基于多种组合优化算法外形优化设计
2021-08-11高志旺王志东凌宏杰
谢 鹏,高志旺,王志东,凌宏杰
(1.江苏科技大学 船舶与海洋工程学院,江苏 镇江 212003;2.江苏科技大学 海洋装备研究院,江苏 镇江 212003)
0 引 言
随着能源成本的日益增加和环保技术的日趋严格,对船舶的节能技术提出了更高的要求。因此,可以通过船型优化、安装船舶附体等方式提高船舶的快速性,来达到节能减排的效果。与此同时,船舶的快速性和耐波性是评价船舶性能的重要方式,在有波浪的恶劣海况下船舶会产生六自由度的摇荡运动,其中,垂荡、纵摇和横摇运动会对船舶的操纵性、快速性产生重大的影响。为了提高船舶在复杂海况下的安全性,可以通过船型优化、安装船舶附体等方式改善船体周围流场,抑制船舶摇荡,提高船舶在波浪中的运动和增阻性能。
提高船舶水动力性能的主要方式是改善其周围流场,而安装船舶附体是在不改变原有船型的基础上改善其周围流场最简便可行的方式之一[1]。水翼和鳍[2]可增加船体附加质量与阻尼,可显著减小船舶摇荡程度,但与此同时它们也增加了船舶的湿表面积,通常会引起船舶阻力的增加,通常会在安装水翼和鳍时在尾部安装尾压浪板、阻流板等其他附体减少船舶阻力的增加。尾压浪板[3]是在船舶尾部向后延伸出的一块板,通过增加船舶的虚长度,减少尾浪的方式改善尾部流场,从而减少船舶阻力。阻流板是船舶尾封板向下延伸出的一块板,它能提供纵倾力矩和减少破波的产生。船舶附体在减阻减摇方面具有较大的应用前景,因此有必要对附体的水动力性能进行研究。随着CAD 技术和CFD 技术的发展,使得船型和附体优化成为可能,通过分析船型参数和附体参数的改变对船体阻力性能的影响,进行特征参数的敏感度分析,可对船舶的改型设计提供帮助。在以后的改型设计中,设计者可以只通过调整敏感度大的参数,排除对船体阻力敏感度低的参数进行设计,节省设计人员工作时间,提高工作效率,缩短船舶建造周期。
本文以DDG1000 与球鼻首[4]组合新型DDG1000 船型为优化目标船型,建立与之对应的优化模型。为了提高寻优搜索的精度和速度,提出了组合优化策略[5–6]。在CAD 和CFD 集成优化框架内,运用组合优化策略对所建立起的船体模型进行求解,完成该船型线的优化,并对优化后的船舶阻力性能进行分析。
1 高速船型
1.1 初始船型
DDG1000 船长为182.88 m,型宽为24.6 m,设计吃水为8.4 m,航速为30 kn,按照缩尺比1∶70 进行船体建模。为使船体型线光顺,本文将DDG1000 主要分为船体前部、船体中部、船体后部三大主要区域进行单独建模。其中船体前部根据局部曲率复杂程度又细分为几个小面。DDG1000 主要参数如表1 所示。

表1 船体模型主要参数Tab.1 Main parameters of hull model
