一种三自由度车载无人机升降调平装置研究
2021-10-26张延芝
张延芝
(江苏无线电厂有限公司,江苏 南京 210022)
0 引言
无人机可完成情报侦察、中继通信、电子对抗、防空、制空、精确打击等多种任务,其通常搭载于各种车辆的运动平台上执行飞行任务。在2014年2月新德里汽车展上,雷诺发布的一款KWID概念车提出了车载无人机的应用,其车顶配备了四旋翼无人机。2017年路虎推出一款SUV车交付奥地利红十字会,其车顶搭载一架小型四旋翼无人机,用于紧急情况下的搜寻和救援任务[1]。
随着汽车科技和无人机技术的发展,车载无人机作为空地互补一体化作战模式,打造了交互融合的作战新体系,有效提升了系统协同作战能力。在车载无人机系统模式下,战车摇身一变成为小型“陆地航母”,无人机在车辆运动平台上的成功起降及随行储运,成为车载无人机系统性能的重要技术指标之一。但车载无人机起降的水平度一般≤10°,在车辆可通过的大坡度山地、越野地等地形中,较难安全可靠地起降无人机。
一般车载无人机系统集成常见的是小型车辆配置较小起飞载荷、非系留式小型无人机。为满足在大型越野车上集成整机起飞质量≥70kg的多旋翼系留无人机的使用需求,研究并设计了一种基于三自由度的车载无人机升降调平装置,可用于大型越野车重载无人机系统集成中,在车辆任意方位大角度倾斜静止或运动中,可进行无人机起降平台的大行程升降与全向调平,保障了无人机的储运与起降。
三自由度平台广泛应用于科研实验室高精度运动平台搭建、姿态控制、运动模拟与仿真等,以及舰船与汽车模拟器、3D/4D娱乐平台、VR娱乐座椅等方面[2]。在升降调平装置的设计中引用三自由度平台的运动机理[3],对其常规应用逆向扩展,将其中的上下、俯仰、横滚等3个自由度运动组合使用,使底座倾斜时,控制平台恒定水平调平,从而可集成应用于车载无人机系统的升降调平装置中[4]。
1 总体结构方案
升降调平装置总体结构主要由三自由度调平平台和丝杆滑块升降机构组成,其总体结构方案见图1。

图1 总体结构方案
三自由度调平平台又为车载无人机的起降平台,其主要由3组折返式伺服电动缸、顶部单轴铰链和底部双轴虎克铰以及顶部平台组成,安装基座共用升降平台。三自由度调平平台具有俯仰、横滚和微行程升降运动等3个自由度,通过联动控制3个伺服电动缸,调节平台水平方向360°的姿态,其全向调平倾斜角度可达22°,使车辆在任意方位40%坡度内的山地、越野地等地形上,也能调平无人机起降平台[5]。
