平衡重式叉车防侧翻模型预测控制研究
2021-05-06李嘉诚唐希雯陈无畏
夏 光 李嘉诚 唐希雯 张 洋 陈无畏
1. 合肥工业大学汽车工程技术研究院,合肥,230009 2. 国防科技大学电子对抗学院,合肥,230037 3. 合肥工业大学汽车与交通工程学院,合肥,230009
0 引言
近年来叉车在港口、建筑、工程建设等领域起到了不可替代的作用,我国叉车销量逐年递增,近十年我国叉车销量均超过全球销量的30%[1-2]。
叉车作为搬运机械,其作业环境相对复杂,经常需要在狭小空间内实现转向,容易发生侧翻事故。叉车发生侧翻将直接危及驾驶人员的生命安全并造成经济损失。据统计,叉车发生事故的原因主要有侧翻、剐蹭以及碰撞,而由于侧翻导致的事故占比最高,达到42%[3-5]。关于防止叉车侧翻的研究是具有现实意义的。
RINCHI等[6]基于MATLAB/Simulink建立了电动叉车模型并提出了一种车辆主动安全控制系统,该系统通过载荷传感器以及坡道识别传感器对叉车装载货物的重心进行估计,判断重心在行驶平面的投影是否处于安全区域内,通过限制电动轮的最大速度和加速度确保叉车的稳定性,当不能保证车辆稳定性时则停止运行并发出警报,该系统能够有效防止叉车由于货物较重或质心偏移导致的翻车。SPOONER等[7]发明了一种用于平衡重式叉车载重预警系统,当叉车装载货物超出预定值时,系统通过电磁阀控制门架前倾角度以及货叉上升的高度。LEMERLE等[8-9]考虑叉车轮胎刚度和阻尼特性对叉车在不平路面行驶稳定性的影响并进行了参数优化和仿真,研究了高速转弯工况下四轮叉车的稳定性。国内学者对叉车防侧翻的研究处于起步阶段,夏光等[10]通过叉车主动后轮转向(ARS)与直接横摆力矩控制(DYC)的解耦控制消除ARS与DYC之间的干涉耦合,提升了叉车的状态跟踪和操纵稳定性。刘显贵等[11]提出基于横摆角速度和质心侧偏角的叉车主动后轮转向系统自适应线性二次高斯(LQG)控制策略进行叉车动态安全稳定性仿真计算,提高叉车的稳定性。
由于叉车属于低速非道路车辆,前后轴距较小,装载货物时速度的骤变易引起纵向的俯仰倾翻,因此很难直接应用其他车辆的基于ABS的防侧翻控制策略。本文根据叉车特殊的底盘结构设计了一种液压支撑油缸,为车身提供侧向支撑力;提出基于零力矩点的叉车行驶状态划分策略和支撑方式,并进行了仿真和实车试验。
1 平衡重式叉车转向侧翻机理
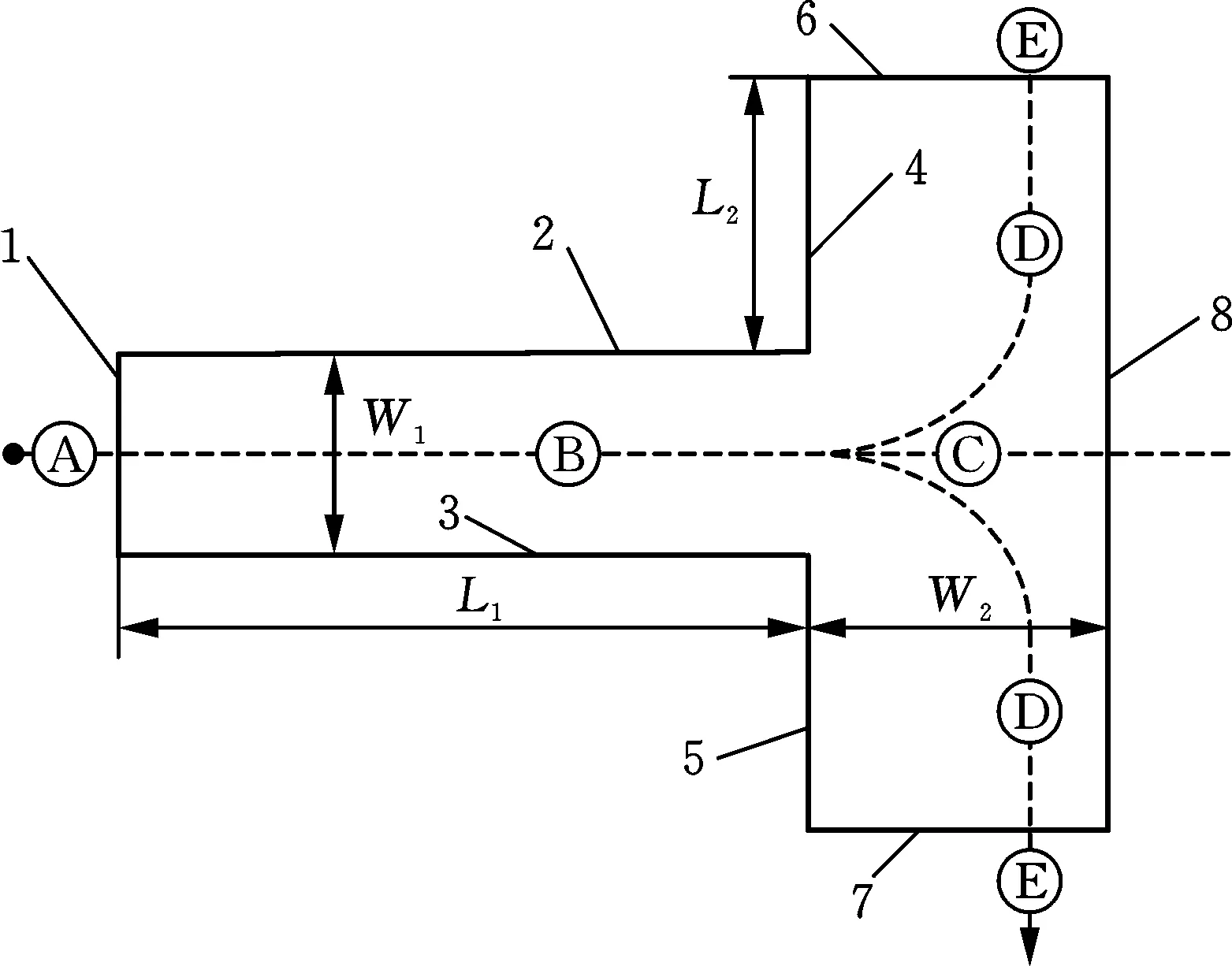
平衡重式叉车具有前驱后转向的底盘结构,车身与前驱动桥固连,与后转向桥之间通过铰接的方式连接[4-5,12-13],如图1所示。