而本文球鼻首由于特种装备布置的需求,球鼻首参数较难选择阻力最小的构型。该球鼻首附体要求模拟水滴形首部线型并满足某型装置布置的空间要求。
1.2 计算模型建立
基于三维建模软件CAESES 完成DDG1000 的参数化建模,在不改变外形结构特征,忽略严重影响网格划分的对水动力影响较小的部件前提下对模型进行简化处理。
坐标原点位于DDG1000 尾封板位置处,指向首部为x轴正方向,左舷为y轴正方向,计算模型和网格划分如图1 和图2 所示。

图1 DDG1000 计算模型及坐标系Fig.1 DDG1000 calculation model and coordinate system
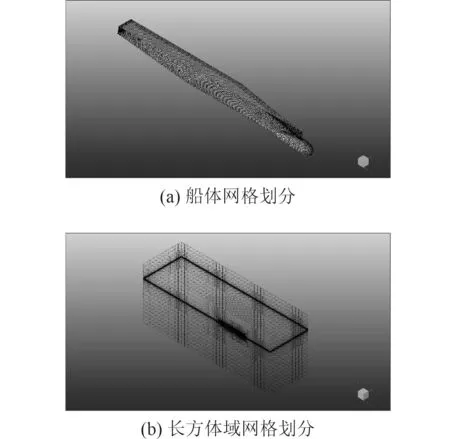
图2 模型网格划分Fig.2 Mesh generation of the model
1.3 数值计算和边界设置
为准确进行DDG1000 的数值仿真,计算采用全六面体非结构网格,遵循整体非结构化,局部加密的原则。计算域为长方体域,因为船型是对称型,故采用半船模型进行计算,长方体域5L*1.5L*2L(其中L为船长)。
模型数值计算的边界条件设置如下:上下边界选用规定压力梯度,对称面设置为mir 面,其他边界采用速度远场边界,以均匀流场作为数值计算的初始条件;各个面选用壁面函数;整个流场采用非定常条件,在非定常计算过程中,取时间步长△t=0.01 s,流体参数设定为15℃海水,密度为1 026 kg/m3,动力粘性系数取0.000 9 Pa·s;
1.4 计算工况
计算航速包括低中高各个航速范围,傅汝德数分别为0.2,0.25,0.3,0.35,0.4,0.45,0.5,0.55,对应的航速为1.01,1.26,1.52,1.77,2.02,2.28,2.53,2.78 八个工况。
1.5 结果对比
通过CFD软件得到的仿真结果与实验结果进行对比,如图3 所示。可知,数值计算结果与试验结果吻合良好,误差小于2.5%,从而证明了本文所采用的数值方法的有效性.。

图3 结果对比图Fig.3 Comparison of results
2 基于多种组合优化算法优化方法
2.1 优化算法
遗传算法[7–8]借鉴自然进化规律,模拟种群的进化过程,通过种群之间选择、相互之间杂交和代数之间变异等获取内部最优解,属于具备生存和检测的随机搜索算法。NSGA-Ⅱ是最具影响力的多目标优化算法之一,有3 种突出特点:1)为了提高算法的收敛速度,采用快速非优势排序;2)通过定义拥挤距离,有效避免了共享参数选择的困难;3)采用精英策略,保证下一代种群优于上一代种群。因此,选择NSGA-Ⅱ算法。
