基于雷达威胁的路径距离最小航路规划算法
2022-03-08叶魏涛
叶魏涛,张 蔚
(电子信息控制重点实验室,成都 610036)
0 引言
随着战斗机速度及过载能力发展逐渐逼近人体承受极限和人工智能相关技术日渐成熟,未来战斗机将逐步往无人化、智能化方向发展[1-3]。战机实现自主化、智能化的一项重要工作便是其能感知战场态势,估计目标威胁大小,动态规划航路,完成作战任务。目前,无人机航路规划算法主要有遗传算法[4]、蚁群算法[5]、Voronoi 算法[6]以及A*算法[7]等。其中,A*算法是一种启发式确定搜索算法,较于遗传算法、蚁群算法等,其具有适用于各种复杂场景、灵活、计算量小等优势,且一定可获得最优解,而蚁群算法、遗传算法存在不确定性[8]。
通常基于A*算法的航路规划都将地形、雷达及武器攻击范围设定为圆形障碍区域,路径规划过程完全规避[9-11]。然而实际战场环境下雷达探测区域相互交叠,按常规方法可能无法实现航路规划。本工作通过栅格化航路规划区域,利用雷达目标间距离及对应探测概率的方法对其进行威胁表征,建立基于雷达威胁的路径代价函数,设计了复杂作战环境下的航路规划算法。
1 雷达方程与探测概率
1.1 雷达方程
1.2 雷达检测
雷达接收机接收到的信号s(t)既有目标散射回波信号x(t),又包含噪声信号n(t),通常采用匹配滤波器检测回波信号,输出最大可达到的瞬时信噪比SNR 匹配滤波器接收机工作原理框图如图1所示。
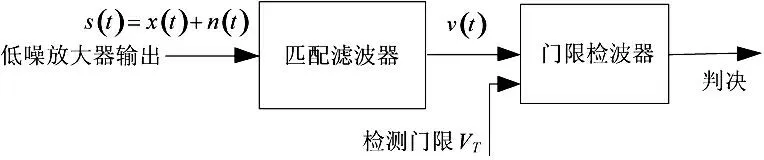
图1 匹配滤波器接收机工作原理图
虚警概率Pfa定义为当雷达回波信号中仅含有噪声时,信号s(t)的一个采样样本超过检测门限电压VT,导致将无雷达目标判断为有雷达目标,从而产生虚假警报的概率。假设回波信号中夹杂的信号为均值为0 的高斯白噪声,从而虚警概率为:
通常雷达都会使用特定的虚警概率计算恒虚警条件下的雷达探测概率,由于零阶贝塞尔函数计算较为复杂,通常采用近似算法计算雷达检测概率,如North 于1963 年提出一种非常精确的近似公式,如式(11)所示。

2 A*算法基本原理
A*算法是一种经典的启发式搜索算法[8],它将航路规划区域进行栅格化,并以栅格中心点作为路径节点,计算路径代价进行量化比较,计算从出发点Start_Point 到当前节点n 的已经付出的代价g(n),并估计当前节点n 到目的地节点End_Point 的预计代价h(n),如下页图2 所示。从而在当前节点n 总的路径代价函数f(n)为:
