无源定位技术发展动态及其应用分析
2021-08-05李康丁国如李京华钱惠明刘宁松
李康 丁国如 李京华 钱惠明 刘宁松
摘要:无源定位通过接收目标的有意、无意辐射或反射信号来实现定位,定位系统不向外界发射电磁波信号,具有隐蔽性好、作用距离长、生存能力强等特点,在民用和国防领域均具有广泛的应用。本文从无源定位内涵与特点、在军民领域的典型应用、关键性能指标、无源定位关键技术以及基于外辐射源照射的无源定位五个方面探讨了国内外研究现状和技术特点,并展望了无源定位技术的未来发展趋势。
关键词: 无源定位;非合作定位;黑飞无人机;黑广播
中图分类号:TJ765;TN971 文献标识码: A 文章编号: 1673-5048(2021)02-0104-09
0 引 言
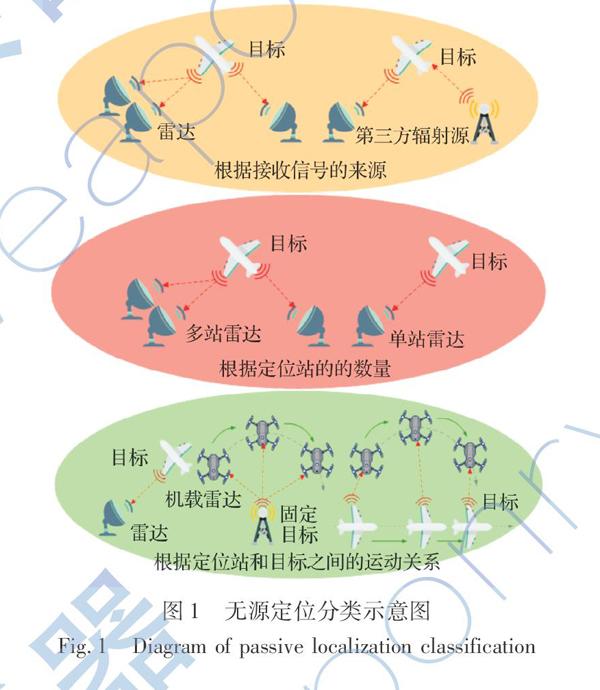
有源定位(Active Localization)通过雷达、声呐、激光等有源设备对目标进行定位的技术,具有稳定、精度高的优点。然而,有源定位系统依靠的是发射大功率信号、接收相同的反射信号,再以信号从有源设备到目标的来回时间推算出双方之间距离,实现定位。因此,有源定位系统容易暴露自己,被对方发现从而采取反电子侦察等电子防御方法,使定位精度大大下降,甚至遭到电子干扰、电子欺骗等软杀伤和电磁毀伤与反辐射武器攻击等硬杀伤,对定位系统自身安全造成极大隐患。无源定位(Passive Localization)通过接收目标的有意、无意辐射或反射信号来实现定位,即不向外界发射电磁波信号来探测目标的位置,只通过接收电磁波信号实现对侦察目标的探测、定位与追踪。接收的电磁波信号可以是目标直接辐射的信号,也可以是外辐射源照射到目标后反射、散射的信号。因此,根据定位系统接收电磁波信号来源的不同,无源定位可分为基于目标辐射信号的无源定位和基于外辐射源照射的无源定位。还可以根据其他特征进行分类:按定位站的数量,分为单站无源定位和多站无源定位。按定位站和目标间的运动关系,分为固定站对运动目标定位、运动站对静止目标定位和运动站对运动目标定位等。图1所示为无源定位分类的示意图。
虽然无源定位以作用距离长、适应复杂环境、隐蔽性良好等特点,受到各个领域和世界各国的重视,但无源定位在有效信号截获、参数测量技术、系统处理能力、定位精度与速度等方面仍具有很大进步空间。本文围绕无源定位关键技术及其应用分析,从无源定位特点、在军民领域的应用、关键性能指标、无源定位关键技术及基于外辐射源照射的无源定位等方面探讨了国内外研究现状和技术特点,并展望了无源定位技术的未来趋势。
1 无源定位特点
(1) 顾名思义,无源定位最大的特点即无源,定位系统只接收信号不发射信号,故定位系统不易被对方感知,隐蔽性良好,也不易被干扰、破坏,生存能力强。
(2) 无源定位一般需要多站协同工作。这是因为对于静止固定的探测目标,单个定位站只能捕获该辐射源信号的时间、方位角、频率等参数,无法有效计算出距
离。对于运动的探测目标,如卫星、飞机等运动速度很快的物体,可在短时间内移动到相差距离较大的位置,单个定位站可在短时间内接收到来自不同位置的辐射源信号进行定位;但无人机等运动速度较慢的物体,无法在短时间内移动很大距离,则需要多站协同定位。多站协同定位不仅指各个定位站信息互通共享,还指定位站间的同步性,包括工作的时段、频段等[1]。
(3) 无源定位对目标位置的估算往往要经过复杂计算。一般定位站需要经过信号截获、分选处理、信号配对等处理流程,才可能对探测目标正确定位[2]。然而,也存在利用压缩感知[3]、深度神经网络[4]等直接进行定位的技术,大大降低了计算复杂度和处理时间。
(4) 无源定位的定位效果与定位站的分布有关,需要依据不同的定位应用场景,对定位站进行具体的布局。
2 无源定位应用
