基于油电混合动力技术在无人机中的应用 Application of Hybrid Electric Technology in UAV
2021-11-30王飞WANGFei
王飞 WANG Fei

摘要: 目前无人机动力多以纯电动机或者纯燃油发动机为主,纯电动无人机易操控,稳定性高,但是续航里程较差,而纯燃油发动机可以轻松解决续航问题,但发动机对空气中氧浓度要求高,且控制响应灵敏性能较差,很难准确控制和协调驱动旋翼的桨距、转速等,不能有效的保证无人机稳定飞行,高空高速及精确定位的性能。本文通过分析油电驱动的产生、前景、驱动形式、优缺点等,为油电混合动力技术应用于无人机动力系统中提供参考方案。
Abstract: At present, the power of UAV is mainly pure electric motor or pure fuel engine. Pure electric UAV is easy to operate and has high stability, But its endurance mileage is poor. Pure fuel engine can easily solve the endurance problem, But the engine has high requirements for oxygen concentration in the air and poor control response sensitivity, So it is difficult to accurately control and coordinate the pitch and speed of driving rotor, It can not effectively ensure the stable flight, High altitude, high speed and accurate positioning performance of UAV. By analyzing the generation, prospect, driving form, advantages and disadvantages of oil electric drive, this paper provides a reference scheme for the application of oil electric hybrid technology in UAV power system.
