基于模糊积分的三自由度直升机模型的飞行姿态控制
2016-07-21李红星陈晓倩许晓晖康武彪
赵 俊,李红星,陈晓倩,许晓晖,康武彪
(北京联合大学自动化学院,北京 100101)
基于模糊积分的三自由度直升机模型的飞行姿态控制
赵 俊,李红星,陈晓倩,许晓晖,康武彪
(北京联合大学自动化学院,北京 100101)
[摘 要]针对三自由度直升机系统的不稳定性、非线性、强耦合等特点,设计了模糊积分控制算法,进行了直升机模型的飞行姿态控制研究。基于MATLAB的仿真平台,进行模糊积分控制的直升机系统仿真研究,分析了系统的鲁棒性和抗干扰性,并与传统的PID控制算法进行比较,仿真结果表明,模糊积分控制算法能够有效地控制三自由度直升机模型的飞行姿态,并且具有良好的动态品质,较好的鲁棒性和抗干扰能力。
[关键词]三自由度直升机;模糊积分控制;仿真;鲁棒性
引言
对直升机模型系统的控制方法研究是航空航天控制、机器人控制、各类伺服云台控制等的一个缩影,能起到触类旁通的作用,因其较好的物理特性,研究出来的控制算法也能移植到其他被控对象中,因此,直升机模型系统的控制算法研究具有重要的工程意义。目前对直升机模型的多数研究只局限于仿真平台,仍未摆脱实验对象的理想化模式。多数都是针对单轴的控制,线性化后的模型较少考虑到系统内部之间的耦合问题。针对三自由度直升机模型具有多变量、非线性的特点,以及俯仰轴与横侧轴、旋转轴与横侧轴之间具有强耦合的特点,本文设计了模糊积分控制算法,使三自由度直升机在同一位置做起飞和停止的动作,能平稳精确地控制飞行姿态[1-5]。
1 三自由度直升机系统模型的建立
1.1三自由度实验室直升机模型结构
三自由度直升机系统(简称直升机)由基座、平衡杆、平衡块和螺旋桨等部分组成。其实际结构如图1所示。平衡杆以基座为支点,进行俯仰和转动的飞行动作。螺旋桨和平衡块分别安装在平衡杆的两端。螺旋桨旋转产生的升力可以使平衡杆以基座为支点做俯仰运动,利用两个螺旋桨的速度差可以使平衡杆以基座为轴做偏航运动。平衡杆的俯仰、滚动、偏航方向分别安装了3个光电码盘传感器,用以测量平衡杆俯仰、滚动、偏航角度数据,其中光电码盘传感器的数据转换关系如表1所示。两个螺旋桨分别由两个直流无刷电机驱动,为直升机提供动力。通过调节安装在平衡杆另一测的平衡块可以改变螺旋桨电机的出力大小。安装在基座的集电环保证了系统本体和电控箱之间的信号传送,不受直升机转动的影响[6-8]。

表1 光电码盘数据转换关系Table 1 The data conversion relationship of Photoelectrical Encoder
三自由度直升飞机是二输入三输出系统,二输入为两个螺旋桨电机的电压,三输出为俯仰角、横侧角和旋转角。
1.2三自由度直升机系统建模
三自由度直升机模型简化结构图如图2所示。假设直升机悬在空中,并且俯仰角为零。俯仰轴的转矩是由两个螺旋桨电机产生的升力F1和F2;若直升机在转动过程中俯仰角不为零,则转矩是由两个电机升力在竖直方向的分力,当直升机本体重力小于升力大小时,直升机开始做上升运动;反之直升机做下降的运动。横侧轴由两个螺旋桨产生的升力控制,若F1>F2,则螺旋桨将产生倾斜,实现直升机旋转[2]。