无源定位在国防领域,尤其是在电子对抗战电子侦察方面发挥着重要且出色的作用[5-7]。无源定位以己方、敌方或中立方的民用、军用辐射源做外辐射源,适用于在侦察目标不知情的状况下,对目标进行定位和追踪,掌握目标长期活动的位置轨迹和规律,对目标发起精确攻击,在空域预警[5]、海域监测[6]、地面非法入侵[7]、水面舰艇定位[8]等领域有着丰富应用。
2.1 网络中心战中的无源定位[9-10]
美军网络中心战不仅要求快速融合足够多的目标信息和作战命令到各级作战单位,以击溃对方的综合防空系统,还需要精准快速捕获高速机动目标,掌握其位置信息、活动轨迹,发起精确武器攻击。Suter计划作为美军网络中心战重要组成部分,集监视、入侵、控制、进攻功能于一体,利用大量无源定位和通信网络技术,无源定位设备间协同工作进行地理位置定位,不同平台将大量截获信号的测量参数及定位结果记录到通用数据库中,以辅助其他设备或控制中心在执行任务时作参考。随着数据库记录的完善,多平台间的协作定位往往优于任何一个平台的定位精度和定时时间。除了地理位置信息外,其他信息通过网络中心协同瞄准系统(Network Centric Collaborative Targeting,NCCT)能够在数秒之内融合多平台的数据并对敌方辐射源进行识别、定位、跟踪,注入假目标欺骗信号,引诱对方搜索无效的空间范围,再注入假指令破解对方发送的无线电报文内容,最终完全控制对方的防御系统。
2.2 机载系统上的无源定位[11]
机载无源定位系统精度高、速度快,往往匹配了以数字接收机为核心的新型参数测量技术,如数字式相位干涉仪测向、数字式相位差测量仪等,大大提高了参数测量的精确度和定位处理能力。信号情报(Signal Intelligence,SIGINT)飞机利用其他战术飞机上的雷达预警接收器(Radar Warning Receiver,RWR)提供的参数信息对外辐射源进行精确定位,与战术飞机协同作战,引导战术飞机发起精确攻击,或为地面雷达提供信息以实现目标追踪。美国开发的无源测距分系统(Passive Ranging Subsystem,PRSS)计划、精确定位和识别(Precise Localization and Identification,PLAID)技术也是利用机载RWR设备测算多普勒频差和到达时间差,再估算出外辐射源的位置,系统定位精度高、速度快。先进战术瞄准技术(Advanced Tactical Targeting Technology,AT3)则以多个战术飞机间的数据链来共享到达机载小型天线的到达角信息,当多个战术飞机等间隔分布且与威胁目标达等数量级距离时,可实现对多威胁目标的高精度定位。
2.3 针对黑飞无人机的无源定位[12-14]
雷达一般用于探测和追踪大型飞机,然而由于无人机的雷达反射截面较小且常常处于低空低速飞行状态,因此应用于无人机探测和追踪的雷达技术较为困难。即便如此,多基雷达捕获并分析由无人机产生的微多普勒信号后,利用多普勒定位法和到达时间定位法可以实现对目标的高精度定位。基于无人机音频信号的无源定位也常用于对黑飞无人机的探测追踪。无人机在飞行过程中,电机和快速旋转的螺旋桨会产生音频信号,通过部署一定范围的声传感器,测算音频到达传感器的到达角度和到达时间,便可估计出无人机的位置,但基于音频信号的定位方法对环境噪声敏感,且探测距离往往受限。基于射频信号的RSS(Received Strength Signal)/DOA(Direction of Arrival)方法对于黑飞无人机的定位也有良好的定位效果,但受其他射频信号噪声、非视距传播、多径传播等因素较大。5G行业应用场景中,无人机需要利用5G基站进行联网通信,以进行线路巡检、交通管理和陆空协同、应急通信和救援等方面的工作,用途十分广泛。因此,5G场景中对黑飞无人机的定位和监测十分重要。基于5G蜂窝网络的黑飞无人机定位方法,主要利用5G信号作为外辐射源,搭配5G关键技术实现对黑飞无人机厘米级精度的定位。5G处于毫米波频段,收到无人机的雷达反射截面更大,更容易发现小型无人机;超宽带使距离分辨率更高;大规模天线阵列与空分复用、波束赋形,使定位过程中数据通信的抗干扰能力更强,定位系统具有更高的空间分辨率。
