五自由度冗余机械臂运动学分析
2021-09-10谷雷黄福洋
谷雷 黄福洋


摘要:为了完成对核聚变试验装置的日常维护工作,通过遥操作机械臂对核聚变实验堆装置进行包层维护是核聚变实验遥操作维护系统的重要任务之一。包层遥操作维护机械臂工作空间狭小,需对机械臂进行特殊设计。设计五自由度冗余机械臂方案,并进行动力学分析和Matlab仿真分析。
关键词:核聚变装置;机械臂;运动学分析;D-H法;Matlab
中图分类号:TP242 文献标识码:A 文章编号:1674-957X(2021)12-0073-04
0 引言
煤炭、石油等传统能源的使用带来巨大的污染,对人们的生產、生活造成巨大影响,因此清洁能源的利用显得尤为重要。核聚变反应是一种理想的获得清洁能源的途径[1],托卡马克是核聚变商用的重要装置。由于对装置的维护工作需在一定的辐射环境下进行,因此采用遥操作机械臂执行相关维护工作是最重要的实现方案[2],已验证其可行性,如在国际热核聚变实验堆ITER包层维护采用遥操作机械臂顺利完成任务[3]。我国的核聚变项目CFETR中包层的转运任务由遥操作机械臂完成,由于聚变堆内部空间狭小,包层底部锁紧轴销维护机械臂的设计难度增大,结构要求特殊。设计可折叠的五自由度冗余机械臂,可在狭小空间内工作,且避障能力较好,故能够在复杂的聚变装置内执行维护工作[4]。可广泛应用于工作空间狭小、复杂的工作环境,解决人工无法完成的工作,具有一定的避障能力。在汽车生产领域,可取代人工安装螺栓、钻孔等工作,提高工作效率、工作质量;冶炼过程中,代替工人抓取铸造钢坯,避免工人受伤,提高效率;大型锻造过程中,代替人工完成锻造件的转运,保障工人的人身安全,降低风险。
本文选择五自由度冗余机械臂作为研究对象,通过改进型D-H参数法对机械臂进行运动学分析、求解,并通过MATLAB进行仿真分析,为后续机械臂研究提供参考。
1 机械臂结构参数
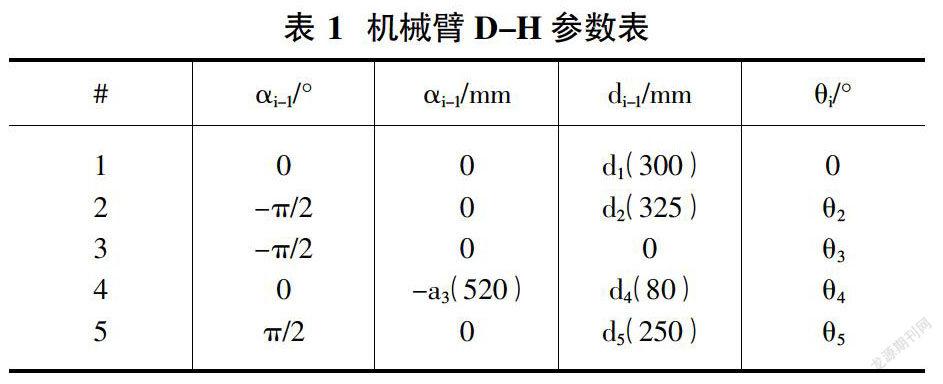
通过关节坐标结构,机械臂设计为五自由度冗余机械臂,包括四个转动自由度和一个底部移动自由度[5],最大负载20kg,最大工作半径770+300mm。