主动悬架系统事件触发自适应渐近跟踪控制
2023-08-21王昊宇邓英杰赵丁选王建涛
王昊宇,邓英杰,赵丁选,∗,王建涛
(1.燕山大学 机械工程学院,河北 秦皇岛 066004;2.燕山大学 车辆与能源学院,河北 秦皇岛 066004)
0 引言
随着人们对车辆行驶平顺性和乘坐舒适性的要求越来越高,传统的被动悬架系统已无法满足这些需求。主动悬架系统具有可以自适应动态调节刚性和阻尼特性的作动器,可以大大提高车辆的行驶平顺性和乘坐舒适性,其研究已成为近些年的热点[1]。
截至目前,学者已经提出了很多主动悬架系统的控制方法,例如PID 控制[2]、自适应控制[3]和H∞控制[4]等。文献[5]在非线性模型的基础上利用自适应反步控制方法,设计了一种反步控制器,提高了列车行驶的平顺性和舒适性;文献[6]利用模糊控制和H∞控制,并且考虑了汽车座椅的振动,设计了一种自适应PID 半主动悬架控制器;庞辉等[7]在基于T-S 模糊模型的1/4 车辆悬架上应用自适应控制和滑模控制,通过自适应控制降低了滑模的抖动;贾忠益等[8]针对具有控制量和输出硬约束的不确定系统,设计了一种具有摩擦力补偿的控制器;文献[9]为解决具有前馈控制的执行器延迟问题,在主动悬架系统中采用了有限频率H∞控制算法。随着各类高精度作业对车辆位姿稳定的需求日益苛刻,减小甚至消除主动悬架系统稳态跟踪误差具有重要的现实意义。上述文献中,PID 控制算法无法严格证明闭环系统的稳定性和跟踪误差的收敛性,自适应控制算法很难解决非线性系统模型的不确定非线性项,跟踪精度不高,H∞控制算法要求线性的系统模型,且无法在外部激励存在的情况下消除稳态误差,而针对非线性模型的基于常规反步法的控制策略,仅能实现跟踪误差的一致最终有界,跟踪精度受调节参数影响,鲁棒性差,无法解决主动悬架系统在未知模型动力学和复杂路况下的渐近高度跟踪控制问题。
非线性系统[10]在含有未知模型动力学和环境干扰下的渐近跟踪控制问题是近年来控制学界关注的热点。文献[11]首次提出采用积分有界函数作为σ修饰的自适应律,保证观测误差的渐近收敛;文献[12]和[13]在严格反馈系统和非严格反馈系统的渐近跟踪控制中应用了积分有界函数的思想;文献[14]采用Nussbaum 算子构造控制器,根据Nussbaum 算子的有界性证明跟踪误差的渐近收敛。但是,目前较少有研究解决主动悬架的渐近跟踪控制问题。
上述的文献多采用连续型的控制策略,这就导致了这些控制策略的信号传输方式容易造成通信资源的浪费,而事件触发控制就解决了这个问题,即仅在采样误差超出设定阈值的时候才进行信号采样。这样不仅具有非周期信号采样的特点,更符合通信受限的实际作业情况,大大减少了通信的负担,而且一定程度上保障了系统性能的发挥。文献[15]针对具有时变全状态约束的座椅系统和车辆电磁主动悬架系统,分别设计了两种事件触发控制器,证明了系统中所有的误差信号均是有界的。将事件触发机制应用于主动悬架系统的渐近跟踪控制,有待探索。
针对以上问题,本文以1/4 车辆主动悬架系统的悬架高度为控制目标,设计了一种事件触发自适应神经渐近跟踪控制方案。首先对未知模型动力学、路面输入和虚拟控制律等采用径向基函数神经网络进行逼近,提取最小学习参数并设计单参数自适应律。然后在控制律和自适应律的设计中采用积分有界函数,设计变量事件触发条件。最后基于Lyapunov 直接法和Barbalat 引理从理论上证明闭环系统的渐近稳定性,并通过仿真验证控制方案的优越性。