2.4 针对黑广播的无源定位[15-16]
黑广播会干扰正常的通信系统,扰乱重要的公共服务,危害性十分严重。然而黑广播的发射信号参数未知、易变,且发射源通常藏匿于隐蔽的位置,因此实现高精度的黑广播定位面临许多挑战。取缔黑广播,一般需要固定监测站和可移动设备的联合定位,固定监测站发现分析接收信号参数异常确认黑广播发射源的大致范围,再出动车辆、无人机等可移动设备进行更精确的定位。可移动设备一般采取接收信号强度定位法,利用天线阵列各个单元接收到的相位差或互相关值进行作为训练阶段的数据值,通過插值和回归的方法进行数据匹配,实现指纹定位。
2.5 针对伪基站的无源定位[17-18]
伪基站主要利用移动通信协议中的漏洞,诱使用户手机选择进入伪基站区域,从而获得如国际移动用户识别码(International Mobile Subscriber Identity,IMSI)、国际移动设备识别码(International Mobile Equipment Identity,IMEI)等用户信息,在发送恶意垃圾信息后,再中断与伪基站网络间的连接,使其接入正常的通信网络。伪基站会对各种移动通信网络制式的手机发起攻击[19],但主要以全球移动通信系统(Global System for Mobile Communications,GSM)制式的伪基站攻击为主,攻击者会刻意提升GSM信号的强度或发送干扰信号,迫使用户接入GSM网络。伪基站定位要以伪基站检测为前提,伪基站与正常基站在广播频点稳定性、位置区码(Location Area Code,LAC)等参数设置、信号强度、网络切换频率等方面有很大不同,因此常将这些差异作为监测系统检测伪基站的主要依据。在检测出伪基站后,一般先采用信号传播距离与衰减程度的RSS、DOA、到达时间(Time of Arrival,TOA)、到达时间差(Time Difference of Arrival,TDOA)等测距定位法,或RSS指纹定位等非测距定位法,逐步逼近计算出伪基站位置。
除此之外,对基于外辐射源照射的无源定位,还可利用电视广播或大型雷达的非合作信号监测隐身目标和无线电静默目标的运动[20]。如英国开发的以电视音频调幅(Amplitude Modulation,AM)信号作为外辐射源的无源雷达系统,美国以电视和广播调幅(Frequency Modulation,FM)信号研制的“沉默的哨兵”无源探测系统。且利用第三方民用、商用电视广播信号、通信信号、全球定位系统(Global Positioning System,GPS)信号等非合作信号越来越成为近些年来无源定位发展的方向[5,21-26]。这些都是无源定位涉及国家安全、信息安全、用户安全的重要应用。在民用领域,无源定位在室内定位[27-28]、无人仓库管理[29]、车辆定位[30]、井下人员定位[31]、闪电探测[32]等各个领域发挥着重要的作用。
3 无源定位关键性能指标
当无源定位系统监测到来自外辐射源信号时,要立即选择合适的定位体制、测量定位体制所需参数,再根据定位方程解出所有可能的目标解,其中必然包含误差,需要利用不同算法对误差进行优化,得出对目标位置估计的最优解。影响无源定位性能的因素有许多,其中,定位精度、定位时间和定位范围是无源定位的关键性能指标,应着力减少其他因素对这些关键性能指标的影响。
3.1 定位精度
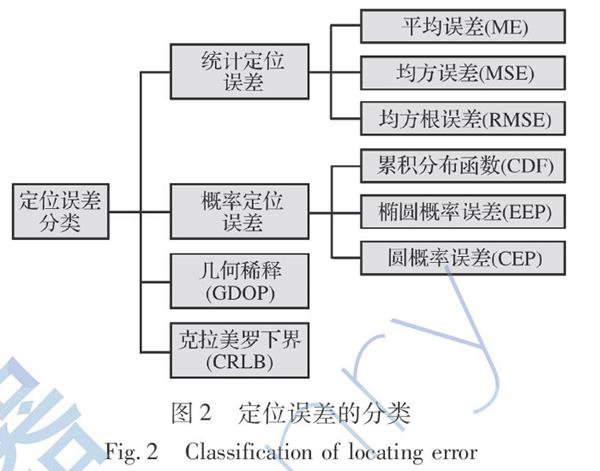