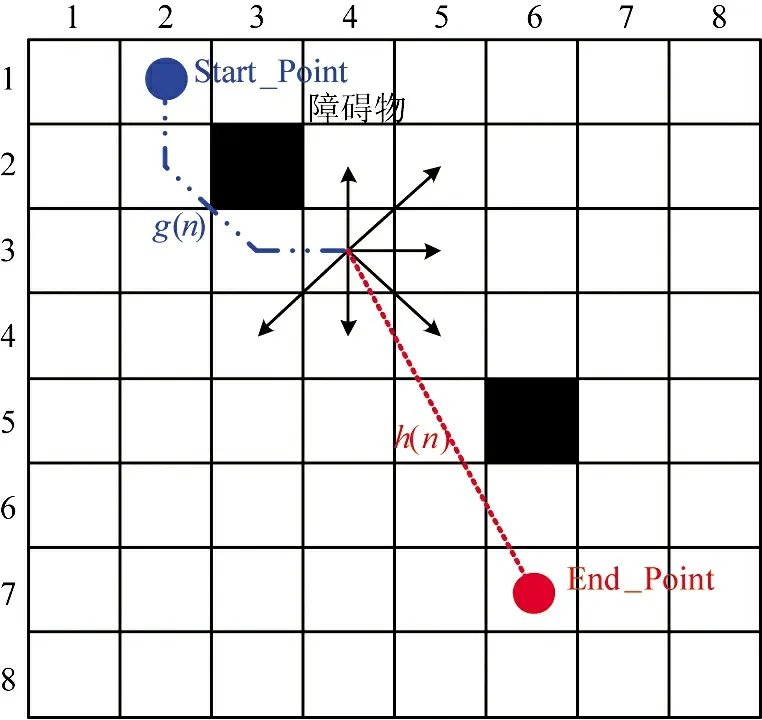
图2 A*算法区域搜索示意图

A*算法在搜索过程中构造两个路径节点列表,其中,Open 列表用于记录从出发点到当前节点的候选扩展节点,如图2 中的节点{(1,1),(1,3),(2,1),…}等,Close 列表用于存储已经被扩展的节点,如图2 中的节点{(2,2),(3,3),(3,4)}。A*算法将当前节点的多个待选节点加入Open 列表中,从Open 列表中选出代价函数最小的节点作为下一个路径节点进行路径扩展,将其加入Close 列表,重复上述过程,直到在Open 列表中寻找到目标节点,完成路径规划。
3 基于雷达威胁的路径最小航路规划建模
3.1 威胁空间离散表征
航路规划首先需要对无人机周围空间进行网格化,并对各网络节点进行威胁表征。无人机在执行任务的飞行过程中通常会遭遇雷达、火炮、导弹等目标的威胁,会以一定概率被威胁雷达发现或被火炮、导弹等攻击。在此模型中,我们暂且仅对相互独立工作的雷达探测无人机的范围及无人机被雷达发现的概率进行空间威胁建模,利用无人机在各网络节点上被雷达探测发现的概率对其进行威胁度大小表征,火炮和导弹对无人机的攻击范围及杀伤概率也可利用类似方法进行建模表征。
在地理坐标系下,假设无人机所在位置为(Lon_UAV,Lat_UAV),在其周边建立一个经纬度跨距分别为(Lon_area,Lat_area)的航路规划区域,对该区域分别以(Lon_step,Lat_step)的经纬度步长对该区域进行网格化。假设无人机通过侦察等手段发现该区域内及周围存在多部雷达,各雷达编号、位置分别为Radar_1 ( Lon_Radar1,Lat_Radar_1),Radar_2 (Lon_Radar_2,Lat_Radar_2),…,Radar_l(Lon_Radar_l),…。从而可计算航路规划区域内各节点(Lon_area(i),Lat_area(j))与各部目标雷达之间的距离为Distance_area_2_Radar_l(i,j)。