图1 车身与后桥结构示意图Fig.1 Structure of the body and rear axle
平衡重式叉车正常行驶时其三点支撑平面为ABE,车身可沿前桥中心与后铰接点的连线EF进行左右摆动。这种摆动保证了叉车在凹凸不平路面的通过性,在车轮发生离地侧倾时,车身不会随之发生严重侧翻,但当叉车高速转向或驾驶员误操作时,由于车身快速侧倾,载荷急剧向外侧转移,导致内侧车轮离地,最终造成严重的侧翻事故。
2 平衡重式叉车防侧翻执行机构
通过对叉车结构的分析可知,在侧倾过程中,当侧倾轴线为EF时,叉车依旧处于稳定状态;当叉车继续侧倾,导致侧倾轴线E端点向外偏移,载荷向外侧转移,此时叉车侧翻可能性逐渐增大,因此考虑在叉车侧倾导致载荷向外侧转移时,额外对车身添加防侧倾力矩。本文设计了一种液压支撑油缸,当叉车有侧翻可能性时,液压支撑油缸为车身提供侧向支撑力以减小叉车侧倾,防止叉车侧翻。液压支撑油缸的安装方式如图2所示。

图2 液压支撑油缸安装示意图Fig.2 Installation diagram of the hydraulic support cylinder
在叉车正常行驶时,控制电磁阀开度全开,此时液压支撑油缸上下两腔连通。当叉车通过凹凸不平路面时,由于电磁阀节流孔作用,液压缸的活塞运动速度变缓慢,通过缓冲阀吸收压力,可以起到一定的柔性支撑作用,增加了叉车行驶中的平顺性。在叉车进行高速紧急转向或驾驶员误操作时,根据叉车不同的行驶状态控制输出不同占空比的PWM信号控制电磁阀开度大小,改变油缸的阻尼力,为车身提供液压支撑力。液压支撑油缸实车安装如图3所示。

图3 液压支撑油缸实车安装图Fig.3 Actual installation diagram of hydraulic support cylinder
3 叉车动力学模型及侧翻评价标准
3.1 车辆二自由度模型
车辆二自由度线性模型能够反映车辆的侧向和横摆运动,如图4所示。
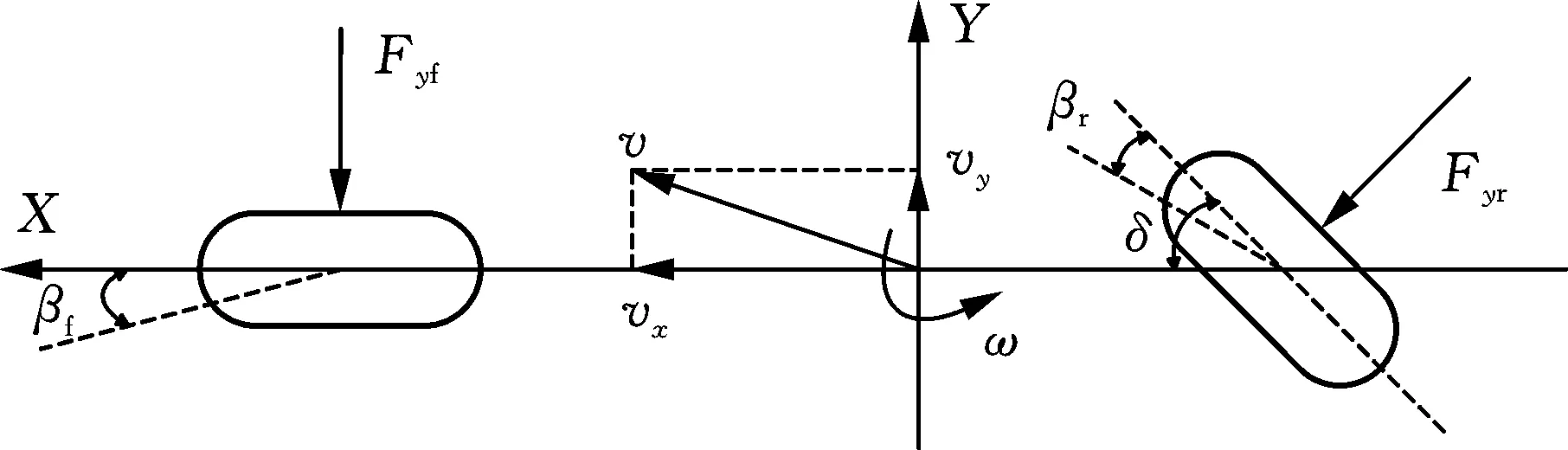
图4 后轮转向叉车二自由度模型Fig.4 2-DOF model of the rear-wheel steering forklift truck
沿Y轴的侧向力平衡方程为
m(ay+vxω)=Fyrcosδ+Fyf
(1)
式中,m为叉车整车质量;δ为后轮转角;vx为叉车沿X轴方向的速度;ω为叉车横摆角速度。
沿Z轴的侧向力平衡方程为
(2)
式中,Iz为整车绕Z轴的转动惯量;a、b分别为前后轮到质心距离。
前后轮侧向力
(3)
式中,kyf、kyr分别为前后轮的侧偏刚度。
侧向加速度
(4)
前后轮侧偏角
(5)