通过改进型D-H参数法和各关节间的相互关系,建立五自由度冗余机械臂的运动学模型,5个关节建立包括参考坐标系在内的6个坐标系,推导齐次变换矩阵,计算出相关位姿参数,得到各关节坐标系间的位置和姿态[6-8],从而获得机械臂位姿和运动的状态。根据改进型D-H参数法建立机械臂坐标系,如图1所示,机械臂D-H参数如表1所示。
其中?琢i-1表示绕Xi-1轴旋转使Zi-1轴Zi与轴平行的角度;ai表示沿Xi-1轴方向移动,使得Zi-1轴与Zi轴共面的距离;di表示沿Zi轴方向移动,使得Xi-1轴和Xi轴重合的距离;?兹i表示绕Zi轴旋转使Xi-1轴和Xi轴平行的角度。
2 机械臂运动学正解
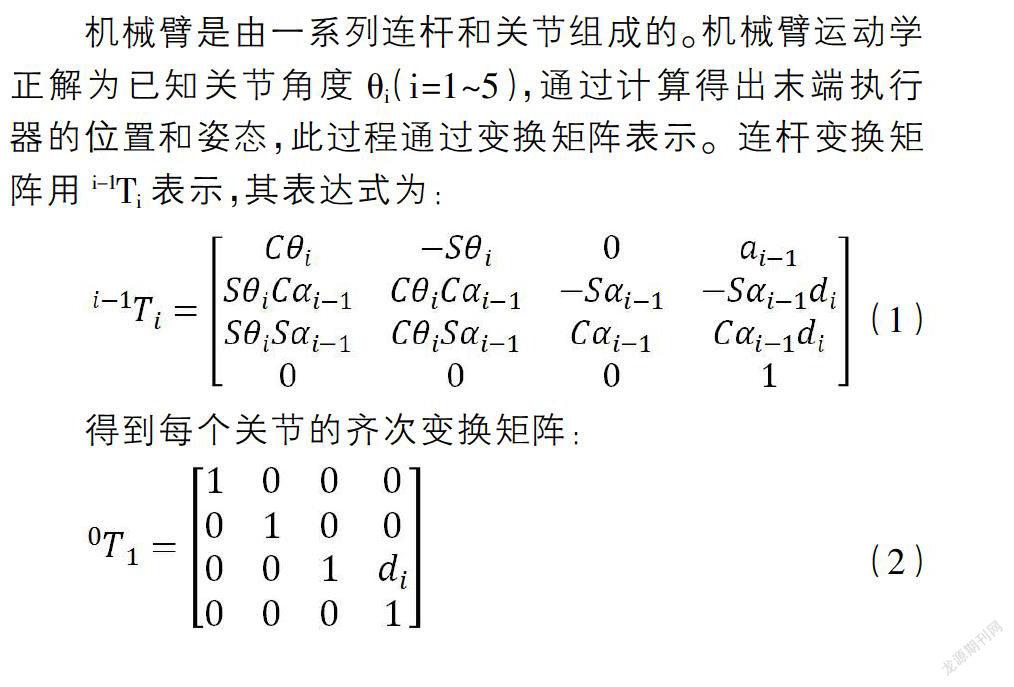
机械臂是由一系列连杆和关节组成的。机械臂运动学正解为已知关节角度?兹i(i=1~5),通过计算得出末端执行器的位置和姿态,此过程通过变换矩阵表示。连杆变换矩阵用i-1Ti表示,其表达式为:
3 机械臂运动学逆解
逆运动学求解为求解正运动学的逆过程,求解思路为给定机械臂末端执行器一个期望位姿,通过解析法计算得出各个关节的运动参数。