建立三轴动力学方程如下:
俯仰轴模型:
横侧轴模型:
旋转轴模型:
其中:Vs和Vd为控制量,Vs=V1+V2,Vd=V1-V2,V1和V2是两个电机的电压,由它们产生升力F1和F2;Kc代表螺旋桨的电机升力常数;L1是支点到电机的距离;L2是支点到平衡块的距离;Tg是由俯仰轴的重力G产生的有效重力矩,Tg=mhgL1-mbgL2,mh和mb分别是直升机螺旋桨部分和平衡块的质量;Je为俯仰轴的转动惯量,为俯仰轴的俯仰加速度,ε为俯仰轴的俯仰角;Lp代表横侧轴到电机的距离;Jp为横侧轴的转动惯量,为横侧轴的转动加速度,p为横侧轴的转动角,若横侧角为零,则sin(p)为零,没有力传递给旋转轴;Jt为旋转轴的转动惯量,为旋转轴的旋转角加速度,r为旋转轴的旋转角(rad/s),即偏航角;G为螺旋桨的悬浮力。其电气参数如表2所示。

表2 电气参数Table 2 Electrical parameters
由于旋转轴的动力来自螺旋桨横侧轴倾斜时产生的水平方向升力,它的输出作为横侧轴的输入,因而只要对横侧轴和俯仰轴进行控制,就能达到姿态优化的目的。
同时,国有企业的大多数金融系统都采用先进的财务软件来管理和控制日常业务。由于缺乏专业知识,他们只能简单地处理日常财务程序,并没有真正了解财务软件信息自动化的管理和控制功能,缺乏有能力的财务会计[3]。
1.3模型机解耦器设计
两个电机中一个电机的电压是由横侧轴和俯仰轴控制器共同作用决定的,而改变控制器输出必然对另一电机的电压有影响,所以被控对象系统可以看作是一个双输入双输出的耦合系统[2]。由于Tg是常数,与V1和V2无关,设计解耦器时忽略Tg,由式(1)和式(2)可得到横侧轴和俯仰轴运动方程的传递函数为
写成状态方程为
设解耦器的传递函数阵为D(s),采用对角线矩阵综合法求解耦器阵,即
得解耦器阵为
2 控制器设计
2.1模糊控制算法设计
由于三自由度直升机具有强耦合、非线性等特点,采用传统的控制方法很难得到满意的控制效果。模糊控制是基于规则的控制方式,不依赖于被控对象的精确模型。对于那些难以获取系统的数学模型或不易掌握动态特性的被控对象,模糊控制是非常适用和有效的[9-10]。
本文采用二维模糊控制器,以系统的偏差E和偏差变化率EC为输入语言变量,以U作为输出语言变量。针对三自由度直升机模型的特性,选取系统误差E的基本论域为(-6,+6),对应的模糊论域为{-6,-4,-2,0,+2,+4,+6},取7个模糊子集,语言变量取为{负大,负中,负小,零,正小,正中,正大},用NB、NM、NS、ZO、PS、PM、PB表示。误差变化率EC的基本论域、模糊论域、模糊变量的选取与误差E的相同。隶属函数为高斯型函数和三角形函数的复合型,即(-6,-4)和(+4,+ 6)采用高斯型函数作为模糊集合的隶属函数,(-4,+4)采用三角形作为模糊集合的隶属函数,其偏差E的隶属函数如图3所示,误差变化率EC的隶属函数相同。
输出语言变量U的基本论域为(-6,+6),其对应的模糊论域和语言变量与误差E相同,采用三角形隶属度函数,如图4所示。
