机器人RV减速器输入端的有限元分析
2021-10-26张更强李敬波李佳峻雷有巧王鑫
张更强,李敬波,李佳峻,雷有巧,王鑫
(1. 宝鸡文理学院 a. 机械工程学院,b. 陕西省机器人关键零部件先进制造与评估省市共建重点实验室,陕西 宝鸡 721016; 2. 中国石油宝鸡石油钢管有限责任公司,陕西 宝鸡 721008)
0 引言
高精度RV减速器是工业机器人的核心部件,在传动过程中零部件的受力变化会直接影响减速器的传动精度。对其核心零部件进行受力分析可以更好地了解其在工作状态下的力学特性,为减速器的优化设计、精度提高提供理论依据。
近几年国内专家学者将研究方向集中在动力学仿真与受力分析等基础特性方面,深入挖掘RV减速器的基本规律,为国内生产企业提高产品性能提供理论指导。现有的研究中分别从模态分析[1-4]、齿根强度及接触[5-7]、ANSYS[8]、ADAMS虚拟样机[9-12]、传动误差[13]等方面进行了研究。例如,何卫东等[1]对减速器进行理论与实际的对比分析,发现整机的固有频率实验值与理论值存在较大分散度的原因主要是由零部件的制造、装配误差造成的。刘强等[7]使用有限元分析软件ANSYS Workbench对RV减速器进行了应力、应变分析,得到输入齿轮和正齿轮有限元多齿接触的应力、应变的大小和分布,同时提出了改变过渡圆半径的方法。徐宏海等[9]利用ADAMS仿真对比了RV减速器特征频率的理论值与仿真值。
本文针对机器人RV-40E型减速器的输入轴及摆线轮进行静力学及模态分析,该研究可以为RV减速器的优化设计提供理论指导。
1 RV减速器的传动原理及参数设定
1.1 RV减速器的传动原理
RV减速器是当前工业机器人使用最多的传动装置之一,具有传动比大,精度高,传动范围小等优点。本文以RV-40E型减速器为研究对象,其结构如图1所示。减速器由行星轮、行星架、曲柄轴、摆线轮、滚柱轴承、针齿、保持架、针齿壳、输入轴等部件构成。本文将针对受力较为复杂的行星轮及摆线轮进行有限元分析。

图1 RV减速器的结构图
1.2 有限元分析的参数设定
采用UG软件完成机器人RV-40E型减速器的建模及分析等过程。定义目标材料为20CrMo,密度为7.9g/cm3,泊松比为0.3,弹性模量为206GPa,切变模量为79.23GPa。齿轮材料选择为各向同性,连续且分布均匀,忽略齿轮啮合时存在的摩擦力。
约束和边界条件的设置:输入轴只保留轴向的转动,限制输入轴水平、垂直方向的转动和移动及轴向的移动,对输入轴选用销钉约束。行星轮与输入轴齿轮啮合,行星轮中间的内花键齿轮与减速器的曲柄轴相啮合,因此对行星轮中间与曲柄轴的接触部分施加固定约束如图2所示。齿轮之间相互啮合,其选择的面对面接触单元长度默认为0.2mm。

图2 输入轴与行星轮的约束
对于摆线轮,由于其受到针齿构件和曲柄轴的共同作用发生旋转,其中心部位受输入轴的限制,所以在中心孔处施加固定约束,在曲柄轴孔处施加转矩5457N·mm,如图3所示。进行模态分析时,由于其与减速器的多个部件配合,只在轴向发生转动,因此在中心孔处施加一个销钉约束。

图3 摆线轮约束与载荷的施加
载荷的施加:输入轴末端连接驱动部件,在该处施加转矩。对于RV-40E型减速器,其额定功率为5kW,许用转矩为40000N·m,输出转速范围为75r/min,选择3组均在许用载荷范围内的载荷,进行对照求解,以验证求解的合理性,避免特殊的因素导致分析的误差。
根据给定输入功率P和输出转速n输出,由公式n输入=i·n输出,转矩T=9550P/n输入,求得相应转矩,取传动比i=105,3组负载计算的结果如表1所示。
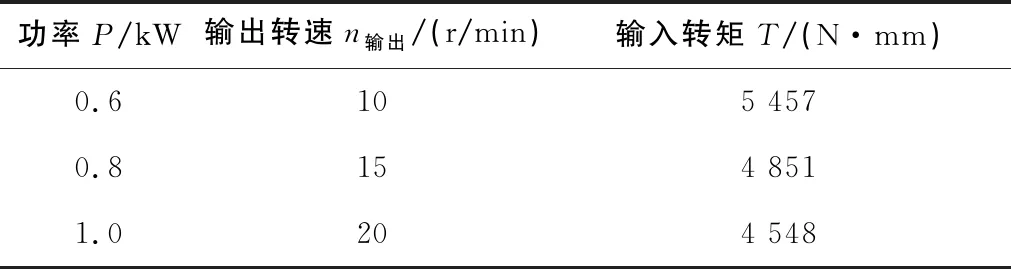
表1 不同负载下的输入转矩
2 输入端的有限元分析
在UG中,分别求解3个转矩下输入轴和行星轮模型的应力、应变、位移云图,如图4-图6所示。由于图中数据不易看清,在此列出不同负载下的应力、应变、位移结果的最大值见表2。
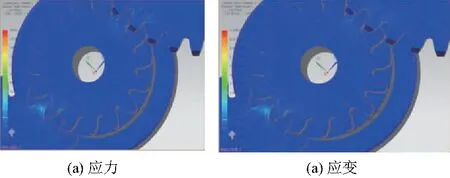
图4 输入轴上施加转矩5457N·mm时的云图