丝杆滑块升降机构作为三自由度调平平台稳固可靠的升降基座,其主要由两组丝杆滑块升降组件、一套驱动传动组件和升降平台组成。通过单输入双输出减速机驱动两侧梯形丝杆滑块升降组件,进行升降平台的垂向运动。其能在任意位置停滞并滞留自锁升降平台,且易于增配模块化手动装置,用于应急手动升降。同时,解决了在三自由度调平平台[6]的结构尺寸及稳定性要求的限制下,垂直升降行程较小的问题。
升降调平装置的三维结构设计见图2。
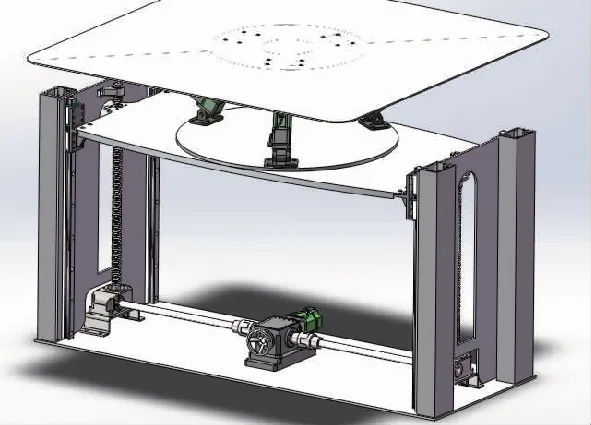
图2 三维结构设计
升降调平装置结构方案的主要性能指标及技术参数见表1。
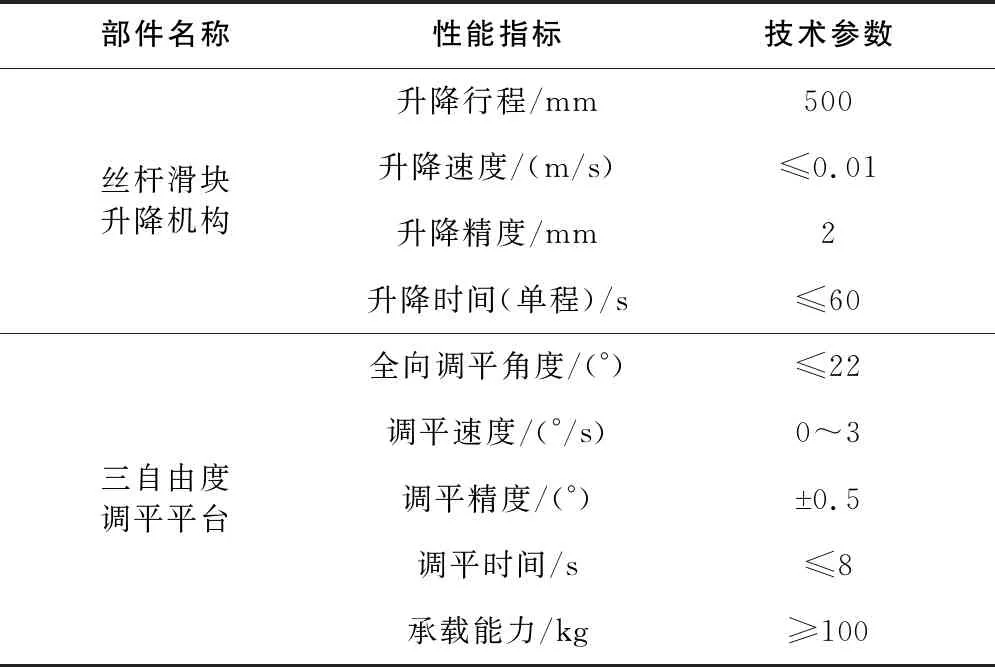
表1 运动性能指标
2 电气系统原理
升降调平装置电气系统主要由全向调平控制单元、升降运动控制单元、检测组件和运动控制模块等组成,其电气系统原理见图3。

图3 电气系统原理
全向调平控制单元根据倾角传感器采集调平平台当前水平方向x轴、y轴的倾角值,通过解算后控制3个伺服电动缸的位移量,使调平平台处于水平状态。对倾角传感器的倾角采集频率与电动缸的运动响应频率进行耦合匹配,实现平台的实时动态调平。
升降运动控制单元根据位移传感器采集的当前升降平台高度位置信息,按上位机任务指令控制驱动传动组件的伺服电机,完成升降平台的上升、下降或置零动作。
检测组件作为升降平台的极限位置电气限位,当位移传感器出现故障时,上、下两个限位开关控制升降平台停止。
运动控制模块作为升降调平装置的主控制器,具有三自由度调平平台姿态控制、升降平台位置控制、工作流程控制、数据采集与处理、CAN通信、任务处理与故障报警等功能。
3 控制系统架构
控制系统主要由检测组件和运动控制模块两部分组成,其控制系统架构见图4。
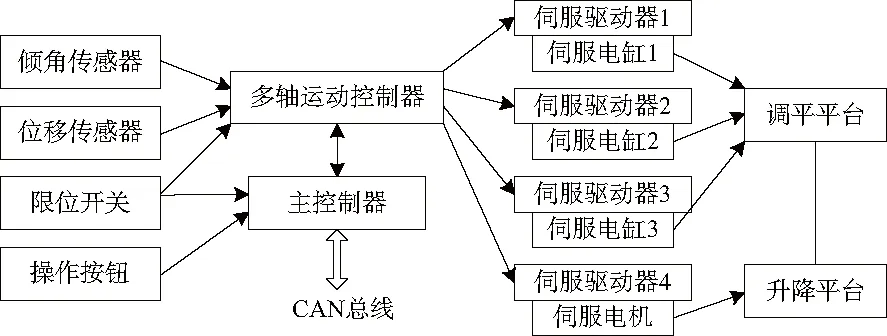
图4 控制系统架构
检测组件由测量调平平台姿态角的倾角传感器、测量升降平台位置的位移传感器及限位开关等组成。倾角检测采用三轴加速度计和MEMS陀螺仪组合的动态倾角测量传感器[7],可实时测量水平双轴x、y方向的倾角,以闭环动态控制平台至恒定水平姿态。位移传感器采用拉绳式绝对值编码器,控制升降平台的上下位置,具备断电位置记忆,可手动和电动自由切换使用功能。限位开关由上下两个接近开关组成,用于上、下极限位置电气安全保护。