1 问题表述
1.1 1/4 车辆悬架模型及数学模型
主动悬架力学关系及变量描述如图1。根据力学分析,1/4 车辆悬架模型的动力学方程可描述为

图1 二自由度1/4 车辆悬架模型Fig.1 The model of 2-degree-of-freedom quarter vehicle suspension
式中,Ft=ka(z1-z2),Fv=ca(1-2),Fw=kt(z2-zr),Fr=ct(2-r),mb是簧载质量,mu是非簧载质量,Fv代表阻尼力,Ft代表弹簧力,Fw代表轮胎弹簧力,Fr代表轮胎阻尼力,u代表主动悬架系统的控制输入,ka代表悬架刚度系数,kt代表轮胎刚度系数,ca代表悬架阻尼系数,ct代表轮胎阻尼系数。
令x1=z1是车身竖直方向的位移,x2=1是车身竖直方向的速度,x3=z2是簧下竖直方向的位移,x4=2是簧下竖直方向的速度,则式(1)可表示为
控制目标:对于具有连续二阶导数的参考信号zd(t),通过对u的控制律设计可以使z1渐近跟踪到zd。
假设式(1)和(2)中的所有变量都定义在一个紧集中。
引理1[16]定义在紧集的任意连续函数f()都可以用径向基函数神经网络表示为
式中,Wf表示神经网络的权重向量,ε是以|ε|为界的近似误差,满足|ε|≤,ϕ()是基函数的向量,并且满足
引理2[12]对于任意变量s,它都满足
式中,σ(t) 是一个正的积分有界函数, 即,且> 0。
2 控制设计和稳定性分析及其他特性证明
2.1 控制设计
定义高度跟踪误差
对ze求导可得
设计虚拟控制律
式中,kz是调节参数,且kz>0。
定义跟踪误差
将式(8)和(9)代入式(7)可得
对式(9)求导,并将式(2)代入可得
将式(13)代入式(12)可得
设计实控制律u,
式中,t∈(tj,tj+1],tj为事件触发时刻,且j=1,2,…,ωr(t)是连续控制律。
定义控制误差er(t):
设计触发时间点tj和下一事件触发时间点tj+1,即触发条件为
式中,0
其中,δ1∈(-1,1),δ2∈(-1,1)。
式中,βr=max{br/[mb(1-ar)]+r,‖Wr‖}且ψr=‖ϕr‖+1。
设计ωr(t),即
式中,kr>0 是调节参数,r是βr的估计值。
式中,λr是调节参数,λr>0。
2.2 稳定性分析及其他特性证明
2.2.1 稳定性分析
定理对于式(1)和(2)描述的车辆主动悬架系统,满足假设1。如果采用式(15)的控制律,采用式(17)的触发条件和式(22)的自适应律,则ze和se可以实现渐近稳定。
证明选取Lyapunov 函数:
联立式(11)、(21)和(23)可得
对式(25)积分,并利用引理2,可得
因此可以得出V(t)-V(0)是有界的。将式(26)移项整理可得
由Barbalat 引理[17]推断式(27)中ze和se均趋向于零,证毕。
2.2.2 其他特性的证明
由上述定理证明可知se趋向于零,又由式(15)和式(20)可知,控制输入u是有界的。[kt(z2-zr)+ct(2-r)]/mu可视为有界的外部扰动。而式(29)是一个经典的二阶阻尼系统,所以z1-z2和1-2是有界的,因此,式(28)中1最终可以收敛到一个有限值,这意味着可以达到稳定乘坐舒适性的效果。