图5 输入轴上施加转矩4851N·mm的云图

图6 输入轴上施加转矩4548N·mm的云图
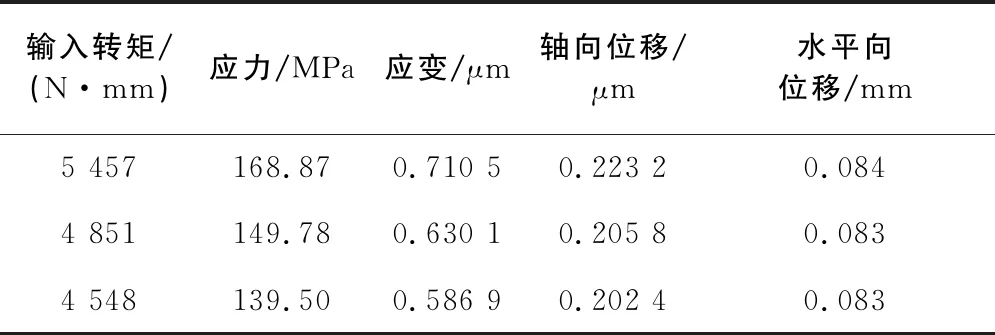
表2 不同转矩下应力、应变、位移最大值
从各转矩下的Von Mises应力云图中可以看出,最大应力依次为168.87MPa、149.78MPa、139.50MPa,随转矩减小而递减。最大应力位于输入轴的齿轮与行星轮齿轮啮合部分的中部,从金属材料手册中材料的各种属性可知20CrMo的屈服极限为685MPa,由表2可知最大应力为168.87MPa,远小于20CrMo的屈服极限685MPa。所以该系统满足应力要求,齿轮的应力分布满足强度要求。应变的位置与应力位置一致。
位移方面,轴向最大位移发生位置与应力相一致,水平与垂直方向位移值较大,由于垂直方向位移最大值保持0.083mm不变,与水平位移几乎一致,在此没有列出。
3 摆线轮的静力学分析与模态分析
3.1 摆线轮的静力学分析
在UG的高级仿真功能里面,在摆线轮的中心孔处施加固定约束,在曲柄轴孔处施加转矩5 457N·mm,对摆线轮模型进行静力学求解分析,得到该转矩下的应力、应变、位移图,如图7所示。

图7 摆线轮云图
摆线轮的最大应力、应变集中在中心孔和曲柄轴孔处,摆线轮与针齿接触,也会受到应力作用,因此在外围针齿齿根处同样出现均匀的应力集中。最大位移发生在摆线轮的边缘,随摆线轮旋转最大位移发生位置移动,但呈上下对称状。
3.2 摆线轮的模态分析
对摆线轮进行模态求解,设定解算类型为SOL实特征值,在工况控制中的Lanczos数据中编辑所需要的模态数,选择为6,约束施加后进行求解运算,得到摆线轮各阶模态变化振型图,如图8所示。整理数据,见表3。
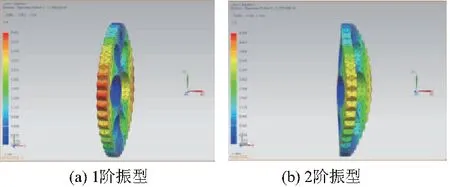
图8 摆线轮振型

表3 摆线轮各阶固有频率及振型
图8中,由各阶振型摆线轮各部分的颜色可以看出,摆线轮的中间部分受力远小于摆线轮边缘部分的受力,说明摆线轮边缘部分在循环载荷下发生疲劳破坏的可能性更高(本刊为黑白印刷,相关疑问请咨询作者)。
4 结语
1)输入端应力、应变值都随载荷的增加而增加,最大应力位于输入轴的齿轮与行星轮齿轮啮合部分的中部,最大应力值为168.87MPa,远小于模型所选定材料的屈服极限685MPa,齿轮的应力分布满足强度要求。
2)摆线轮的最大应力、应变集中在中心孔和曲柄轴孔处,在外围针齿齿根处同样出现均匀的应力集中。最大位移发生在摆线轮的边缘,随摆线轮旋转最大位移发生位置移动,但呈上下对称状。
3)由摆线轮各阶振型可以看出,摆线轮的中间部分受力远小于摆线轮边缘部分的受力,说明摆线轮边缘部分在循环载荷下发生疲劳破坏的可能性更高。