当0T5已知,根据上述公式(2)~公式(7)得?兹i(i=1~5)。
①求解?兹2的值。
这里的四象限反正切函数Atan2(sin,cos)[9]是机器人中常用的函数,可有效避免计算出错。如式(12)中?兹2采用Atan2(sin,cos)函数的输入参数为角度的值sin和cos值,可以准确的定位到某一确切象限。
4 MATLAB仿真分析
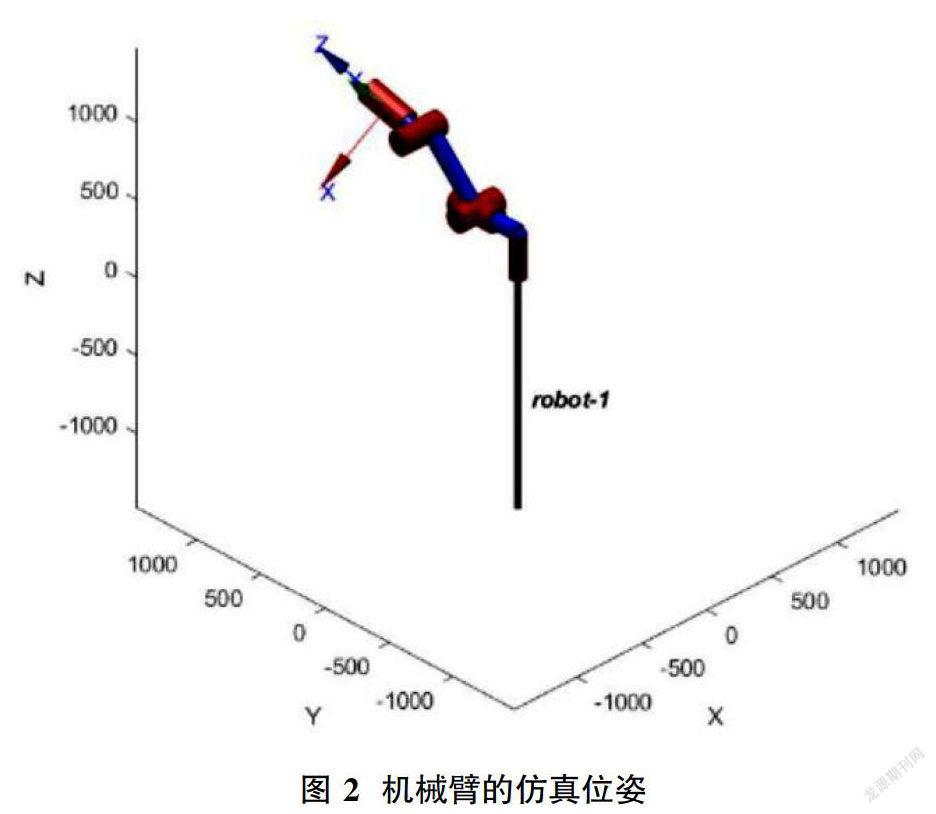
4.1 验证正运动学
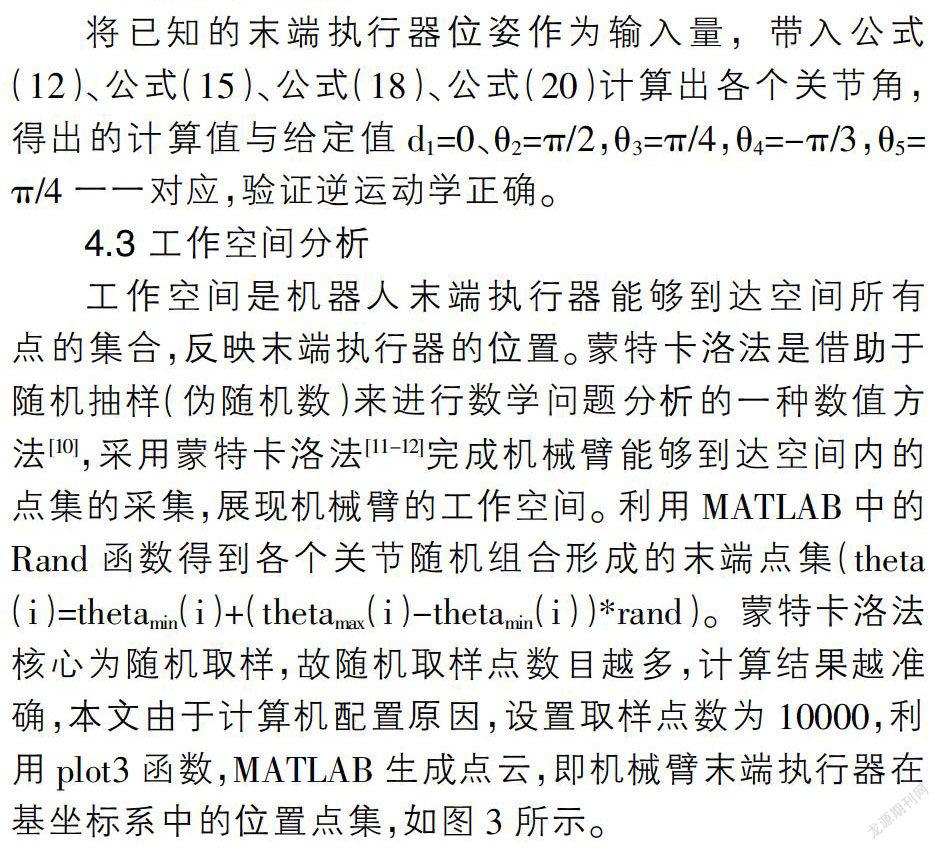
4.3 工作空间分析
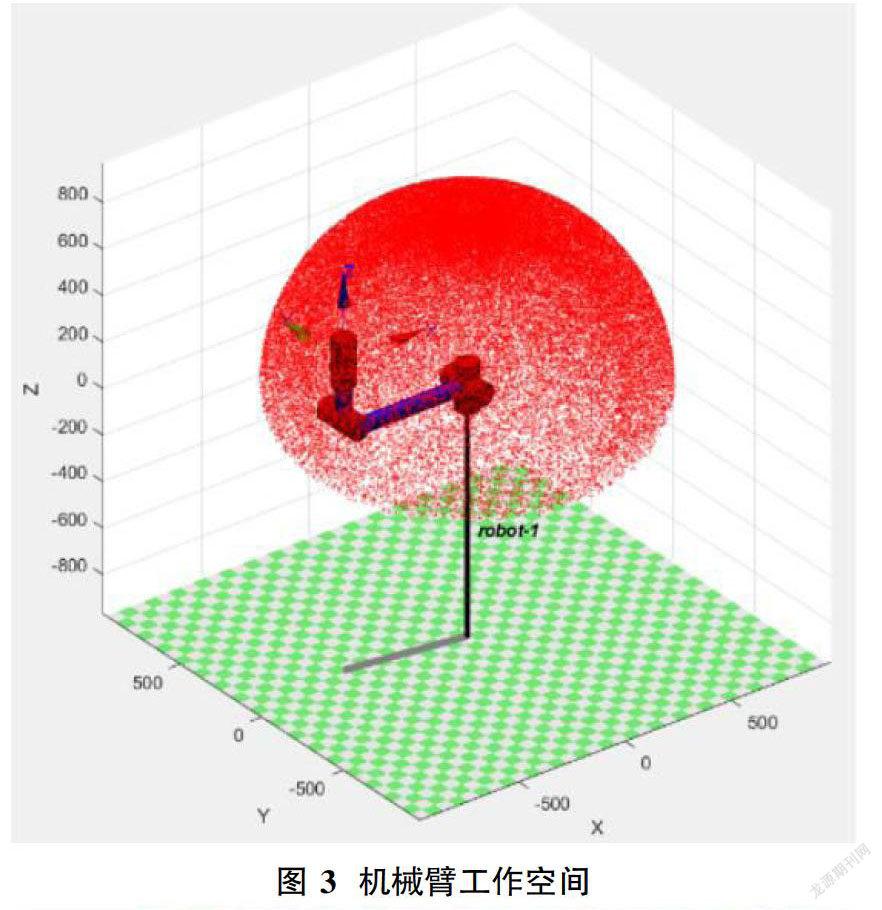
工作空间是机器人末端执行器能够到达空间所有点的集合,反映末端执行器的位置。蒙特卡洛法是借助于随机抽样(伪随机数)来进行数学问题分析的一种数值方法[10],采用蒙特卡洛法[11-12]完成机械臂能够到达空间内的点集的采集,展现机械臂的工作空间。利用MATLAB中的Rand函数得到各个关节随机组合形成的末端点集(theta(i)=thetamin(i)+(thetamax(i)-thetamin(i))*rand)。