基于PLC的模糊控制PID控制器的设计与应用
2021-11-09林洽怀
林洽怀
(广东省能源集团有限公司沙角C电厂,广东 东莞 523969)
传统的比例-积分-微分(PID)控制器在工程控制中有着广泛的应用,但是对于一些特殊的控制对象,或者使用者对控制响应特性有高要求时,传统的PID控制器有明显的局限性。本文介绍一种模糊自整定参数的FUZZY-PID控制器。该控制器通过模糊控制原则对PID进行动态调整,使得PID 3个参数能够符合不同响应阶段的需求,从而实现对控制效果的提高和改善。以沙角C电厂脱硫废水项目中高效反应器的pH值调节为例,验证了该控制器的高效性。
沙角C电厂的脱硫废水系统一级高效反应器中,pH值需要控制在11,以确保去除掉废水中的金属离子,使反应高效进行,也使得出水满足排放的标准。同时,pH值的调节存在很多难点:
1)由于反应器容量巨大、变送器会引入延迟时间,所以pH值调节存在一阶惯性和纯滞后性;
2)pH值作为H+离子浓度的负对数值,本身具有强非线性,pH值变化有两端变化缓慢、中间变化迅速的特点。
3)pH值受温度影响,温度的变化会使H+、OH-的溶解度增大或减小,从而改变中和点。
由此可见,pH值的调节对控制器的高效性与稳定性有着较高的要求。
1 基于FUZZY-PID控制的pH值调节算法
模糊控制系统是一种以模糊语言变量、模糊集合化和模糊规则推理为基础的非线性智能控制系统[1]。日常生活中,人类总是能根据外部的变化来做出不同的动作。例如开车的时候,车速快了,我们就会减小油门,反之则加大油门。模糊控制反映了类似的决策思路,有一定仿生的特点。模糊控制的核心是对经验的有效总结,并转化为相应的控制规则[2]。由于模糊控制具有较强的鲁棒性,而且设计简单,因而被广泛应用于工业界。
本文介绍的FUZZY-PID控制器由两部分组成:PID控制器和模糊推理参数整定部分。传统PID控制器由比例环节、积分环节、微分环节3部分组成。传递函数为
(1)
式中:Kp为比例增益;Ti为积分时间;Td是微分时间。
PID系数的增大与减小在系统响应过程的不同环节会有不一样的影响[3]。较大的比例系数能加快系统响应,但也会使得系统稳定性变差,增大超调量。积分环节能减少超调、震荡,消灭稳态误差,但是会使得稳定时间变慢。如果对系统动态特性要求相对较高时, 则常规的线性PID调节器就很难达到设计要求。这时, 就不得不考虑用增益参数的非线性变化特性来解决这一问题。在pH值中和的过程中,需要对比例、积分、微分系数进行动态的调整,以达到更理想的效果。这就需要引入模糊控制器(见图1)。

图1 模糊控制器
模糊控制器的工作原理如图1所示,这里的FUZZY模糊控制器为二维模糊控制器,输入量有pH值偏差e,和变化率Δe,输出量有3个,分别对应ΔKP、ΔKi、ΔKd值。模糊控制器根据系统的输入误差e以及误差变化率Δe,经过模糊化处理,分析出当前系统响应的阶段,从而进行对应的决策。相关模糊化设置见表1。其中,输入输出的隶属函数曲线如图2所示。

表1 模糊设置

图2 隶属函数曲线
FUZZY-PID 控制器的控制决策思路:当偏差|E|较大时,应取较大的,使得响应加快,Ki应取小值来防止出现超调和积分饱和现象;随着|E|的逐步减小,Ki应逐步加大,但此时仍会产生超调和震荡,所以Ki、KP仍要取小值;当|E|较小且逐渐接近0时,Ki、KP应取较大值以保证响应速率和系统稳态特性。根据FUZZY-PID 控制器的控制决策思路,建立输出整定修正值查询表,如表2所示。