定位精度往往与定位体制、定位算法和相应的参数测量误差有关。对于一个无源定位系统,改变其定位体制选择、参数测量方式、定位方程求解中的任何一个因素,都将会随机影响其定位精度。一般以定位误差(目标空间位置的估算值和真实值之间的差值作为定位误差)来评估和度量定位精度。无源定位系统中的定位误差分类如图2所示。
3.2 定位时间
无源定位系统中的定位时间指从探测到目标信号出现至求解出目标空间位置整个过程的全部时间,其中包括参数观测时间、数据传输时间和定位处理时间。然而对于事先已经建立好有关目标辐射源数据库的无源定位系统,定位时间会大大缩短。非实时的无源定位系统一般针对静止目标的定位,因此对于定位时间的要求不高。而实时的无源定位系统主要是对运动目标进行定位,因此定位时间要足够短以保证对目标的实时估计和追踪。很大程度上,定位体制的选择将影响定位时间。如一点定位中对目标信号的观测时间是主要影响因素,动态定位中定位站的运动速度和观测时间是主要影响因素,交叉定位中多站间的数据传输和融合时间将对定位时间产生主要影响。
3.3 定位范围
定位范围一般包含两个意义,定位信号范围和定位地域范围。定位信号范围指系统能够对什么样的电磁波信号进行定位,强调定位系统针对各类电磁波信号的适用范围,包括可定位信号的频段和可定位信号的类别;定位地域范围指系统在具体的使用环境下能够对多大地域范围内的电磁波信号进行定位,强调定位系统的环境适应性,固定站定位时通常产生绝对地域,移动站点定位时通常会生成相对于定位站点的相对地域范围,对于定位地域范围的描述可从定位面积和定位区域形状两个角度展开。
4 无源定位关键技术
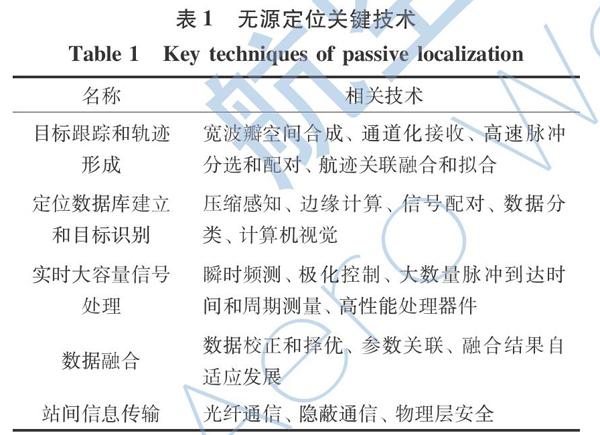
无源定位系统在发展过程中出现了许多亟待解决的关键技术,如目标跟踪和轨迹形成、定位数据库建立和目标识别、实时大容量信号处理、数据融合、站间信息传输等。特别是在电子干扰、电子诱偏等复杂电磁环境下,无源定位系统需要解决对多信号的判断和识别,与定位数据库内的结果进行对比,配合雷达等有源定位设备进行协同定位。表1所示为无源定位关键技术及其所对应的相关技术。
然而,无源定位系统最重要的关键技术还是获取位置信息。实现对目标的精准定位,主要关键技术在于参数测量和定位方法。
4.1 参数测量
作为影响定位性能的关键因素,准确的测量数据及测量误差的处理是任何定位算法都难以回避的必要环节。优秀的定位算法可在误差一定的情况下尽可能提高定位精度,但永远无法突破误差所导致的精度上限。因此,聚焦于测量误差处理、准确估计参数是对提高定位精度的有力支撑。表2所示为不同测量参数的估计方法。
4.2 定位方法
无源定位的体制较多,包括一点定位、动态定位、交叉定位等,根据辐射源与定位站间相对运动状态、定位站数量等具体特征应选用不同的定位体制。如一点定位适用于单固定站对运动辐射源的定位,动态定位适用于单运动站对静止辐射源的定位,交叉定位适用于多站对运动辐射源的定位。主要的无源定位方法有以下8种。
4.2.1 接收信号强度(RSS)
基于RSS(Received Signal Strength)的定位法根据传感器网络间链路信号强度的实时变化来进行定位。该方法首先需要在探测区域的周围部署一定数量的传感器,传感器网络中任意两个节点之间建立无线通信链路。当目标进入探测区域时会引起目标周围无线通信链路信号强度的改变,测算出前后的信号强度之差,再根据不同的定位算法估算出目标的空间位置,如图3所示。