蒙特卡洛法核心为随机取样,故随机取样点数目越多,计算结果越准确,本文由于计算机配置原因,设置取样点数为10000,利用plot3函数,MATLAB生成点云,即机械臂末端执行器在基坐标系中的位置点集,如图3所示。
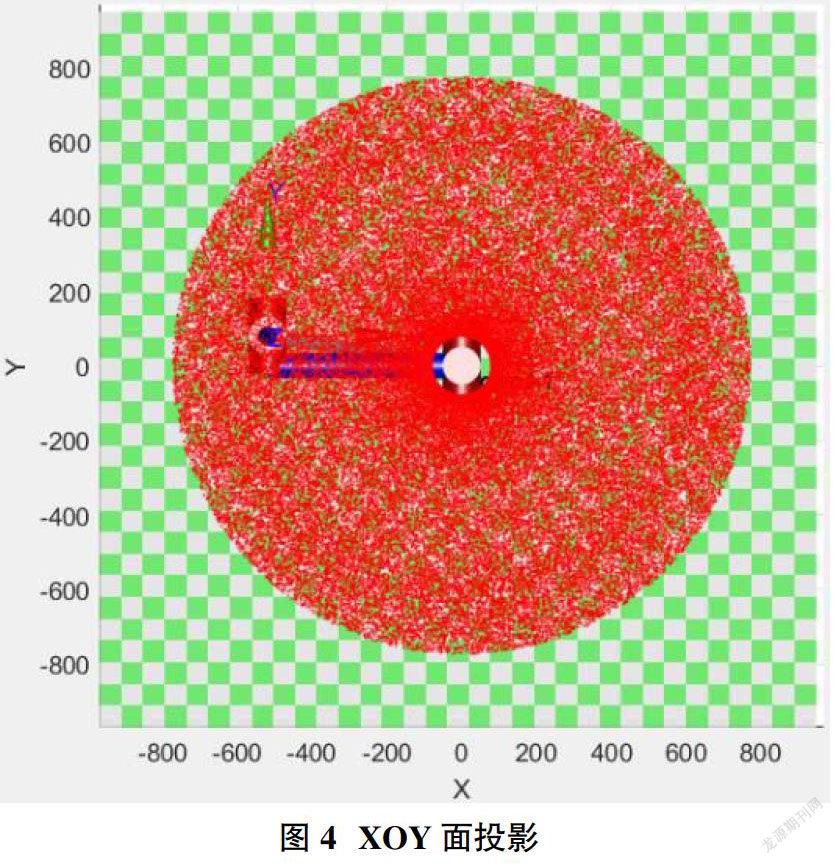
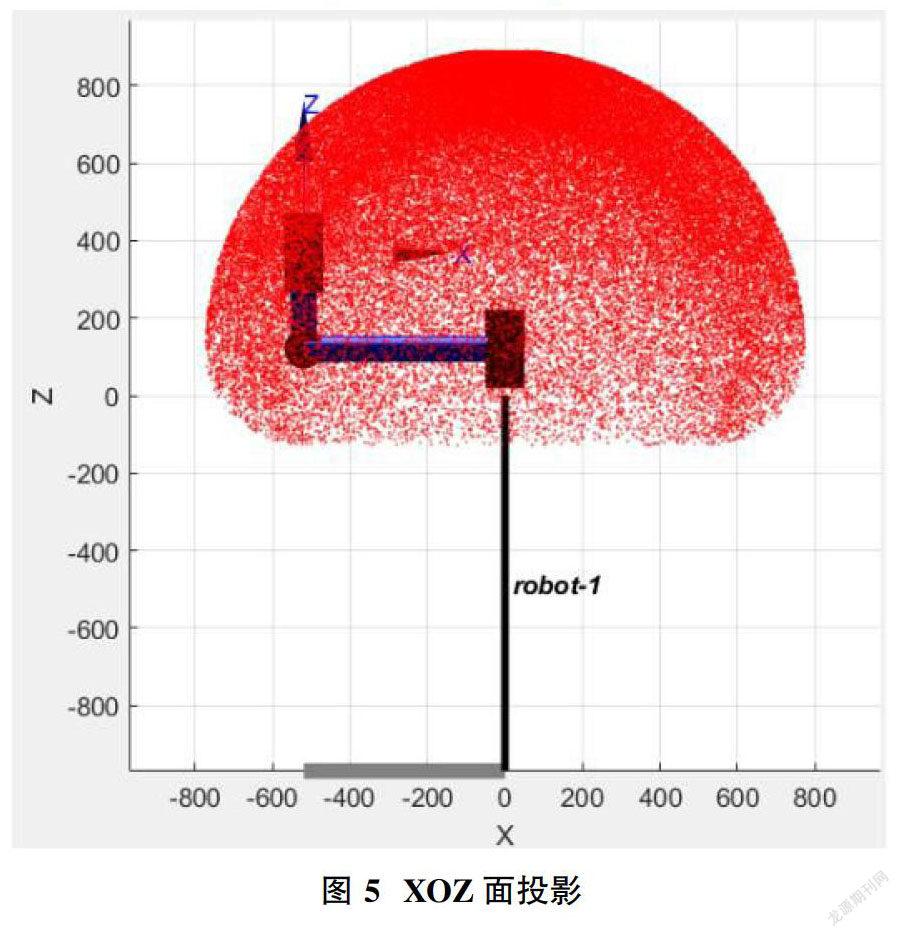
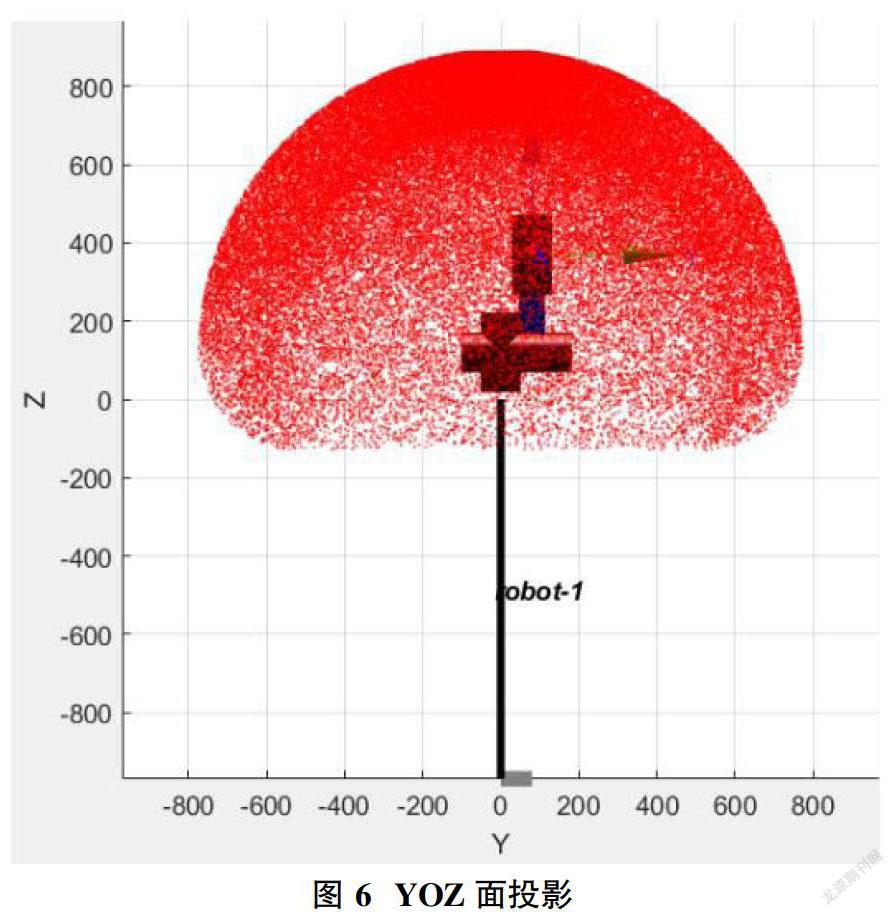
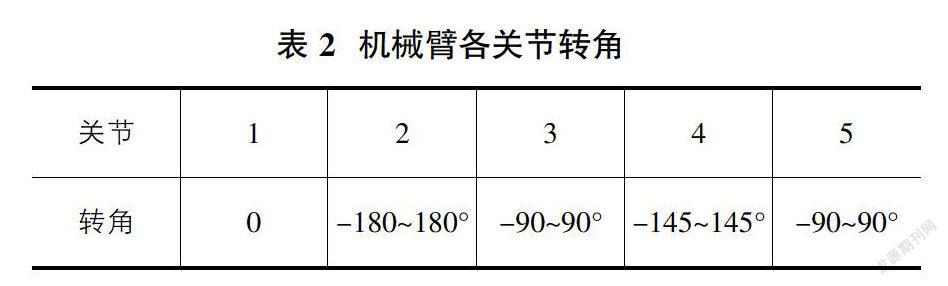
各关节转角如表2所示,得到工作空间在XOY平面、YOZ平面、XOZ平面的投影,如图4、图5、图6所示。
5 结论
针对CFETR包层维护设计五自由度冗余机械臂,利用改进型D-H参数法构建出机械臂运动学的数学模型,对正运动学、逆运动学分析,求解出机械臂正、逆工作方程的数学函数公式和运算求解过程。通过MATLAB软件中的机器人工具箱,对机械臂位姿仿真,验证机械臂正、逆运动学的准确性。