3.2 车辆侧倾三自由度模型
车辆二自由度模型并不能反映叉车车身的侧倾情况,根据国内某叉车厂自主研发的3 t系列平衡重式叉车的实际参数,经适当简化得叉车侧倾三自由度模型,如图5所示。
沿Y轴的侧向力平衡方程为
(6)
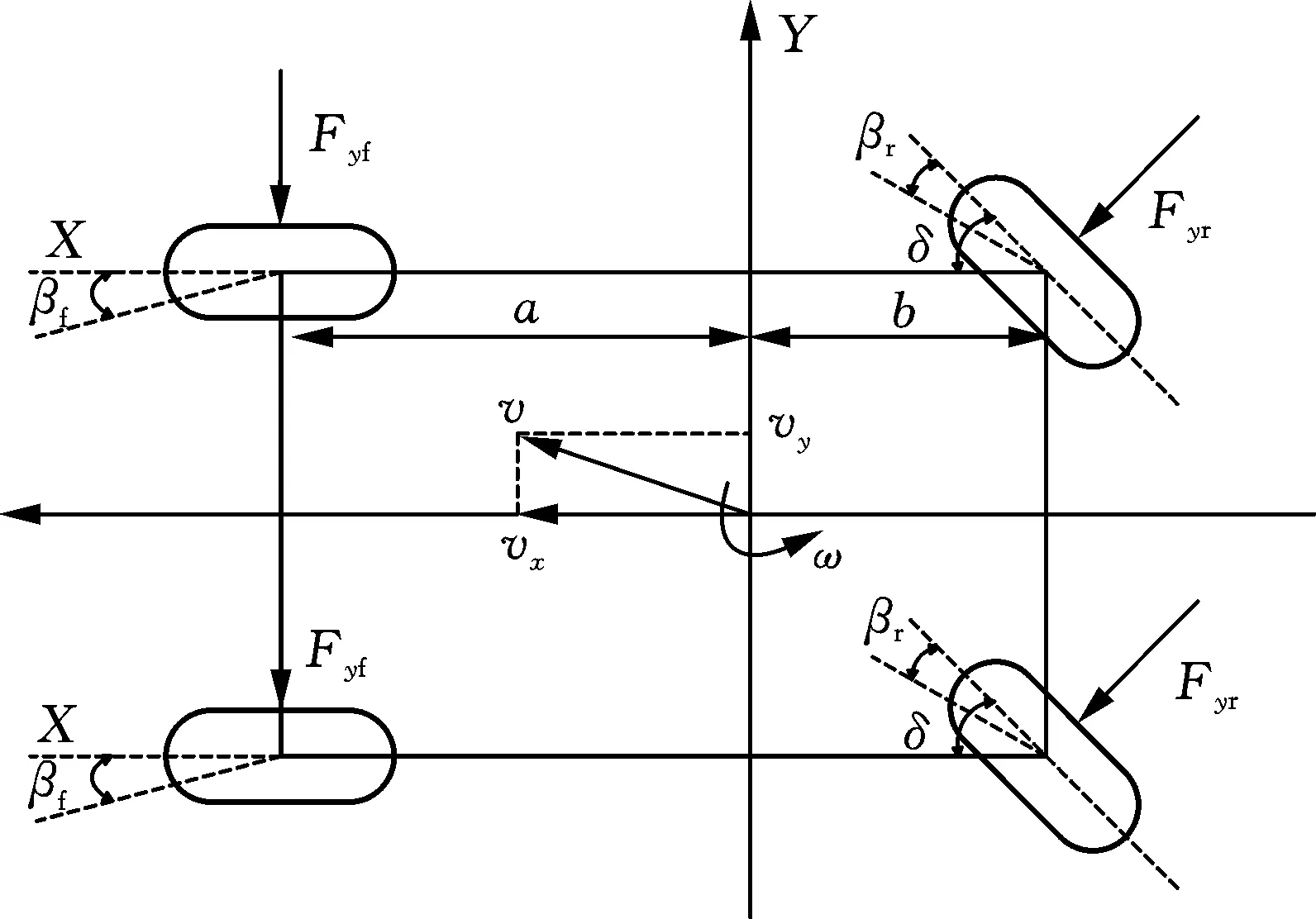
(a) 横向动力学模型

(b) 侧倾动力学模型图5 平衡重式叉车侧倾三自由度模型Fig.5 3-DOF model for counter balanced forklift truck
式中,ms为车身质量;φ为车身绕铰接点的侧倾角度;hs为车身质心到铰接点距离。
沿Z轴的侧向力平衡方程为
(7)
沿X轴的侧向力平衡方程为
(8)
(9)
(10)
式中,Ixeq为整车绕X轴的转动惯量;F为油缸支撑力;c为油缸到铰接点的距离;Ix为车身绕X轴的转动惯量;i为通过支撑油缸的常闭电磁阀电流;f(i)为在电流i下支撑油缸的支撑力;imax为允许通过油缸电磁阀的最大电流。
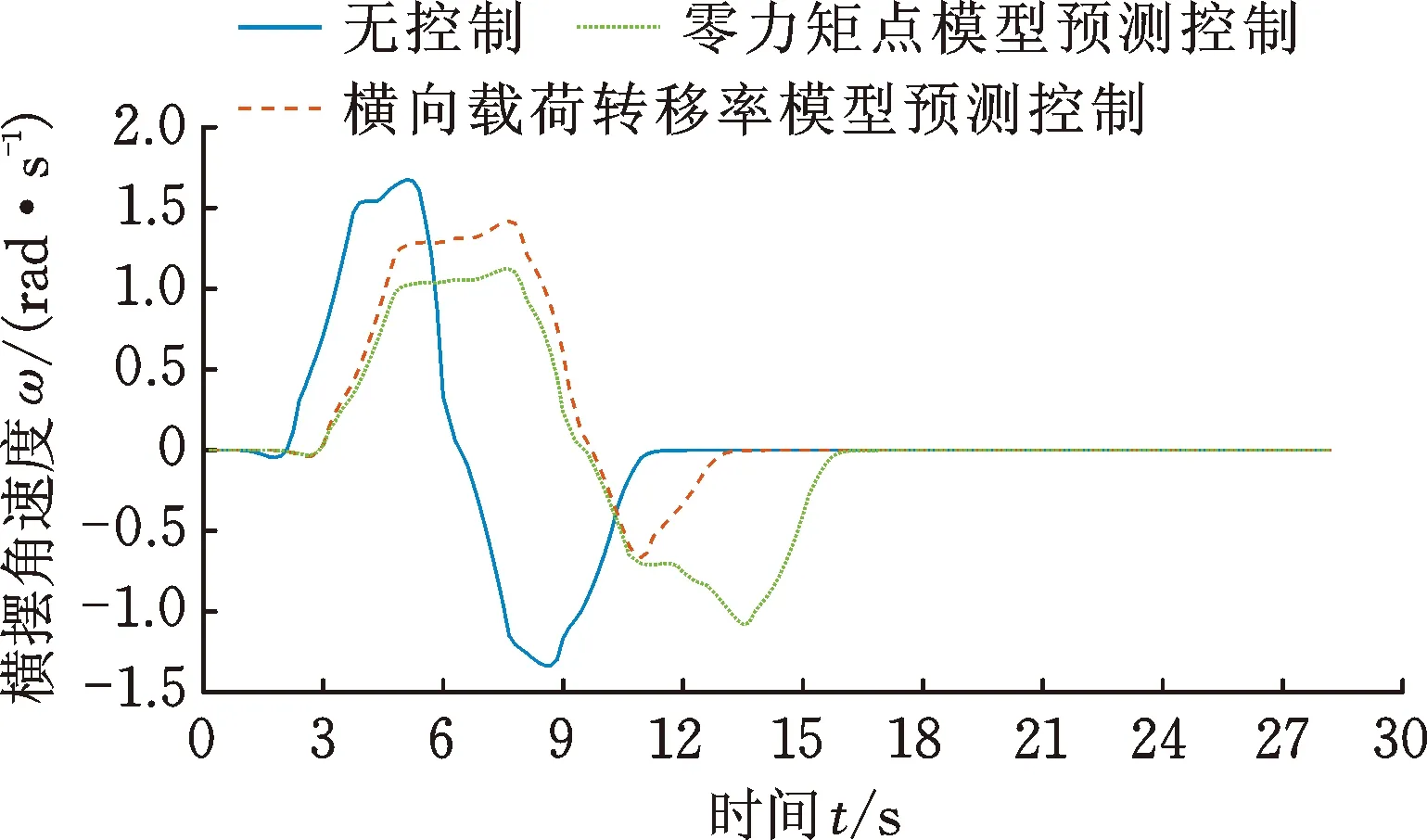
当0 (11) (12) (13) 叉车在侧倾过程的车身侧倾角和横向载荷转移率能够反映车身的侧倾程度[14-15],但当叉车经过凹凸不平路面时,会导致以上两种评价指标出现误差,影响叉车仿形功能,因此采用零力矩点作为评价指标。 4.1.1评价指标计算 零力矩点(ZMP)是指在地面上的某一可变点,使得车辆系统各部分对该点重力矩和惯性力矩的合力矩为零[16-18]。零力矩点能够时刻反映车辆在运行过程中的侧倾情况,并对整个侧倾以及侧翻过程中车辆的行驶状态给予准确评价。定义车辆零力矩点的公式为 (14) 式中,mi、ri和Mi分别为系统中各部分的质量、在对应坐标系中的矢量位置以及惯性力矩,i=1代表车身,i=2代表底盘;Mz为零力矩点位置处的净力矩;g为重力加速度。 针对平衡重式叉车零力矩点的计算,可将叉车车身替代为在车身联合质心位置的质点,如图6所示。 图6 叉车零力矩点示意图Fig.6 Schematic diagram of forklift zero moment point 图6中P1、P2点分别为车身和底盘质心位置,综合图6和式(13)并将车身与底盘对P点的合力矩分别投影到X、Y、Z坐标轴中可得 (15) 在研究叉车横向失稳时,只需要考虑零力矩点的侧向分量Y坐标与车辆支撑平面的关系,因此将叉车底盘和车身参数代入式(14)可得 (16) 令τx=0,得 (17) 式中,τx为合力矩投影到X坐标轴的分量;yzmp为零力矩点在Y坐标轴的分量;h为车辆质心到地面高度。 