Sobol Method[9]是半随机序列,基于低偏差序列的直升机易损性计算方法。该序列是一种稳定性和覆盖性都非常好的随机序列,与局部法相比的Sobol 方法具有参数变动范围可扩展到整个参数定义域。
Tangent Search Method[10]为切线搜索法,属于直接搜索方法,被用作搜寻任意超过一个设计变量且受任意等式和不等式非线性约束问题的最小值。切线搜索法的基本思想是:当一个试探移动通过约束边界时,在当前可行的基点上不满足约束函数的偏导数将会被近似替代。这是通过最基本的差分方法来执行的。利用差分法对目标函数的偏导数进行近似处理,在考虑进一步计算之前,这个差分法就可以用一个单独的函数来进行描述。每一次试探搜索都是为了减少不必要的评估约束函数的辅助运算过程,以此来提高搜索效率。随后,一个试探性移动将会在一个超平面上执行,这一超平面是和约束函数的超曲面相切的平面(这一超平面可以向可行域微小地移动,以便这个超平面能够将当前的基础解包含在内)。如果这个探索是成功的,那就称这次试探为“切线试探”。因为切线搜索法完全不需要考虑目标函数的梯度,所以计算效率得到了很大的提高。
2.2 优化方案
对船体型线进行优化,首先要选择合适的优化算法,适当的优化算法可以提升优化精度与速度。首先选择Sobol 算法,然后Sobol 优化算法与NSGA-Ⅱ优化算法进行组合,Sobol 优化算法与Tangent Search Method 优化算法进行组合,比较这2 种优化算法的优点。优化目标为在设计航速2.02 m/s 的情况下阻力最优。
在优化之前需要建立恰当的优化模型,对DDG1000进行优化获得最小阻力是典型的最优化问题。最优化问题都有关键因素包括优化目标、设计变量、约束条件。
1)设计变量的选择
对船体进行优化时,选择的重点优化对象为球鼻首,球鼻首的高度变形曲线、宽度变形曲线,长度变形曲线、球鼻首最低处特征曲线的正切值,最高处特征曲线的正切值,球鼻首与船体过渡曲面的高度值,船体尾部特征曲线正切值等11 个值作为设计变量。
2)约束条件的选择
为了使得优化后的船体模型满足设计要求和进行优化前后的对比,需要对船体模型进行一些有必要的约束,选择在优化过程中,船体的排水量保持不变。
3)优化目标的选择
选择在设计航速2.02 m/s 的条件下船体总阻力最小。
3 优化结果分析
3.1 组合优化算法结果分析
利用Sobol 优化算法、NSGA-Ⅱ优化算法作为第1 组优化组合算法,Sobol 优化算法、Tangent Tsearch Method 优化算法作为第2 组优化组合算法,在生成船体模型个数相同的基础上,计算消耗时间相差不多,第1 组稍微短一些;生成的船体模型阻力第1 组最优,其中第2 组优化算法阻力值结果比较集中趋于某一个值,有可能陷入局部最优解中。综上比较,第1 组组合优化算法比第2 组组合优化算法具有优势。