运动控制模块由STM32系列主控制器、多轴运动控制器、伺服电机及其驱动器、嵌入式操作系统、嵌入式运动平台控制软件和CTM8251系列CAN通信模块等组成。
4 软件系统设计
控制软件采用嵌入式系统软件,包含硬件初始化程序、操作系统板级支持程序、升降调平控制软件应用程序、底层驱动程序及外围扩展模块,具备二次开发功能,并能够配合整车无人机起降与储运系统集成。
控制软件主要完成的功能包括BIT自检、状态机模型、任务控制、动作控制、运动控制、数据采集与状态监控、CAN通信控制、故障报警等多个任务,并按任务优先级进行实时调度控制。
平台控制策略流程见图5,其中BIT自检可对本系统硬件和软件的功能和性能进行自动检测,并在发现故障时自动隔离故障并发出预警信息。任务控制是通过时序和逻辑控制方式完成一整套完整的动作流程,如能一键调平上升至最高点,一键复位并下降至最低点。动作控制用于规划三自由度调平平台和升降平台的运动轨迹和控制目标。运动控制则根据三自由度调平平台的逆运动学模型[8],针对目标承载平台的期望位姿,反解出多个伺服电动缸的期望位置和速度,并通过多轴运动控制器完成多个伺服电动缸的实时协同控制。状态监控用于采集调平平台的实时姿态以及升降平台的实时位置,并记录调平与升降的次数。通信控制用于通过CAN总线接口提供调平组件角度信息、升降组件高度信息、状态信息、故障信息等[9]。
软件系统的状态机[10]模型见图6,用于平台上电并初始化后,对当前任意时刻、任意位姿的调平平台状态进行转移与处理。因运动平台在运行过程中存在多种状态,包括:上电状态、底位状态、中位状态、调平状态、急停状态等,利用状态机模型分析,对调平平台状态进行模块化管理,可更好地完成调平平台运动控制及安全操作。
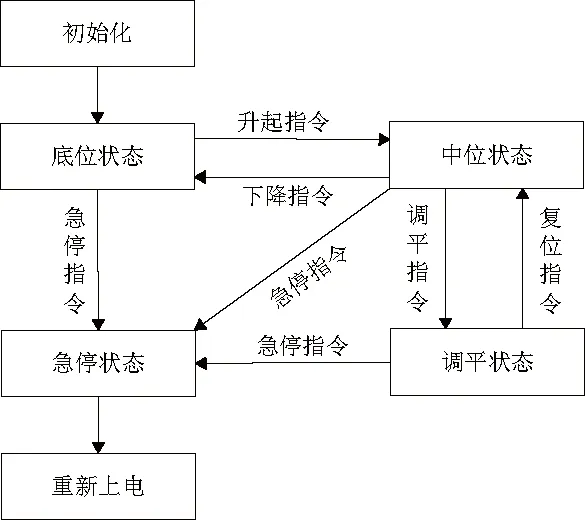
图6 状态机模型
5 结语
本文研究并设计的三自由度升降调平平台可用作车载无人机的升降调平装置,可在车辆任意方位22°倾斜角内,静态或动态升降、调平平台,保障车载无人机任意时态的安全起降。同时拓展了三自由度运动平台的应用场合,也为实现车载无人机的起降提供了结构方案与系统原理基础。