根据系统的动态行为,建立模糊控制规则如表3所示。
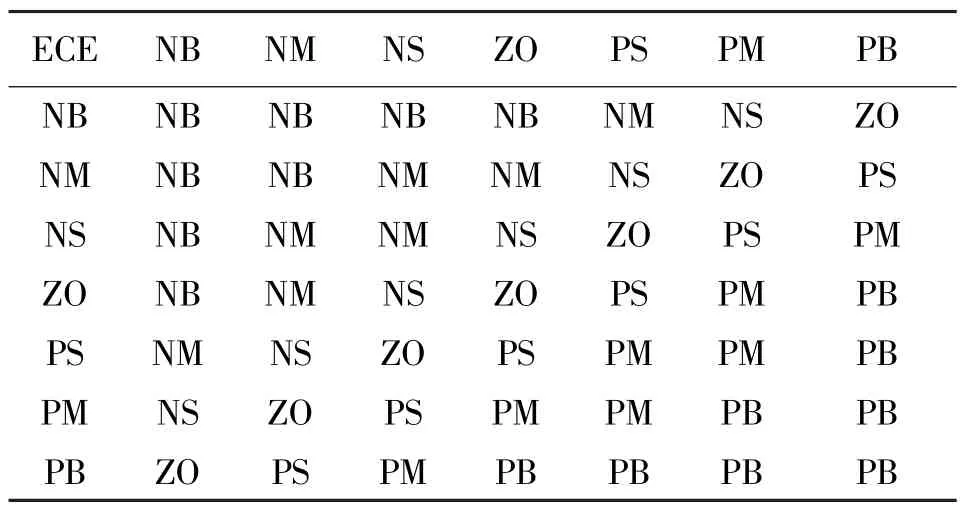
表3 模糊控制规则(U)Table 3 Fuzzy control rules(U)
本文采用Mamdani推理,解模糊化规则选择bisector法。
2.2模糊积分控制器设计
模糊控制器具有动态性能好,不依赖于被控对象的精确数学模型,但模糊控制的稳态性能较差,无法消除稳态误差,不适合于控制精度要求高的系统。因此,本文设计了模糊积分控制,既有模糊控制的良好动态性能,又有积分控制的良好稳态性能,能够达到快速和准确的控制效果。模糊积分控制器的结构图如图5所示。
通过解耦直升机模型的俯仰轴和横侧轴的控制仿真结构图如图6所示。
3 仿真实验
3.1单轴模型的仿真结果
三自由度直升机系统的俯仰轴与横侧轴的耦合被解耦后为二个单变量系统。考虑 Tg= 3.713 7,给定俯仰角度为10°时,系统的PID控制与模糊控制的响应曲线如图7所示。由图7可见,模糊积分控制具有良好的控制品质,调节时间为0.98 s,基本没有超调,稳态误差为零;PID控制超调相对较大,调节时间在1.2 s左右。相比之下,模糊积分控制要优于PID控制。给定横侧角度为10°时,系统的PID控制与模糊控制的响应曲线如图8所示。可见,模糊积分控制的调节时间为2 s,基本没有超调,稳态误差为零;PID控制的超调量为5%,调节时间在2.5 s,模糊积分控制同样优于PID控制。
3.2三轴模型的仿真结果
三自由度直升机系统控制仿真结构如图6所示,给定俯仰角度和横侧角度为10°,旋转速度为20°/s时,模糊积分控制和PID控制的俯仰轴响应曲线如图7所示,横侧轴响应曲线如图9所示,旋转轴的响应曲线如图10所示。可见,本文设计的模糊积分控制具有良好的控制品质。
在15 s时,分别给3个轴施加一个单位阶跃信号作为扰动信号,3个轴的模糊积分控制响应曲线如图11所示。可见,本文设计的算法具有良好的抗扰性。
当系统模型传递函数的参数分别增大15%和减小15%时,俯仰轴、横侧轴和旋转轴的模糊积分控制响应曲线分别如图12、图13和图14所示。从图中可见,当对参数增大或减小,系统都可以很好的趋于稳定,时间也相差不多,且没有出现超调、发散等问题,这表明我们设计的控制系统具有很好的鲁棒性。
4 结束语
由于三自由度直升机系统具有不稳定性、非线性、强耦合等特点,传统的控制算法很难得到满意的控制效果,本文设计了模糊积分控制算法,针对横侧轴和俯仰轴之间的强耦合关系,设计了解耦阵,实现了横侧轴和俯仰轴的解耦,可以对两个单变量系统设计控制器,进行了直升机模型的飞行姿态控制研究。通过仿真研究了三自由度直升机模型的抗扰动能力和鲁棒性分析,并将本文设计的控制算法与传统PID控制进行了控制效果对比分析,仿真结果表明,本文设计的模糊积分控制算法具有满意的控制效果,抗干扰能力和鲁棒性强。
[参考文献]
[1] 吕俊刚,汪家道,陈大融.微型无人直升机旋翼操纵机构设计及分析[J].清华大学学报,2002,42(11):1484-1487.