4.1.2评价指标阈值确定 本文将液压支撑油缸作为叉车防侧翻执行机构,能够在一定程度上扩大其支撑平面,而零力矩点作为侧倾程度的评价指标与叉车侧倾过程的车身支撑平面进行比较。结合图7分析可得,在叉车安全行驶时,其支撑平面为ABE,当车身继续侧倾时,液压油缸锁止为车身提供支撑力,支撑平面扩大为ABGF。据此设定零力矩点的阈值,将叉车侧倾分为安全行驶、危险可控和临界侧翻3个阶段。 图7 叉车支撑平面Fig.7 Forklift support plane 当零力矩点沿Y轴分量|yzmp| (18) 当|yzmp|>l2时,叉车即将发生侧翻,因此得到叉车临界侧翻阈值如下: (19) 式中,a、b、d分别为叉车前后轴距和轮距。 图8 防侧翻控制系统结构Fig.8 Anti-rollover control system structure 控制策略如图8所示。①安全行驶阶段。当yzmp小于安全阈值时,液压油缸处于自由状态,不提供支撑力。②危险可控阶段。当yzmp处于安全阈值和侧翻阈值之间时,通过模型预测控制对油缸支撑力进行调节,防止叉车进一步侧倾。③临界侧翻阶段。当yzmp大于侧翻阈值时则控制油缸为车身提供最大支撑力。 模型预测控制是通过被控对象的线性离散模型对系统控制量进行优化求解,使得系统趋近于目标函数[19]。 4.2.1预测模型 (20) 对于施加控制的叉车,其运动特性如下所示: (21) 其中控制量u=FT。当叉车处于危险工况时,油缸支撑力F能够改善叉车车身姿态,因此对支撑力F的确定尤为重要,利用式(20)与式(21)作差得线性时变系统模型: (22) 由式(19)和式(21)得到基于液压支撑力控制的叉车状态方程: (23) 为得到模型预测算法所适用的离散模型,对式(23)进行欧拉一阶差商法离散化处理,得到离散方程[20]: (24) Ad=I+TsABd=TsBCd=C 式中,I为单位矩阵;Ts为采样时间。 利用模型预测算法在控制时需要对控制量进行约束,因此需要引入增量模型并将状态变量x,写为ξ(k)=[x(k)u(k-1)]T,可得状态空间方程: (25) 由式(24)可知k时刻系统的输出,因此通过迭代计算在预测时域Hp内的j时刻系统的输出: (26) 将所有时刻系统输出用矩阵表达: Y(k)=μξ(k)+τΔU(k) (27) 4.2.2滚动优化 在yzmp介于安全阈值和侧翻阈值之间时,此时叉车侧倾处于危险可控阶段,为了防止叉车侧翻,系统需要时刻对油缸支撑力F进行调节。控制过程中因此设定目标函数为 J=(R(k)-Y(k))TQ(R(k)-Y(k))+ΔUT(k)PΔU(k) (28) 式中,R(k)中的元素为期望横摆角速度、侧倾加速度以及侧倾角;Q、P分别为输出误差和控制增量误差权重系数。 