3.2 设计变量变化分析
如上所述,第1 组优化组合算法具有较大优势,因此所选取的设计变量分析结果,都取自第1 组组合优化算法。
表2 为船体模型设计变量优化前后的对比。可以看出,设计变量的变化都在取值范围内,符合要求。从球鼻首的长度、高度、宽度变形结果来看,球鼻首的长、宽虽有增加,但对船体阻力不敏感,球鼻首的高度变形对船体阻力比较敏感,最终球鼻首变成抬首型。
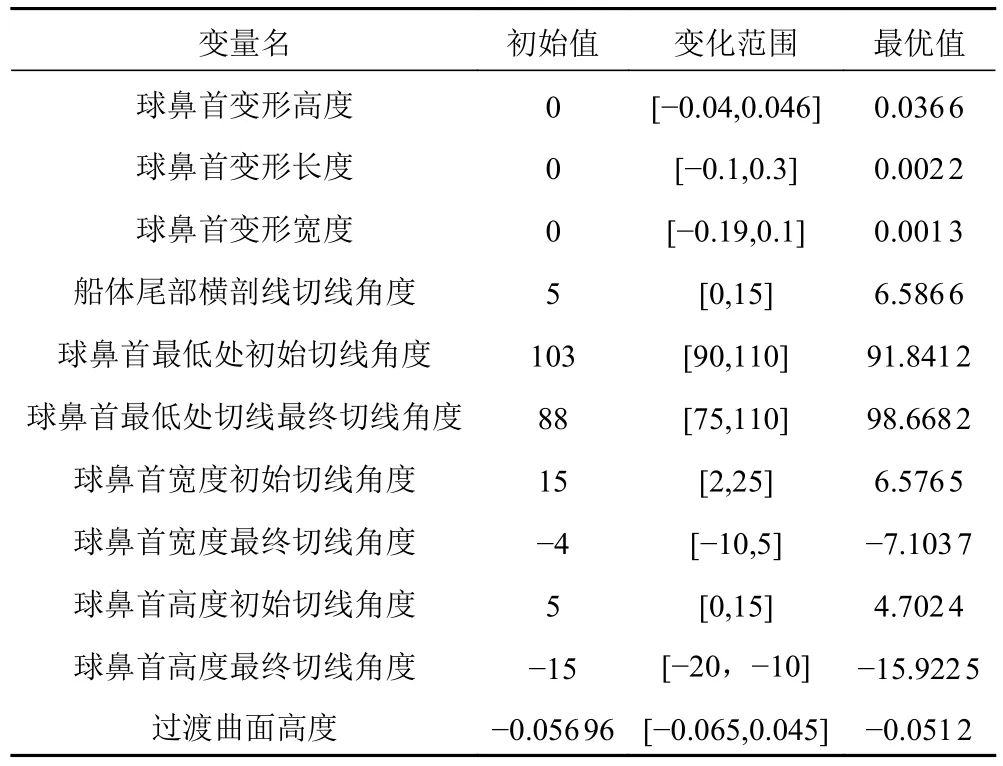
表2 设计变量Tab.2 Design variable
3.3 阻力结果对比分析
以设计航速2.02 m/s 速度下的总阻力为优化目标,并对各种阻力成分进行分析,并加算对比速度为1.77 m/s 下的阻力变化,如果如表3 所示。
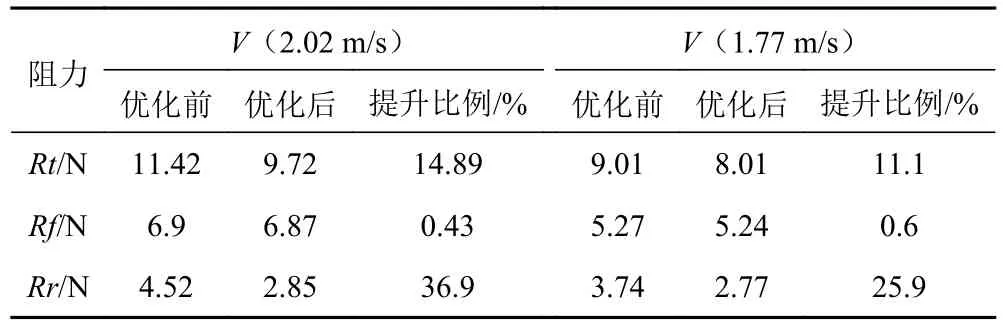
表3 阻力变化Tab.3 Resistance change
在2.02 m/s 的速度下,优化后的总阻力为9.72,比优化前的总阻力减少14.89%,摩擦阻力减少0.43%,剩余阻力减少36.9%。在1.77 m/s 的速度下,优化后的总阻力为8.01,比优化前的总阻力减少11.1%,摩擦阻力减少0.6%,剩余阻力减少25.9%。在优化过程中,船体的排水量保持不变,船体的湿表面积基本不变,所以摩擦阻力基本不变,通过优化球鼻首,改善了船体周围的压力分布,减少了兴波阻力。图4 和图5 分别表示优化前后的船体模型。

图4 优化前船体模型Fig.4 Pre-optimization hull model

图5 优化后船体模型Fig.5 Optimized hull model
图6 和图7 分别为优化前后的自由液面波形图。可以看出,优化后船首周围波形数减少变稀疏,有助于减少船首周围的兴波阻力。
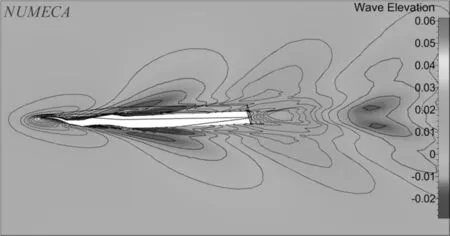
图6 优化前自由液面波形图Fig.6 Free surface waveform before optimization

图7 优化后自由液面波形图Fig.7 Waveforms of optimized free surface
4 结 语
本文利用CFD 软件对新型DDG1000 的水动力性能开展了数值计算分析,并将CFD 结果与试验结果进行对比,验证数值方法的准确性。利用CAESES软件对DDG1000 进行参数化建模,基于FINEMARINE 和CAESES软件集成平台,基于在设计航速为2.02 m/s,采用2 种组合优化算法对船型进行优化,并对比了2 种组合优化算法的优缺点。结果证明,优化后的总阻力减少14.89%,摩擦阻力减少0.43%,剩余阻力减少36.9%。