[2] 张乐,吴金男,毕少杰.基于模糊PID的直升机模型飞行姿态控制[J].控制工程,2013,21(3):387-390.
[3] 岳新成,杨莹,耿志勇.三自由度直升机模型的无静差跟踪控制[J].系统仿真学报,2007,19(18):4279-4283.
[4] 范才智,宋宝泉.平台上的无人直升机非线性预测姿态控制[J].控制工程,2009,17(1):9-13.
[5] KAZUO Tanaka,HIROSHI Ohtake,WANG HUOO.A practical design approach to stabilization of a 3-DOF RC helicopter[J]. IEEE Transactions On Control Systems Technology,2004,12(8):2985-2988.
[6] 赵云园.基于三自由度直升机模型的控制方法研究[D].成都:西华大学,2012:2-4.
[7] 王修岩,赵昌丽,李宗帅.三自由度直升机模型跟踪控制[J].计算机仿真,2010,27(6):98-102.
[8] 固高科技.三自由度直升机系统用户手册[Z].深圳:固高科技有限公司,2005.
[9] Kong Xiang-Ling,Li Hong-Xing,Dong Fang.Adaptive Fuzzy plus Integral Control for Double Variable Electric Furnace[J]. Research Journal of Applied Sciences,Engineering and Technology,2013,6(15):2784-2788.
[10] Wu Huai-ning,Wang Jun-wei,Li Han-xiong.Design of distributed H∞fuzzy controllers with constraint for nonlinear hyperbolic PDE systems[J].Automatica,2012,48(10):2535-2543.
(责任编辑 李亚青)
The Fuzzy Integration Control Based on Three-DOF Helicopter Model
ZHAO Jun,LI Hong-xing,CHEN Xiao-qian,XU Xiao-hui,KANG Wu-biao
(Automation College of Beijing Union University,Beijing 100101,China)
Abstract:In view of the instability,nonlinearity and tight coupling of three degrees of freedom helicopter system,a study on flight attitude control system of helicopter model has been done,with the use of fuzzy integration controller algorithm.Based on MATLAB simulation platform,a fuzzy integration control algorithm is studied for helicopter system,analyzed the robustness and anti-interference ability of the system,while comparing it with the traditional PID control algorithm.The result shows that the fuzzy integration control algorithm can effectively control the flight attitude of three degrees of freedom helicopter model,and has favorable dynamic quality,robustness and anti-interference ability.
Key words:Three-DOF helicopter;Fuzzy integration control;Simulation;Robustness
[中图分类号]V 275
[文献标志码]A
[文章编号]1005-0310(2016)02-0040-06
DOI:10.16255/j.cnki.ldxbz.2016.02.007
[收稿日期]2015-12-24
[基金项目]北京市“启明星”大学生科技创新项目(201511417SJ041)。
[作者简介]赵俊(1994-),女,陕西省宝鸡市人,北京联合大学自动化学院学生,研究方向为智能控制和控制网络。
[通讯作者]李红星(1956-),男,山西省忻州市人,北京联合大学自动化学院教授,研究方向为网络化智能控制。E-mail:zdhthongxing@buu.edu.cn