關键词: 无人机;油电混合;插电混动;增程式;动力系统
Key words: UAV;oil electric mixing;plug in hybrid;add program;dynamic system
中图分类号:V279+.2 文献标识码:A 文章编号:1674-957X(2021)22-0235-02
1 无人机续航时间
目前制约无人机航时的主要因素是动力系统,一般10公斤左右的无人机理论上自带电池的重量很难超过2.5公斤,这意味着航时不会超过15分钟。在作业任务时受锂电池的能量密度限制,及低温环境影响加快放电,使得航行时间更短。电池技术在未来很长的一段时间内很难有质的突破,使用电池提供动力造成的续航时间不足一时很难解决解决。
燃油的能量密度比锂电池高十余倍,燃油发动机在理论上是要比电池在驱动中有更优的解决方案。但是发动机的油门线性很复杂,调速程序繁琐,造成无人机的响应速度变慢,发动机在最佳输出功率下的转速很窄,需要变速箱改变齿轮配比以适应不同的转速,故会使无人机的设计尺寸增加,重量增加,因此现实油动多旋翼无人机驱动方案技术难度极高。
油动驱动无人机、油电混合驱动无人机、氢燃料电池驱动无人机、太阳能驱动无人机等被许多用户所青睐。从技术难度和工作效率来讲,油电混合技术驱动无人机是目前行业用户最为看好的突破口之一。油电混合技术不仅具备电动无人机的稳定性和易操控性而且还具备油动的可持续性,可以应用到长航时和大载荷的作业任务中。
2 油电混合技术应用于无人机驱动的前景
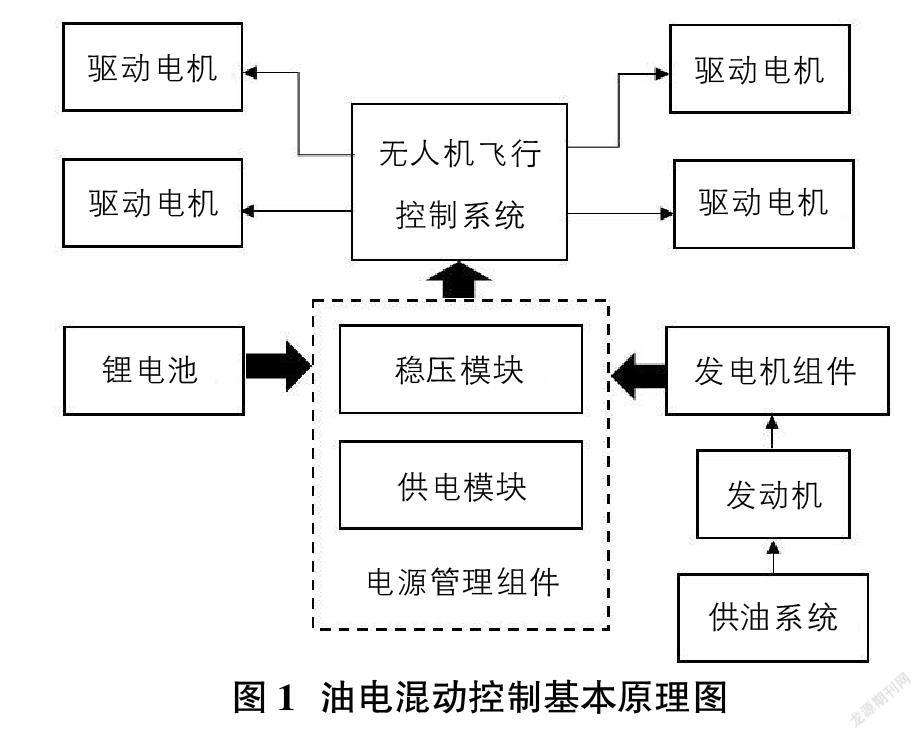
随着无人机技术的发展,其应用领域和频率将逐渐的扩大。对于电动无人机来说由于受限于电池的容量极限其发展空间非常有限,在山地、森林、岛礁等复杂地区高度和距离的影响,单纯的电动驱动已无法满足长航时大载荷飞行。油电混合无人机可以根据需求对油箱进行改装,只要燃油足够就可以有效的解决续航问题。同时配合远距离图传,探测范围可达100公里以上,可以实施大范围、长距离的空中监视、勘查任务。不仅如此,比如在受灾地区没有电力设施的情况下,燃油作为容易获得的能源,避免了复杂环境下充电要求,又节省了宝贵的时间,对减灾救援有极大意义。而且,油电混合无人机能够游刃有余的面对高温、低温、大风、大雨等环境,其生存能力要远大于电动无人机。油电混合无人机在应急抢险、环境监控、边防巡逻等领域可以搭载几款或者多款任务载荷,真正发挥一机多用的功能,如图1所示。
3 油电混动驱动形式
油电混动驱动模式主要是通过对无人机工作电机和发动机的工作进行有效的切换,来确保驱动螺旋桨能够始终保持工作,发动机加载发电机后所发电能既可以给电池进行充电,也可以用来直接驱动电机工作。