4.2.3约束条件 在模型预测控制中,控制量以及系统状态变量需要满足叉车的实际物理限制,对于控制系统,若输出的控制量超出实际执行机构的执行能力,则直接导致系统失稳。控制系统约束的一般形式如下: (29) 4.2.4反馈矫正 系统在运行过程中累计的误差会对系统控制效果产生影响,模型预测算法能够对系统进行反馈调节,根据状态量的实际测量值进行矫正。由前文分析可知,系统状态变量和控制变量均能够根据公式计算,估算状态变量能使系统误差进一步减小。 设系统工作时实时的状态估算方程为 (30) 结合式(19)得观测器方程: (31) 在系统状态确定时可通过对观测器反馈矩阵O的设计实现观测状态与实际状态的误差保持在一定范围内。 本文基于MATLAB/Simulink建立防侧翻控制器,将yzmp与叉车侧倾过程中支撑平面的变化作为其行驶状态划分的依据,在叉车侧倾过程中利用模型预测控制算法进行油缸支撑力的调节,提高叉车的横向稳定性。控制器如图9所示。 图9 防侧翻控制系统模型Fig.9 Anti-rollover control system model 图10 欧标工况路线Fig.10 Route of European standard working condition 传统静态稳定性试验已不能准确模拟叉车在复杂工况下的稳定性,因此根据EN 16203:2014标准(以下简称“欧标”)进行平衡重式叉车动态稳定性仿真与试验[4]。由第4节零力矩点分析可知,当叉车空载时其车身质心位置靠后,叉车行驶安全阈值最小。为了进一步验证,分别在空载、半载和满载仿真工况下仿真,欧标工况试验道路如图10所示。 叉车在L1直线段加速,以不低于90%最高车速到达L2并转向,试验过程中叉车任意部分不能与边线发生接触。叉车左转和右转工况一致,本文只对右转工况进行仿真和试验。 为了保证叉车的动力学输出满足实际工况,需要同时对系统输出和控制量进行约束,根据系统约束的一般行驶和文献[21]可得叉车侧向加速度与地面附着系数μ满足: ay≤|μg| (32) 根据文献[5]对叉车侧翻极限时的横摆角速度和侧倾角进行约束: -12°≤φ≤12°-2.1 rad/s≤ω≤2.1 rad/s 控制器采样时间T=0.01 s,预测时域Hp=25,控制时域Hc=5。 为验证零力矩点作为叉车侧倾过程的评价指标的可行性,选用横向载荷转移率作为对比,仿真过程中记录车身侧倾角和横摆角速度,如图11~图16所示。 