再根据式(7)计算当无人机在航路规划区域内各节点上被各雷达照射时各雷达接收到的电磁回波信号信噪比SNR,从而根据式(11)计算当无人机在各节点上被各威胁雷达探测发现的概率PD_radar_m_area(i,j)。从而无人机在各节点可能被威胁雷达探测发现的概率为:
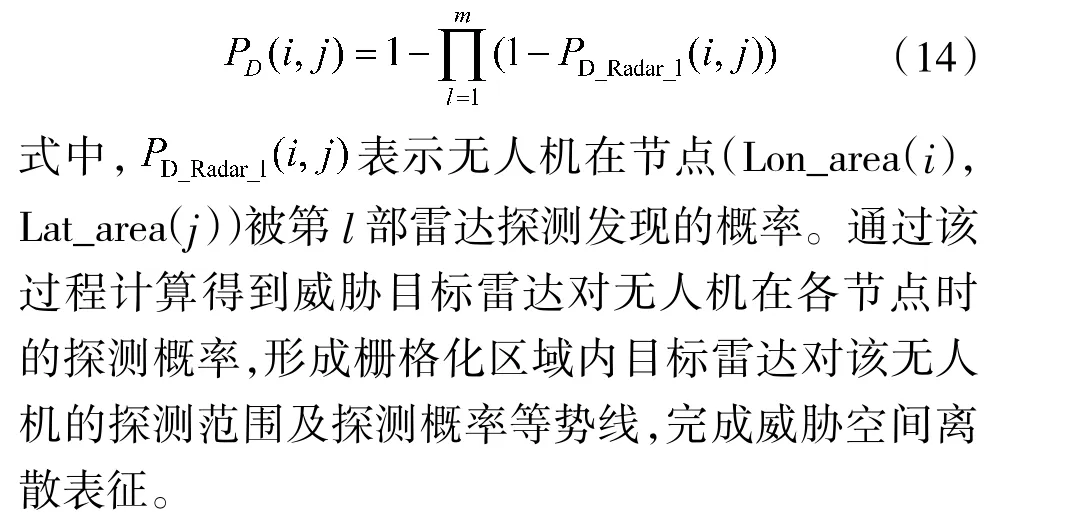
3.2 基于威胁最小的最短路径代价函数
3.2.1 代价函数
在无人机航路规划算法中,主要考虑两方面的代价,一个是路径距离代价,降低路径距离一方面可以提高无人机作战效率,同时无人机航程较小,需要尽量减小航行距离;另一个是安全代价,所谓安全代价是指无人机被目标雷达探测发现的概率、被目标武器攻击的概率等。在此建立了以无人机安全为前提条件的路径代价函数,如式(15)所示。其物理意义为无人机能成功通过该节点的前提条件是该无人机未被各目标雷达探测发现。
式中,系数k 是大于等于1 的因子,它是反映在航路规划过程中路径距离代价与安全代价之间权重大小的因子:k 越大,安全代价即减小被目标雷达探测发现概率权重更大,从而会牺牲距离代价因素;反之,k 越小,减小路径距离代价的权重更大,从而会牺牲部分安全性。
3.2.2 启发函数
考虑二维平面内的无人机航路规划,首先通过下式将地理坐标系下的雷达位置坐标、无人机位置坐标及规划区域位置坐标转化到地球直角坐标系下[13]
其中,Re=6 378.137 km,是地球长半轴半径,e 为地球第一偏心率,约为0.081 82。从而可在直角坐标系下计算待选节点与目标位置(xEnd,yEnd)的距离作为启发函数h(n),即

4 航路规划算法仿真
4.1 仿真设计
在某次任务中,无人机处于东经121.2°,北纬31.2°的位置,向西南方向飞行,去往东经120.2°,北纬28.4°的目的地执行任务。通过侦察及前期机上存储的威胁目标信息获取得到了周边区域有4 部雷达,其位置及性能参数如表1 所示。

表1 目标雷达及其探测距离性能
无人机根据目的地位置生成一个矩形规划区域,区域范围为从东经118°到东经122°,从北纬28°到北纬32°。该区域经度方向纵深为393.2 km,纬度方向纵深为445.30 km。对该区域进行网格化,经度方向网格大小为0.02°,纬度方向栅格大小为0.02°,对应的距离分别约为1.93 km 和2.23 km。该区域4 部雷达对无人机的探测概率表征如图3 所示。