对结果分析,确定结果与公式推导的数值基本一致,证明其准确性。通过蒙特卡洛法研究机械臂的工作空间,了解末端执行器所能到达的极限位置,确保其完成工作任务,为同类机械臂的研究提供参考和研究基础。
参考文献:
[1]邱励俭.聚变能及其应用[M].北京:科学出版社,2008:17-18.
[2]ZHOU Zibo,YAO Damao,ZI Pengfei.The research activities on re-mote handling system for CFETR[J].Fusion Engineering and Desing,2015(34):232-237.
[3]Kakudate S, Takeda N, et al. R&D Activities for ITER Blanket Remote Handling Equipment[J]. Fusion Engineering and Design, 2014.
[4]郑宇飞.基于人机工程学智能轮椅的设计与研究[D].合肥:合肥工业大学,2016:29-30.
[5]杨树风.带有机械臂的全方位移动机器人的研制[D].哈尔滨:哈尔滨工业大学,2006.
[6]陆佳皓,平雪良,李朝阳.基于MATLAB Robotic Toolbox的关节型机器人运动仿真研究[J].机床与液压,2017,45(17):60-62,81.
[7]周东辉.七自由度机器人逆运动学研究[J].山东轻工业学院学报(自然科学版),1995(04):56-61.
[8]李鑫,潘松峰, 尹宁宁,等.六自由度串联机器人控制系统设计[J].青岛大学学报(工程技术版),2017,32(02):108-111.
[9]陈赛旋.协作机器人零力控制与碰撞检测技术研究[D].合肥:中国科学技术大学,2018.
[10]赵智远,徐振邦,何俊培,贺帅,徐策.基于工作空间分析的9自由度超冗余串联机械臂构型优化[J].机械工程学报,2019,55(21):51-63.
[11]刘亚东.喷浆机械手定位误差与运动模式优化研究[D]. 长沙:中南大学,2013.
[12]胡明伟,王洪光,等.—种协作型机器人运动性能分析与仿真[J].智能系统学报,2017,12(1):75-81.