图11 欧标工况下空载车身侧倾角(仿真)Fig.11 No-load body roll angle under European standardworking condition (simulation) 图12 欧标工况下空载车辆横摆角速度(仿真)Fig.12 No-load vehicle yaw rate under European standard working condition (simulation) 图13 欧标工况下半载车身侧倾角(仿真)Fig.13 Half-load body roll angle under European standard working condition(simulation) 图14 欧标工况下半载车辆横摆角速度(仿真)Fig.14 Half-load vehicle yaw rate under European standard working condition(simulation) 图15 欧标工况下满载车身侧倾角(仿真)Fig.15 Full-load body roll angle under European standard working condition(simulation) 图16 欧标工况下满载车辆横摆角速度(仿真)Fig.16 Full-load vehicle yaw rate under European standard working condition(simulation) 仿真数据对比如表1和表2所示。由表1和表2可知,在空载、半载以及满载工况下,与无控制相比,横向载荷转移率模型预测控制的车身侧倾角峰值最大减小28.7%,横摆角速度峰值最大减小35.1%;零力矩点模型预测控制的车身侧倾角峰值最大减小51.2%,横摆角速度峰值最大减小38.8%。仿真结果表明,零力矩点作为评价指标效果更加显著,验证了零力矩点作为叉车侧倾评价标准具有可行性。 表1 仿真车身侧倾角峰值Tab.1 Simulated peak value of body roll angle rad 表2 仿真车辆横摆角速度峰值 为进一步验证控制策略的可行性,本文设计了基于飞思卡尔MC9S12X128单片机的防侧翻控制器,主要包括陀螺仪传感器信号采集、最小系统和驱动电磁阀输出3个部分。 试验车辆为国内某叉车厂自主研发的3 t系列平衡重式叉车。防侧翻控制系统传感器以及执行机构实车安装位置如图17所示。试验工况与仿真工况保持一致,如图18所示。 图17 传感器及执行机构安装位置Fig.17 Installation location of sensors and actuators 图18 欧标工况下实车试验Fig.18 Real vehicle test under European standard working condition 由于系统处于开发试验阶段,为保证试验过程中驾驶人员安全,在叉车左右两侧均安装防护架。