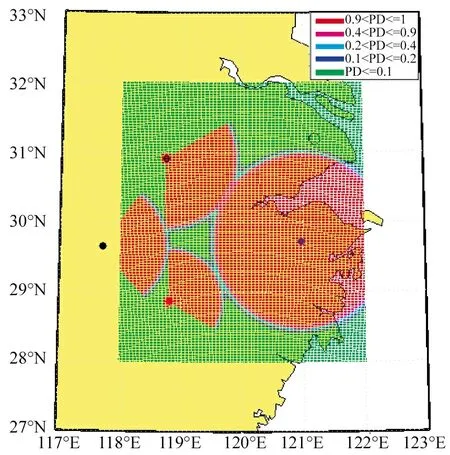
图3 路径规划区域雷达探测概率分布
由上可知,航路代价函数中的节点间距离分别为纬度方向移动步长为1.93 km,经度方向移动步长为2.23 km,对角方向移动步长为2.97 km,如图4 所示。
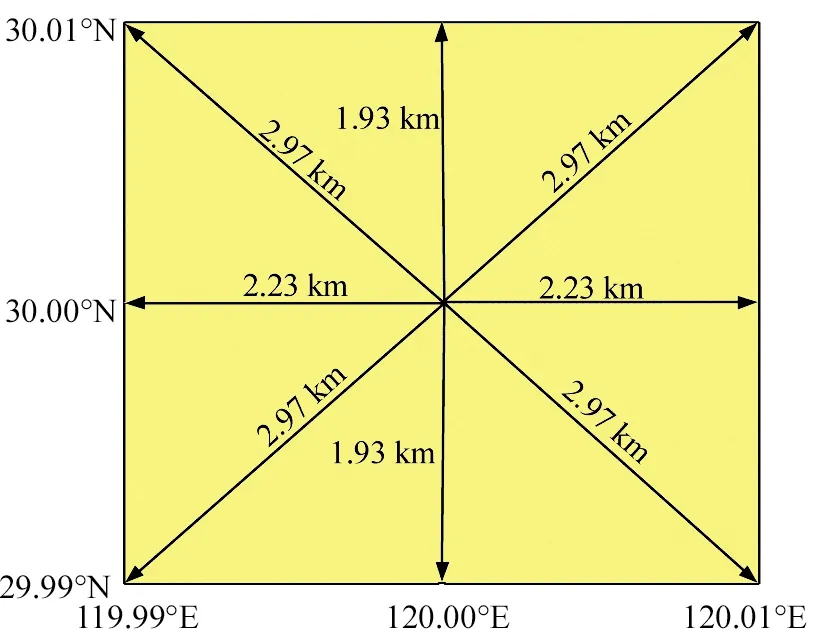
图4 节点间距离步长
5 仿真结果分析
本文基于雷达威胁的路径最小航路规划算法通过Matlab 仿真实现,根据对安全代价和路径距离代价的权重设计不同分别仿真了当k 分别为1,2,3 情况下的航路规划实现,结果如图5 所示。
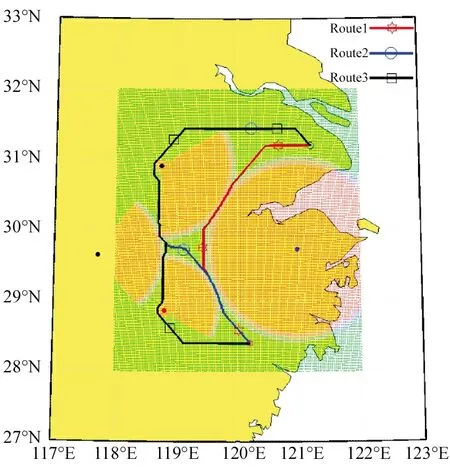
图5 基于雷达威胁的航路规划结果
由图5 可知,通过将路径规划区域进行栅格化,并对其基于雷达探测概率进行威胁量化表征,无人机可有效避开雷达有效探测区域,提高无人机在战场环境中的生存机率。
各路径对应的安全系数权重及对应航路上路径距离代价及安全代价如表2 所示。Route 1 安全系数k 最小,所以规划路径距离最小,无人机被雷达探测发现的节点最多,显然,无人机被雷达发现的概率也最大。Route 3 中的安全系数k 最大,虽然牺牲了路径距离代价,但是无人机被地雷达探测发现的节点数显著减少了,尤其是被探测概率大于25%的路径节点大幅减少,极大地提高了无人机战场环境下的生存机率。
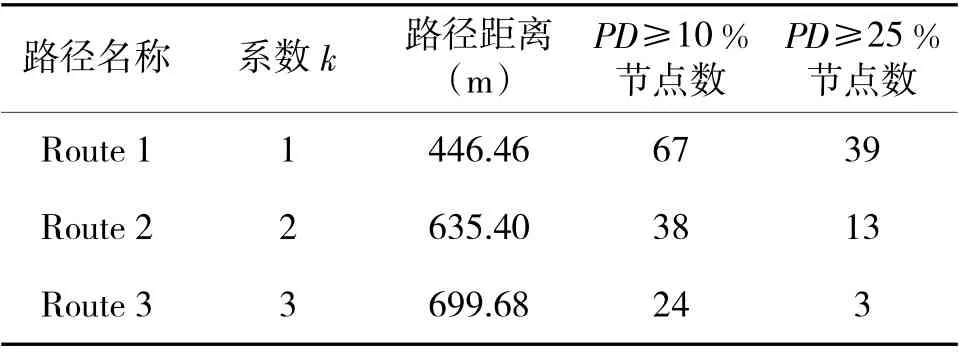
表2 航路规划结果及路径代价参数
6 结论
未来作战逐渐向无人化、智能化方向发展,战斗机尤其是无人作战飞机感知战场态势变化,并自主重规划航行路线显得尤为重要。本文通过构建基于雷达探测概率的威胁空间离散模型,建立了路径长度代价和路径安全代价的路径代价函数模型,设计了基于雷达威胁的A*航路规划算法。通过对经度范围为118°~120°,纬度范围为28°~32°的地图区域(393.2 km ~445.30 km),运用A*算法完成了不同安全代价和航程代价的航行路径,根据不同安全代价权重给出了相应的最短规划路径结果,对比分析了安全权重系数k 对航路规划路径距离代价和安全代价的影响。
本文所属路径规划结果符合预期效果,是有效可行的,且应尽量选取较大安全系数k 值,适当牺牲路径距离以保证无人机的相对安全。