表2 模糊控制规则
依据模糊决策规则表,由输入量可以求出输出量的隶属度,采用最大隶属度法进行反模糊化,从而推出输出量的取值:ΔKP、ΔKi、ΔKd。调整值乘以对应的比例因子k1、k2、k3,乘积分别与KP0、Ki0、Kd03个控制参数的初始值相加,得到新的KP、Ki、Kd值。
2 仿真实验
根据文献[4-5]的仿真方法,利用MATLAB软件,进行pH值控制模型仿真。首先利用编辑器指令申明模糊控制器对象FIS,并依据上文,分别用“addMf”函数设置FIS对象的2个输入量、3个输出量的论域,模糊子集。根据上文的变量查询表建立对应的输出法则。点击运行编辑器,可以在工作区看见生成的FIS对象和相应的对应法则。
利用Simulink工具箱建立仿真程序如图3所示。
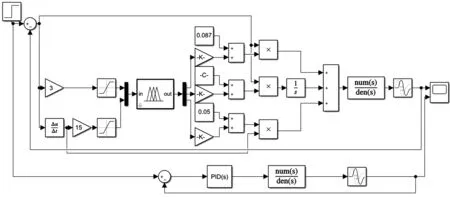
图3 仿真程序
仿真实验一的传递函数为
(2)
延迟τ= 15 s,KP0=0.087,Ki0=0.013 1,Kd0=0.05。调整FIS模块输入量的系数,使得输入量在论域内,且能发挥模糊子集的等级分辨率。同时,调整输出量的系数因子,使得对PID系数的调整幅度适当。这里的仿真程序要注意系统输入偏差的微分环节不应在模糊控制器后取值,否则会引入模糊控制器输出值变化的影响,影响系统的稳定性。运行仿真程序,仿真效果如图4所示。
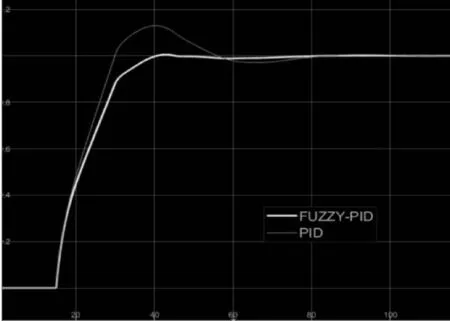
图4 仿真实验一响应曲线
仿真实验二参考文献[6]中的仿真模型为
(3)
延迟τ=4 s,KP0=0.2,Ki0=0.161,Kd0=1.2。调整其他系数,使得FIS的输入输出适当。待系统稳定后,模拟加入中和液,仿真效果如图5所示。
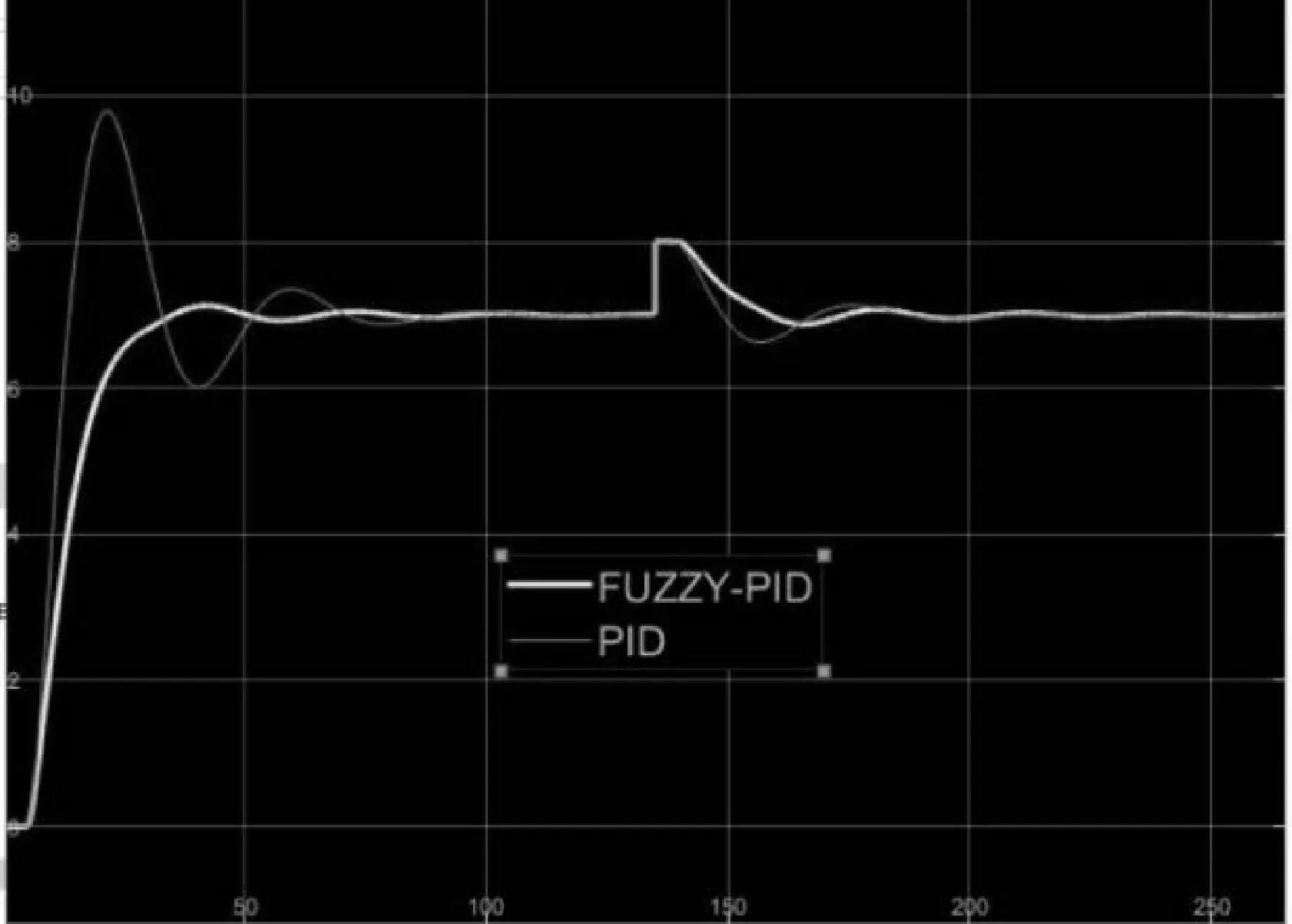
图5 仿真实验二响应曲线
由以上实验结果可以看出,FUZZY-PID控制器相比纯PID控制器(见表3)具有超调量小、震荡少、调节时间更短等特点,稳态效果更好,而且对不同的模型都有很好的适应性和鲁棒性,从而验证了该算法的可行性,可以被应用到脱硫废水的控制系统中。