插电混动在驱动模式下同样会在无人机驱动电机和发动机之间切换,但是在短航程飞行时,无人机完全可以切换到纯电模式下飞行,发动机完全不参与工作。而发动机在工作时通过传动结部件和控制模块来驱动无人机,只有少数情况下会用来发电。增程式驱动模块在无人机工作时只会使用电池驱动电机进行飞行,发动机的作用完全是在电池电量不足时用来给电机发电,以满足长航飞行需要。
4 不同驱动模块的优缺点
油电混动驱动的优点主要是不需要充电,使用起来和燃油飞机一样方便,油耗却可以做到很低,成本也可以做的比较低。缺点是电池容量有限,长航时没有办法在纯电模式长时间运转,动力性能较差。
插电混动驱动的主要优点是可以通过充电最大程度降低短航时是飞行成本,而在长航时采用燃油发动机飞行,实现一机两用,此控制由于可以实现电动机和发动机一起出力,加速性能也会比较强。缺点是低油耗时电动机和发动机在切换时,很难做到平顺。而短航行时所用电池容量如果增大,将会使整机制造成本升高,起飞重量增大,油耗增大。增程式驱动的主要优点是比插电混动、纯电续航里程更大,在中短途都可以作为纯电动驱动来使用,燃油发动机只用来带动发电机给电动机发电,驾驶感受与纯电动无人机一致,平顺性和航向加速体验都很好。缺点是由于要经过发电和驱动两次能量转换,在高速飞行时,尤为明显情况是电动机的转换效率变低,使得能耗增加。另外,增大驱动电池意味着提升制造成本。
油电混合驱动、插电混动驱动和增程式驱动目前并非自成体系,而是相互借鉴吸收。
5 增程式驱动方案初步设计
通过分析显示,增程式驱动对环境的适应性更强,且具有较高的系统复杂性,适合应用于中大型无人机;相比插电混动驱动而言,增程式驱动在控制上也具有优势,是解决续驶里程、环境适应性等问题的较佳方案。在高寒高海拔地区,由于纯电动无人机存在电池适应性差、动力不足等缺点,增程式驱动在无人机动力系统中应用具有较强的竞争力。同时增程式驱动的无人机驾驶感是最为接近纯电动无人机的,是油电混动最优解决方案,如图2所示。
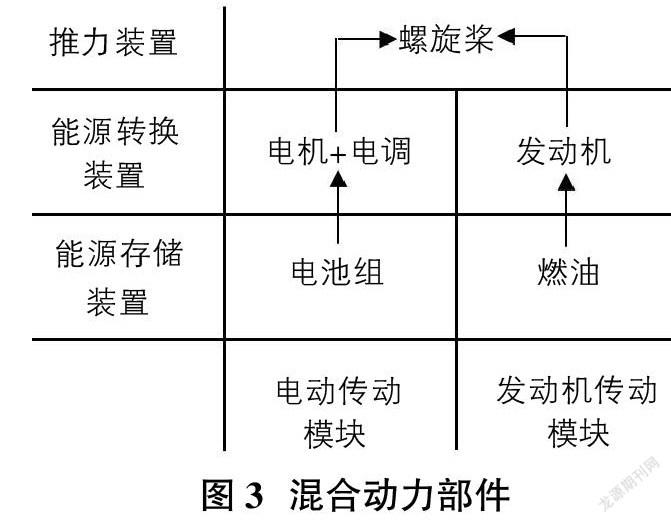
增程油电混合动力关键部件是指由两种以上能源(燃油和电池)提供动力的系统,其关键部件包括发动机、电机、螺旋桨、电池等,如图3所示,这些部件的特性、性能进行分析,是确定满足性能要求的无人机动力装置选型时所需要重点考虑的因素。根据无人机在不同飞行状态下所需的动力需求对无人机动力部件选型为下一步动力布局提供依据。
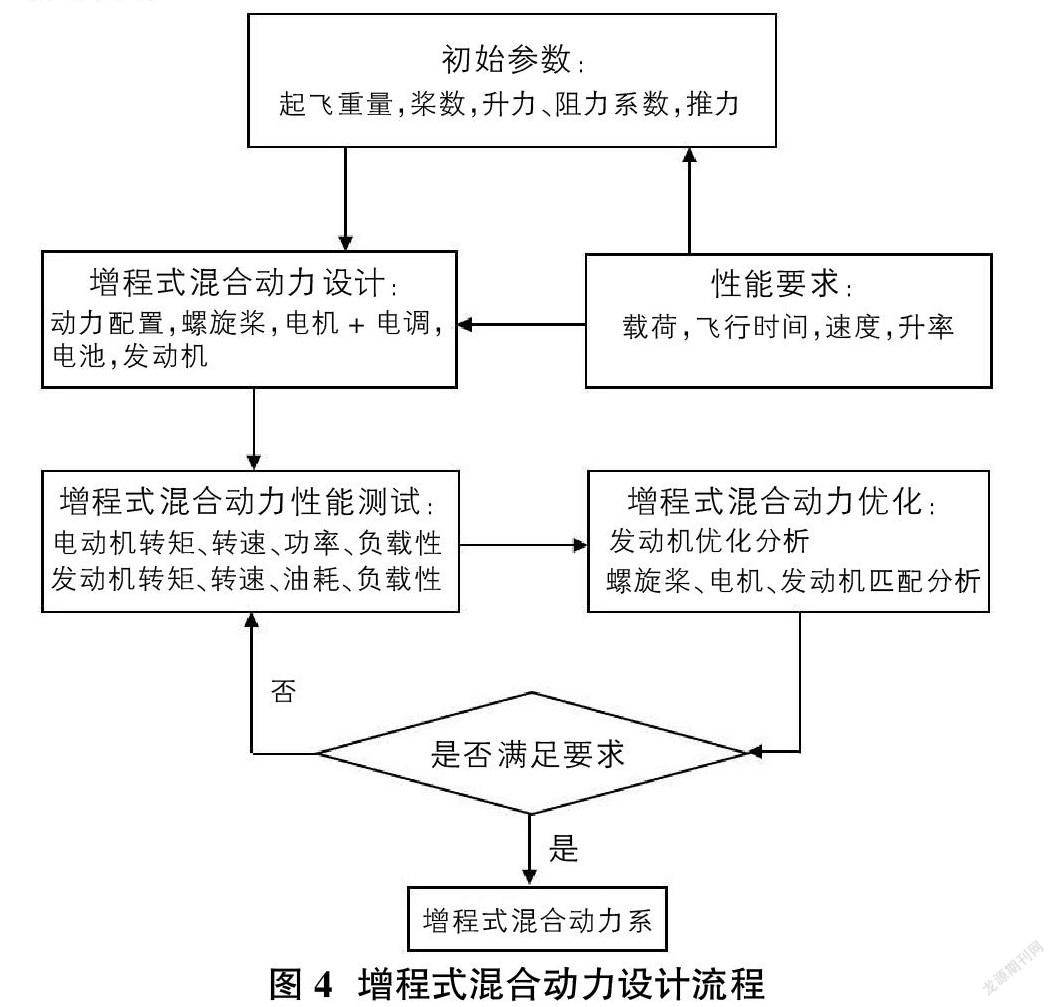