RSS定位法主要有:基于路径传输损耗模型[33-34]和基于指纹定位[35-36]模型。前者以接收信号强度之差作为信号的路径传输损耗,根据传输能量损耗与传输距离的数学关系选择合适的信道传输模型后,计算出目标与传感器节点间的距离。后者实现定位首先需要经过离线训练阶段,记录原始RSS值、建立数据库,进入在线匹配阶段后,将实时RSS与数据库中的RSS进行比较,利用相关算法选出最匹配的RSS值,该RSS值对应的预设位置即为目标进入探测区域的位置。RSS定位法适用于室内或范围较小区域的定位,具有实现方便、成本和功耗低、部署简单等优点,但实际传播环境中信号存在阴影衰落、多径效应、非视距传播等现象,造成定位精度大大下降。不仅如此,RSS定位法还存在不同无线信号共存、相互干扰的现象,影响定位效果。
4.2.2 测向定位法(DOA)
DOA(Direction of Arrival)定位法又称三角定位法,主要根据目标辐射源到达定位站的方位角来进行定位[34,37-38]。在不同空间位置下目标的辐射信号到达定位站时方位角不同,确定每个方位角对应的方位线,测得的多条方位线可能相交于一点,该交点即为目标辐射源的空间位置,如图4所示。
DOA定位法具有所需数据量小和处理方法算法简单的优点,但仅靠方位角来进行定位,定位站能够捕获目标辐射源的信息相对较少,影响定位精度。且该方法较大程度上受方位角测量精度影响,方位角的测量误差往往导致多条方位线不能相交于一点,造成对目标无法有效定位[39]。当多条方位线相交时,一般通过求解相交区域的质心坐标作为目标位置。提高定位精度可以通过不同算法或准确的测量值来实现,现有的DOA定位算法主要有基于加权最小二乘(Weighted Least Square,WLS)和极大似然估计(Maximum Likelihood Estimation,MLE)。对于DOA定位法来说,若想实现较大的定位精度主要依靠具有较高测量精度的测量设备,而测量设备往往很难达到这样的要求。除此之外,DOA定位法由于定位时间较长,所以比较适合于静止目标或运动速度较慢的目标,对移速较快的目标,DOA定位法的定位误差较大。
4.2.3 到达时间定位法(TOA)
TOA(Time of Arrival)定位法根据目标辐射源到达定位站的传播时延,以此计算出目标辐射源到定位站的距离来进行定位。在视距传播(Line-of-Sight,LOS)的情况下,目标与定位站间的直达距离完全取决于传播时延。以定位站为圆心、目标与定位站间的距离为半径作圆,多个圆相交于一点,该交点即为目标辐射源的空间位置,如图5所示。TOA定位方法一般需要至少三个以上的定位站,若为两圆相交则会出现歧义解[34,38,40],如图6所示。
TOA定位法首先必须要对目标辐射源的时间特征进行精确测量,才能获得目标的移动速度和距离信息。确定目标辐射信号的脉冲周期,精确校准定位站与目标的时间同步,定位精度才可以有较大的提升。此外,目标辐射信号在传播过程中由于存在噪声、多径干扰等信道状态不佳或非视距传播等原因,多个圆可能没有相交于一点的情况,造成定位精度下降。
4.2.4 到达时间差定位法(TDOA)
TDOA(Time Difference of Arrival)定位法又称双曲线定位法,主要根据目标辐射源到达各定位站的时间差来进行定位。与TOA定位法相似,需要至少三个以上的定位站实现定位,但TDOA不需要目标和定位站间精确的时间同步。TDOA各定位站在严格的时间同步下接收来自目标辐射源的发射信号,指定一个参考站,测算参考站和其他各站之间的传输时间差,以此推出距离差。以每个定位站为焦点、距离差为长轴作双曲线,各双曲线的公共交点即为目标輻射源的空间位置[34,37],如图7所示。
TDOA定位法精度高、速度快、系统复杂度低,保证各定位站严格的时间同步、准确估计目标与各定位站间的时间差是TDOA定位法的关键。常用的时间同步方法有搬运钟法、主站授时法和授时中心法。目前,时间差参数估计方法主要有互相关法、匹配滤波器等时域相关法、频域估计法和多重信号分类(Multiple Signal Classification,MUSIC)特征值匹配等方法。值得注意的是,TDOA定位法中除了噪声和测量误差是产生定位误差的主要因素外,长基线时差定位会存在匹配模糊问题,定位系统和目标之间的相对运动会引起时差模糊现象。
