信号。引入主从映射[25-26]来求解关节角度,这里通过比例系数来得到手指i的r关节弯曲角度:
(13)


(14)
人手与机器人灵巧手在尺寸上的不一致,会使灵巧手产生运动误差。为了更好地实现对灵巧手的控制,针对主从手尺寸不一致的问题,引入主从手指长度比例关系:
(15)

4 样机实验
4.1 样机平台
灵巧手样机实验平台如图11所示,灵巧手结构采用尼龙材料3D打印制作。驱动电机采用LX-16A串行总线自带减速器的舵机(最大输出扭矩19.5 kg·cm),舵机带有温度监测功能,底部可安装散热装置。柔索采用直径为0.5 mm的钢丝绳,套管采用圆形弹簧丝绕成的外径1.2 mm、内径0.8 mm的螺旋套管。

图11 灵巧手实验样机Fig.11 Experimental prototype of the dexterous hand
灵巧手的控制系统采用NI-cRIO-9067作为下位机,系统的硬件结构如图12所示。首先在上位机用LabVIEW软件编写控制程序,然后通过CAN接口下载到运行实时系统的下位机执行。手指弯曲信号由Flex 4.5弯曲传感器测量后输入NI-9205模块,关节角度反馈信号由电位器测量后输入NI-9205模块,运动控制信号由NI-9264模块输出到电机驱动器。弯曲传感器电阻在60~110 kΩ间变化,实时反馈与数据监测的频率设置为1 kHz。

图12 样机控制系统Fig.12 Control system of the experimental prototype
4.2 灵巧手运动实验
为了测试套索驱动灵巧手的性能,通过直接控制舵机对灵巧手的侧摆关节、近指关节、中指关节和远指关节进行运动实验,如图13所示。由实验可知,所设计的灵巧手具有较好的运动灵活性,套索的应用能够有效避免干涉,实现各关节的解耦独立控制。

(a) 初始姿态

(b) 两侧张开

(c) 单侧摆动

(d) 近指转动90°

(e) 中指转动90°

(f) 远指转动90°
4.3 抓取控制实验
通过实际测量人手与所控制灵巧手的尺寸,对尺寸比例系数mi进行标定,结果如表1所示。通过人手五指上安装的弯曲传感器作为输入信号,每根手指均进行了100次伸展弯曲实验,记录传感器反馈电压信号的最大值与最小值,由式(11)求得各手指反馈电压标定的最大值与最小值,结果见表1。

表1 手势识别相关参数Tab.1 Parameters of gesture recognition

(a)抓取水瓶动作1

(b)抓取水瓶动作2

(c)抓取水瓶动作3

(d)抓取苹果动作1

(e)抓取苹果动作2

(f)抓取苹果动作3
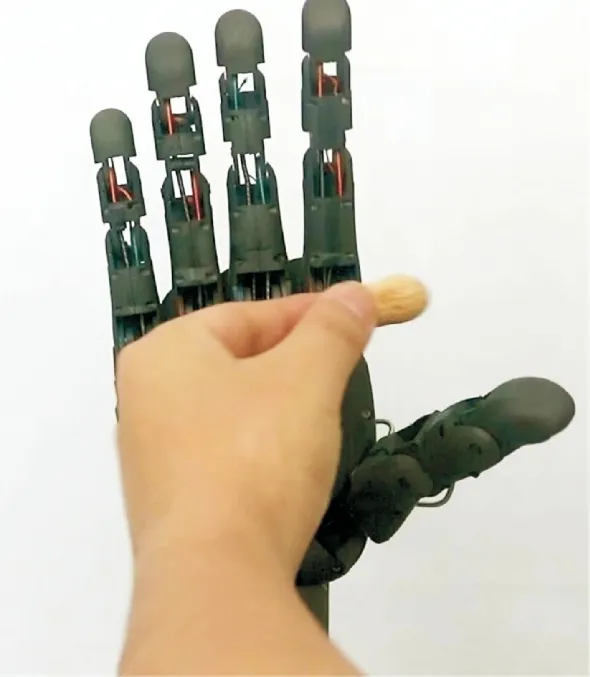
(g)抓取花生动作1

(h)抓取花生动作2

(i)抓取花生动作3

表2 主从映射相关参数
如图15所示,其中0~10 s为抓取水瓶曲线,10~20 s为抓取苹果曲线,20~32 s为抓取花生曲线。由曲线可知,抓取水瓶时,各指关节均有明显运动,其中大拇指与食指各关节弯曲均较小,

(a) 弯曲传感器信号

(b) 大拇指关节运动

(c) 食指关节运动

(d) 中指关节运动

(e) 无名指关节运动

(f) 小拇指关节运动
中指关节弯曲角度较大,各指均发挥抓取作用;抓取苹果时,各指关节也均有明显运动,其中大拇指与食指各关节弯曲均较小,中指与小拇指关节弯曲角度较大,各指均发挥抓取作用;抓取花生时,大拇指与食指各关节弯曲较大,中指、无名指与小拇指关节弯曲角度较小,抓取主要由大拇指与食指配合完成。特别地,在20~32 s时,yi值小于式(14)定义的临界值y′i,与其他图相比,图15b中的绿色曲线与红色曲线更加接近,图15c中绿色与红色曲线也更加接近且数值明显大于蓝色曲线数值,说明在抓取花生时,大拇指与食指的远指与近指关节相较于其他手指的关节运动更加明显,通过抓取过程的变比例系数控制实现了对体积较小物体的有效抓取。由实验可知,所设计的灵巧手能有效抓取圆柱与圆球等各类物品,通过基于弯曲传感器的主从控制可以实现对五指灵巧手的控制。
5 结论
本文将套索传动应用于灵巧手,提出了一种电机后置的19-DOF拟人轻型灵巧手。参照人手的构型确定了灵巧手的构型,对驱动模块与手指关节进行了设计。建立了灵巧手的多指运动学模型,并对末端运动空间进行了仿真。基于弯曲传感器对主从映射算法进行了研究,实现了抓取的主从跟踪控制。搭建灵巧手样机并进行关节运动实验,验证了所设计灵巧手的运动灵活性。通过抓取实验验证了主从映射控制算法的有效性。
实验结果表明,基于套索传动的灵巧手具有可行性,未来可应用于人形机器人以及对灵巧手的灵活性有较高要求的场景,鉴于其成本低的优点,还可以作为科普或者教学工具。
齿轮与套索传动的应用使关节控制具有空回迟滞与非线性的特点,主从控制要达到较高的精度也需要非线性补偿,下一步工作将重点对控制算法进行研究。
