从列车无人到中央无人
—— 关于轨道交通自动化发展的思考
2022-03-21马能艺
马能艺
(上海申通地铁集团有限公司,上海 201103)
1 全自动运行概述
目前全自动运行已成为全国轨道交通信号系统建设的首选制式。根据2020年的统计数据,全国超过75%的新线采用全自动运行模式。在启用全自动运行模式的新线中大多数采用最高自动化等级(GOA4级)的无人值守全自动运行(UTO)。轨道交通自动化等级示意如图1所示。
无人值守全自动运行的优势在于高效、经济并富有科技感,而它的不足之处是在无人值守状态下,一旦由设备故障或突发事件造成无法续用全自动运行时,可能导致列车迫停区间,会对运营产生重大影响。为此,全自动运行系统在具备大量常规功能之余也增设相应的应急功能,旨在使列车在非正常状态下尽可能维持全自动运行,至少可带病自动运行至下一车站,再由工作人员登车处置,以符合GB/T 32590.1-2016《轨道交通 城市轨道交通运输管理和指令/控制系统 第1部分:系统原理和基本概念》中对GOA4级系统的特定要求(表1)。
综上所述,只有当列车迫停区间的概率变得极低后,才能在管理模式上实现无人值守,真正体现出GOA4级全自动运行“减员增效”的价值。
在无人值守状态下,原司机的驾驶和应急处置职责由系统自动或调度员远程处置来代替,极端情况下需要由多职能队员登车处置。由于全自动运行线路控制中心设备的自动化水平与人工驾驶线路大体相当,对调度员而言,工作压力未减反增,未能共享自动化带来的便利。
2 全自动运行系统的整体自动化需求
自动化等级(GOA)分为5级(从0级到4级),GOA4为最高。目前自动化等级的划分多聚焦在列车上是否实现无人值守,相较而言,对控制中心的自动化要求和减员要求远低于列车。由此可见,全自动的“全”是有所欠缺的。
以GOA 4级全自动运行线路—上海市轨道交通15号线为例,控制中心调度员的工作除既有的行车调度和乘客调度外,还新增车辆监控,包括监视复示在中央显示屏上的列车驾驶台信息和在车载设备故障时对列车进行远程操作等。为此运营控制中心(简称“控制中心”)共设置7个调度席位:4个运营调度席位(负责行车调度、乘客调度和车辆监控工作)、2个设备调度席位(负责电力调度、环控调度和维修调度)以及1 个调度长席位。
对于设有备用控制中心的线路,还需在备用控制中心配备运营调度员和设备调度员各1名。考虑到灾备,控制中心与备用控制中心一般异处设置,调度员无法兼顾两处,从而造成在极端情况下全自动运行线路的调度员需配备10人以上,而人工驾驶线路一般只需配备运营调度和设备调度共4人即可。由此可见,全自动运行的中央调度员数量要远多于人工驾驶线路中的调度员数量,在调度员配备上不仅未能减员,反而造成增员。
正常状态下,控制中心可实现自动下发静态运行图以控制全自动列车跑图,而在需要排查故障或运营调整时,需调度员介入进行调度指挥。虽然在目前的普遍观念中对调度员处理复杂状况的信任度超过对系统,可事实上由于调度员的失误而扩大运营影响甚至造成运营事故的情况时有发生。
随着人工智能、大数据等高新技术的快速发展,全自动运行系统(UTO)的下一步发展有望将重心从列车转向控制中心,提升调度指挥的自动化程度。
3 基于中央自动化水平的全自动运行等级新分类的设想
UTO在车内无人值守的基础上,中央的自动化水平也有高下之分,可据此分为几个等级,所设想的分级如表2所示。
由于定量存在难度,表2作为一种分级的设想,以低、中、高来表示自动化程度。
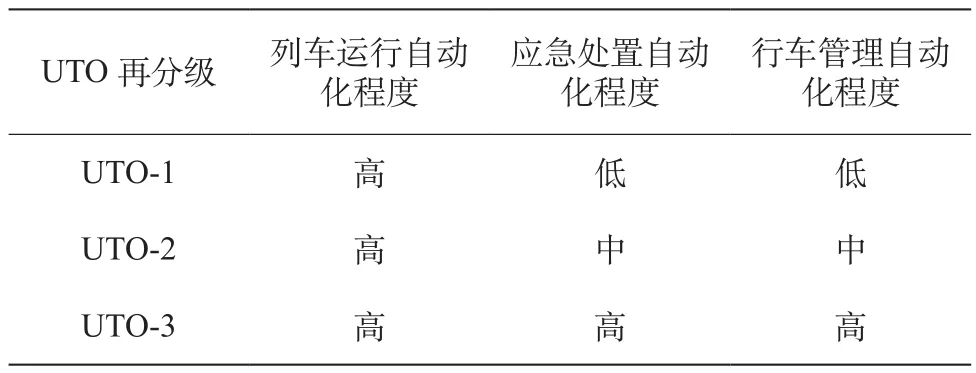
表2 UTO再分级
其中,UTO-1级具备列车运行的高度自动化,而应急处置具有一定的自动化水平,但多数需要人工确认甚至远程处置,在行车管理尤其是运营调整上多由调度员进行谋划和实施,自动化水平较低。