试验时对比叉车侧倾姿态如图19所示。 (a) 空载工况无控制 (b) 空载工况零力矩点模型预测控制图19 欧标工况下车身姿态对比Fig.19 Comparison of body postures under European standard working condition 由图19可知,系统不进行控制时,在高速转向工况下,叉车内侧前轮明显离地且外侧防护架与地面直接接触,即叉车会发生侧翻;当系统进行防侧翻控制时,叉车左前轮未明显离地且外侧防护架不与地面接触,此叉车不会发生侧翻。过程中记录车身侧倾角和横摆角速度。 (1)空载工况。由仿真结果可知,空载是叉车发生侧倾最严重的工况,此时叉车联合质心集中在车身后部,而叉车的三角形支撑平面在车身后部分布较少,因此空载工况试验对系统稳定性和可行性要求更高。实验结果如图20、图21所示。 图20 欧标工况下空载车身侧倾角(试验)Fig.20 No-load body roll angle under European standard working condition (test) 图21 欧标工况下空载车辆横摆角速度(试验)Fig.21 No-load vehicle yaw rate under European standard working condition (test) (2)半载工况。平衡重式叉车在作业过程中多数为半载工况,此时叉车联合质心位于车身中部,叉车接地载荷分布相对均匀,半载试验工况具有实际工程意义。实验结果如图22、图23所示。 图22 欧标工况下半载车身侧倾角(试验)Fig.22 Half-load body roll angle under European standard working condition (test) (3)满载工况。满载工况下,平衡重式叉车联合质心位于前轴附近,此时后轮接地载荷最小,而液压支撑油缸位于车身和后转向桥之间,因此满载工况能够验证液压支撑油缸安装位置的可行性。实验结果如图24、图25所示。 图23 欧标工况下半载车辆横摆角速度(试验)Fig.23 Half-load vehicle yaw rate under European standard working condition (test) 图24 欧标工况下满载车身侧倾角(试验)Fig.24 Full-load body roll angle under European standard working condition (test) 图25 欧标工况下满载车辆横摆角速度(试验)Fig.25 Full-load vehicle yaw rate under European standard working condition (test) 由图20~图25可知,在空载、半载和满载工况下,与无控制相比,横向载荷转移率模型预测控制与零力矩点模型预测控制均能减小叉车在高速紧急转向时的侧倾,但零力矩点模型预测控制对车身侧倾幅度和横摆幅度改善更明显。试验峰值数据如表3和表4所示。 表3 车身侧倾角试验峰值Tab.3 Test peak value of body roll angle rad 表4 车辆横摆角速度试验峰值Tab.4 Test peak value of vehicle yaw rate rad/s 由表3和表4可知,空载工况的叉车车身侧倾幅度最大,满载工况的车身侧倾幅度最小;空载工况下,与无控制相比,零力矩点模型预测控制能够将车身侧倾角峰值最大减小64.4%,横摆角速度峰值最大减小23.1%,横向载荷转移率模型预测控制能够将车身侧倾角峰值最大减小50.6%,横摆角速度峰值最大减小7.2%。试验结果表明,零力矩点作为叉车侧倾评价指标能够对不同阶段的叉车侧倾进行准确表征,叉车防侧翻模型预测控制能够减小车身侧倾幅度,与仿真结果相似,验证了基于零力矩点的叉车防侧翻模型预测控制的可行性。 (1)为避免平衡重式叉车在高速转向时发生侧翻,提出了一种基于零力矩点位置的叉车行驶状态划分方法。将零力矩点的侧向分量与叉车的支撑面进行对比,并考虑侧倾过程叉车支撑面的动态变化,将叉车状态划分为安全行驶、危险可控以及临界侧翻3个阶段。 (2)设计了以液压支撑油缸作为执行机构的控制系统,以基于零力矩点的模型预测控制进行防侧翻控制器设计。通过对油缸支撑力进行约束和调节来改善叉车行驶姿态,提高横向稳定性。 (3)进行了欧标工况仿真与实车试验,结果表明,基于零力矩点模型预测控制的平衡重式叉车防侧翻控制策略可大幅降低平衡重式叉车高速紧急转向工况下的车身侧倾概率,有效防止叉车侧翻,提高了平衡重式叉车的稳定性与主动安全。4 防侧翻控制系统设计
4.1 叉车侧翻评价指标




4.2 模型预测控制





5 仿真验证及分析

5.1 仿真工况设置
5.2 仿真参数设置
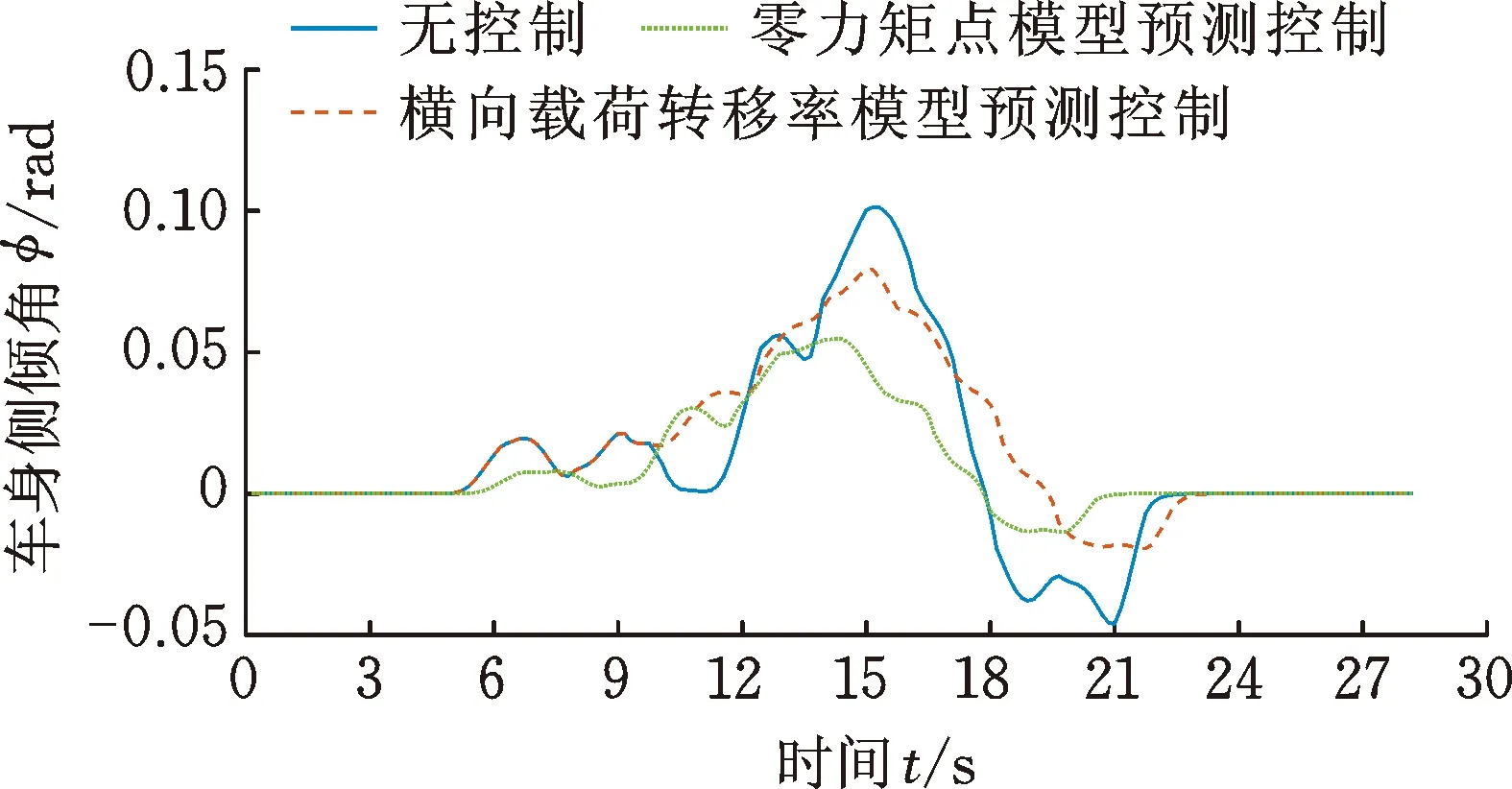
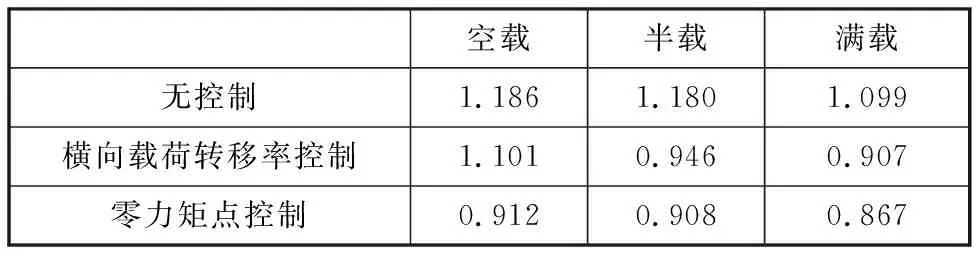
5.3 仿真结果分析






6 实车试验
6.1 控制器设计与试验条件


6.2 实车试验与结果分析









7 结论