针对无人机增程油电混合动力设计流程如图4所示,动力设计需要从平台特性和主要性能需求出发,不论是动力配置还是动力部件选型都应和平台的结构设计、几何参数、气动特性以及载荷、飞行时间、飞行速度等性能指标关联考虑。
6 结束语
由此可见使用油电混合动力技术后可大幅提升了无人机续航时间,既保留了汽油燃料的高能量密度,同时具备电动无人机的操作灵活、结构简单的特点,可靠性强;适用环境范围广泛,可在零下20度至零上40度的环境下均可正常适用;可以给机载设备带来更为充足的电能;不再需要频繁更换无人机电池,简化了无人机使用步骤,大幅降低了无人机的使用成本和维修成本。
参考文献:
[1]杨健.无人机油箱油量测量的方法研究[J].工业仪表与自动化装置,2020.
[2]吴雨桐.基于油电混合动力系统的多旋翼无人机设计[J].内燃机与配件,2019.
[3]高志強,肖阳.无人机油电混合动力系统的设计实现[J].电子世界,2019.
[4]张梦龙.植保无人机动力系统的改进及试验研究[J].南方农机,2019.
[5]张云琦.油电混合无人机控制技术研究[D].北京理工大学,2016.
猜你喜欢
杂志排行

内燃机与配件的其它文章
- 纯电动汽车坡道起步防溜系统及控制策略的研究 Research on the Anti-Slip System and Anti-Slip Control Strategy of Pure Elect
- 气缸套网格状激光淬火机床设计 Design of Grid Laser Quenching Machine Tool for Cylinder Liner
- Arduino在汽车CAN通讯中的应用研究 Research on the Application of Arduino in Automobile CAN Communication
- 内燃机零部件结构设计及应用研究 Structural Design and Application Study of Internal Combustion Engine Components
- 汽车智能熄灯保护系统的开发 Development of Intelligent Lights-off Protection System for Automobile
- 基于Workbench的炭罐电磁阀流量特性分析与优化 Analysis and Optimization of Canister Purge Valve Flow Characteristics Based on Workbench