根据图1,车辆的路面附着力与地面支持力有关,而地面支持力由Fw和Fr所控制。因此分别在式(2)中等式的两边减去r,可得
3 仿真验证
为验证针对1/4 车辆悬架模型提出的控制方法的有效性,分别选择以下参数:
路面的扰动信号设置为
径向基函数神经网络采用11 个神经元,控制参数设置为kz=5,kr=2,ar=br=0.2,λr=0.5,其中积分有界函数设置为σr=0.3exp(-0.02t)。仿真时间设置为10 s。
为验证控制策略的优越性,以鲁棒阻尼策略[18]为例进行对比。鲁棒阻尼策略的控制律设置:
其中,控制参数和上述保持相同。仿真结果如下所示。
图2 和图3 展示了悬架高度z1和轮胎高度z2在两种控制策略之下的轨迹变化,可以发现:本文提出的渐近跟踪控制策略相比鲁棒阻尼策略明显具有更高的跟踪精度,可以更快地实现跟踪误差的收敛。图4 给出了本文控制策略中自适应参数r的演变过程,可以看出直接自适应控制的设计使r最终趋向于稳定且有界。图5 对比了两种控制策略下的控制输入,对比发现本文的控制策略比鲁棒阻尼策略更具有显著的效果,收敛速度更快。图6 给出了本文控制策略下事件触发间隔时间的变化,该策略共有128 个触发时刻,最长的触发间隔时间为0.93 s,最短的触发间隔为0.01 s。相比之下,鲁棒阻尼策略的信号采样周期为0.01 s,共有1 001 个采样次数。因此,本文所采用的事件触发控制可明显地在控制器至执行器通道上节省通信资源。
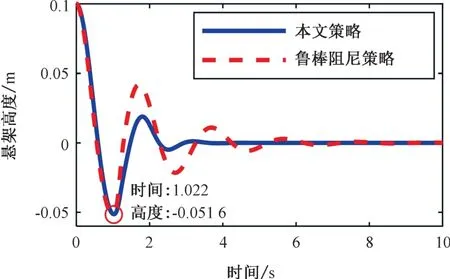
图2 两种控制策略的悬架高度对比Fig.2 Comparison of suspension heigh between the two control strategies
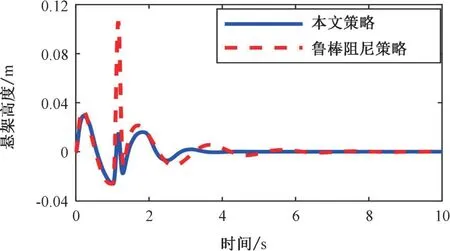
图3 两种控制策略的轮胎高度对比Fig.3 Comparison of tire heigh between the two control strategies

图4 自适应参数的变化Fig.4 Change in adaptive parameter
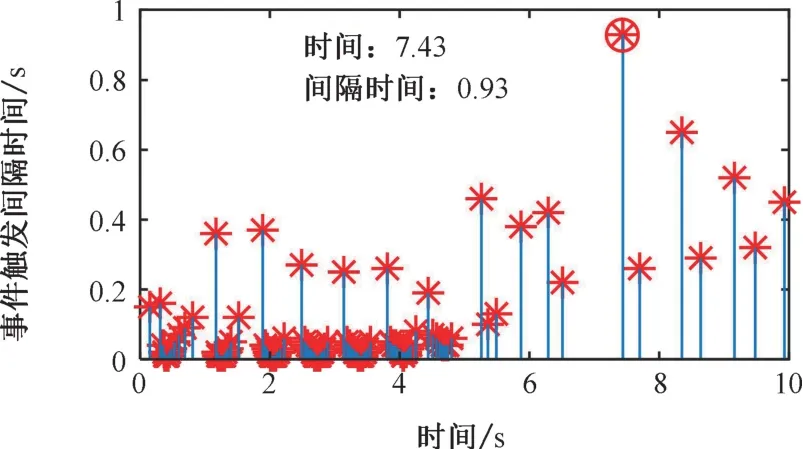
图6 本文策略下的触发时间间隔Fig.6 Inter-event time in the proposed scheme
4 结论
本文提出了一种主动悬架系统的事件触发自适应神经渐近高度跟踪控制方案,利用了径向基函数神经网络、最小学习参数化技术和积分有界函数等,并通过仿真试验验证了其优越性,以下为该方案的优点:
1)实现了对未知模型动力学和路面输入双重作用下主动悬架跟踪误差的渐近收敛,满足了车辆行驶平稳性所需的高精度要求;
2)采用最小学习参数化技术构造了单参数自适应律,确保了控制策略的计算简便性;
3)事件触发控制的设计减少了控制器至执行器通道上信号的采样频率,可以有效地节省通信资源。
本文所提出的方案并不局限于1/4 车辆悬架系统的高度跟踪控制,也可以根据相同设计思路应用拓展到半车模型乃至整车模型的主动悬架的高度跟踪控制。