UTO-2级是在列车全自动运行的基础上实现较高自动化水平的应急处置,普通情况均由系统自动处置,仅在复杂情况下由人工干预处置。在行车管理中,当出现一般问题时由系统自动进行运营调整,出现较复杂情况时系统为调度员提供辅助决策以提升处置效率和正确率。
UTO-3级则在列车运行、应急处置和行车管理上均达到高度自动化,甚至全自动化,实现“中央无人”。
UTO-3级是轨道交通自动化发展的终极目标,而目前已开通及在建的全自动运行线路都仅处于UTO-1级。为使轨道交通的自动化水平从UTO-1级向UTO-3级进化实现中央自动化,应对应急处置自动化和行车组织自动化提出更高的要求,让系统代替调度员对各种情况进行处理。
4 应急处置自动化要求
为提升中央自动化水平,在应急处置等方面需要进一步提高系统、检测设备的性能要求及智能维护水平。
4.1 对系统的高可用性要求
在实现应急处置自动化之前,需先考虑如何减少需要应急处置的情况。
首先,应精简设备架构。因为每个设备都有发生故障的可能性,较少的设备数量意味着在客观上可减少潜在故障点。目前的轨旁设备全电子化以及车车通信等均朝着设备精简的方向发展。
其次,在部件可靠性暂时难以实现质变的情况下,应确保关键设备的有效冗余,实现故障时主备间的无缝切换。设备的冗余与架构精简并不矛盾,因为精简的是架构体系,冗余的是局部设备,整体上的设备数量是减少的。
再次,冗余设备应具备单系脱机维护能力,一旦单系故障可脱机维护,实现边运营边维护,便可达到在维护期间使乘客无感的效果。
最后,通过状态修在设备发后故障之前进行修理或更换,防患于未然,减少故障发生的可能性。
4.2 对监测设备的高可信度要求
应急处置自动化的基础就是需要“高可信”的设备。目前轨道交通中所使用的各类监测设备,如车门和站台门防夹探测、烟火探测、障碍物探测、防淹门探测、库门探测等由于可靠性不足的原因有可能产生误报警,而由此产生的误报警信息一旦与信号构成联锁关系就会造成运营中断。此情况即为采集的信息可信度不高所带来的隐患。
确保监测信息的高可信度是实现智能监测的关键。为此,需要更智能的传感器、更强大的图像识别能力,通过获得更多样的精准数据信息增加判断的准确率,让监测设备可以像人一样分辨出真正的危险,甚至表现优于人类。
4.3 对智能维护的要求
全自动运行需要高水平、系统化的智能维护作为支撑,而实现高可信监测仅是实现智能维护的必要条件之一。智能维护需基于大数据驱动,面向感知、诊断、预警、决策和协同全流程进行智能监测、智能分析和智能维护管理。
智能监测结合智能分析可根据设备状态进行预警,当设备出现性能劣化趋势时及时上报告警,以启动实施状态修。同时通过“全设备监控”实现对突发故障或紧急情况实时响应,启动自动处置功能或辅助工作人员进行处置。
智能维护管理旨在实现设备健康度管理和维保资源管理,系统化地实时掌握全设备状态以及备品备件、维护人员和维护工具等情况,实现组织架构、业务流程、检修制度、资源管理的创新与提升,推进维护工作向智能、融合、高效转变。
5 行车组织自动化要求
目前行车组织的自动化主要体现在全线列车可根据运行图自动跑图,由于运行图内容较为固定,对于客流突变的情况适应度不足。因此需要通过智能调度、大数据分析等技术手段对客流进行预测,同时通过监测手段掌握实时客流,借此形成动态运行图。根据实时客流自动投放或回收相应数量的列车,使客流与运能精准匹配。还可通过在线灵活编组功能,实现全自动联挂和解编,在不降低行车密度的情况下使车辆资源达到最优配置。如此既保障运输效率又实现节能最大化,达到降本增效的效果。
对于非正常行车组织,可通过完备的专家系统为调度员提供全方位的调度决策,甚至实现运营调整自动化,避免人为错误或延误的引入,实现中央减员直至无人。
6 结论与建议
为实现从列车到中央的高度自动化,智慧运维的发展至关重要。本文所表述的应急处置自动化要求和行车组织自动化要求受目前技术水平所限,未能达到真正意义上的全自动化,望今后通过技术发展不断提升全自动运行的自动化水平,逐步实现从列车到中央的全范围减员,充分发挥全自动运行的优势。