表3 FUZZY-PID与传统PID性能对比
3 FUZZY-PID算法的PLC实现
在完成FUZZY-PID控制器的理论和仿真研究的基础上,将该算法移植到可编程控制器(PLC)上进行实验研究。采用的编程环境为罗克韦尔公司的RSLogix 500软件。
系统程序如图6所示,通过在PLC程序中建立二维查表程序来实现模糊控制方法的简单方便,适用于PLC函数库少、算力较弱而实时性要求高的控制系统,能高效便捷地实现“离线计算,在线查询”功能。
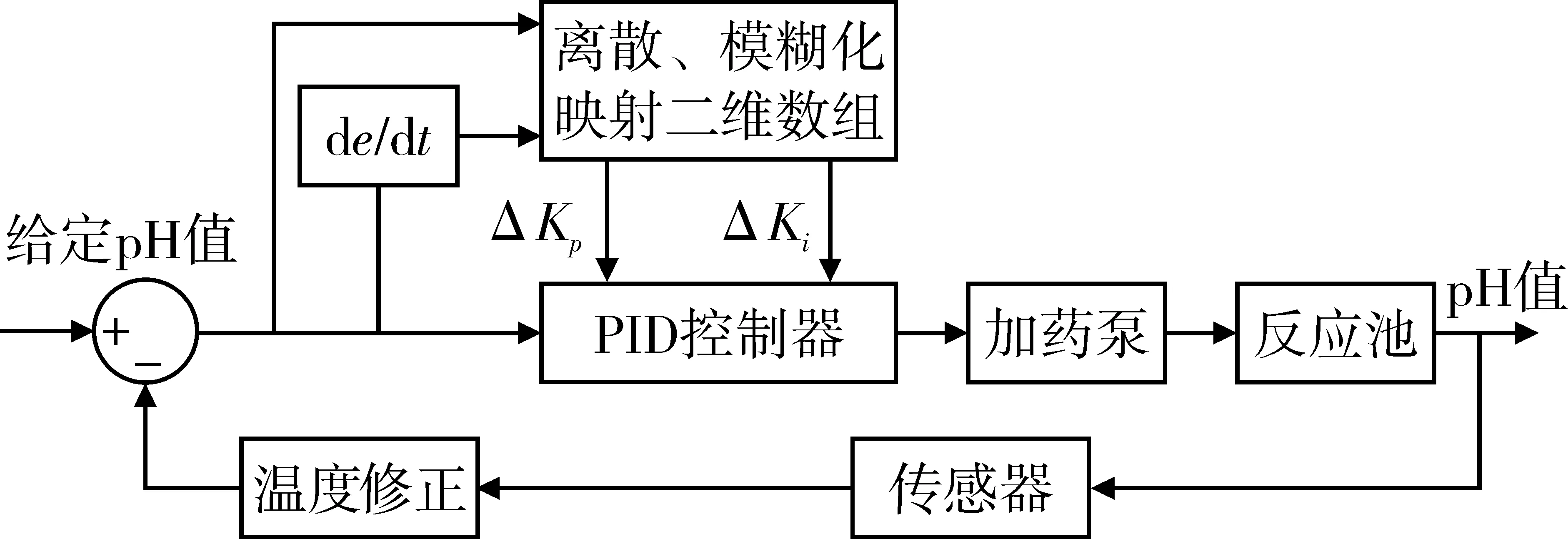
图6 PLC控制系统图
系统运行时先将比例因子设为零,即取消模糊器的作用,采用纯PID调节。采用传统的Ziegler-Nichols规则、基于4:1衰减率的工程法则对进行工程Kp、Ki初始整定。取得Kp=30、Ki=10。一级高效反应器正常工作的pH值范围为10~12,设pH值11为零点,则变化范围为[-1,1]。实测满负荷情况下,pH值变化率的变化范围为[-0.05,0.05]。调整比例因子k1、k2使得变化调整幅度适中。
从图7中可以看出系统开启后碱液计量泵快速响应,以较高的频率运行,使得pH值到达设定值,并使得超调较小。之后在流量、液位等因素的干扰下,pH值仍能保持稳定,直至当天下午系统停止运行。

图7 运行趋势图
4 总结
该方案自投运以来,运行良好,能克服不同扰动的影响,使pH值稳定在设定值周围,且调节动作平稳、迅速、准确,变频泵动作平稳,既能保护设备不受损,也能确保系统高效、稳定。FUZZY-PID控制器经过实际的工业应用,证明其具有良好的调节性能,这给其他同类型的pH值控制器提供了理论和实际的参考依据。