4.2.5 多普勒频率定位法(Doppler Frequency)
多普勒频率定位法主要根据目标到达定位站的载波频率(FOA)和目标辐射信号频率之间存在频率差这一特性来进行定位[41]。当目标辐射源发射的信号连续时,定位站和目标之间的相对运动会产生多普勒效应,表现为定位站与目标接收信号的频率之差。联立三个站点以上的定位方程,求解得出目标辐射源的空间位置:
fi=c±v0c±vsf0 i∈N*
式中:fi为定位站i接收到的频率;f0为目标发射的原始频率;c为电磁波在自由空间中传播的速度;v0为定位站移动速度,若接近目标则运算符号为+号,反之则为-号;vs为发射源移动速度,若接近定位站则运算符号为-号,反之则为+号。另外,也可根据各定位站间的多普勒频差(Frequency Difference of Arrival,FDOA)进行定位:
fij=c±v0ic±vs-c±v0jc±vsf0 i,j∈N*且i≠j
多普勒频率定位法对频率测量精度较为严格,主要的频率测量法有差分法和互模糊函数法。
4.2.6 相位差变化率定位法
在定位站与目标存在相对运动的情况下,将相对运动速度分解出切向速度,利用接收信号的相位差变化率测算方位角变化率,以此估算定位站与目标间的距离,再结合目标的方位角,得出目标辐射源的空间位置。这是一种运动学结合交叉定位的方法,常用于运动单站对固定目标的定位[38,42]。
4.2.7 多普勒频率变化率定位法
类似于相位差变化率定位法,多普勒频率变化率定位法利用目标运动时的径向速度在定位站上产生的多普勒频率变化率来进行定位[43-44]。
4.2.8 混合定位法
单独的定位方法在实际应用中存在诸多缺点,混合定位通过同时测量多个参数来提高定位性能,达到互补的效果。文献[45]指出RSS在短距离内定位更精确,TOA则在长距离时定位效果更好,然而单独采用RSS或TOA都无法很精确地解决中间距离的定位问题。利用RSS和TOA在实际接收过程中的弱相关性,分别提取出接收信号中的RSS和TOA参数进行RSS/TOA联合定位,在中间距离定位问题上实现了优势。文献[46]提出了一种在非视距传播(Non-Line-of-Sight,NLOS)下基于SR-WLS(Squared Range-Weighted Least Square)算法的RSS/TOA联合定位方法,将原来的非凸问题转化为广义信赖域子问题,结果显示在NLOS情况下比传统的单独定位方法具有更高的定位精度。文献[47]所提的RSS/TDOA定位算法在传感器网络中具有定位精度高、收敛速度快、实现复杂度低、功耗低等优点。文献[48]提出的DOA/TOA定位方法分别在多径效应和低信噪比场景下估计目标辐射源的空间位置,比指纹定位方法有更优异的表现。文献[49]所提的DOA/TDOA联合定位与单独使用AOA相比,可产生更好的定位精度,且减少了所需传感器的数量。文献[50] 中使用TDOA/FDOA方法解决了移动目标的定位,在中高噪聲水平下显著优于现有方法,并通过大量的数值结果进行了验证。文献[51] 在低信噪比条件下,TDOA/FDOA/差分多普勒定位表现良好,且能够克服相对多普勒压缩问题。
5 基于外辐射源照射的无源定位
基于外辐射源照射的无源定位,也称非合作定位。世界上每时每刻都会有大量的第三方民用、商用电磁信号向空中辐射,电磁波资源十分丰富,当这些信号在空中遇到目标时会产生电磁波的反射、散射,其中的一部分将被无源定位系统接收到,故利用第三方民用商用电视广播信号、通信信号、GPS信号等非合作信号实现定位是无源定位的另一重要发展方向。基于电视广播信号、通信信号等外辐射源的无源定位有利于对隐身目标的追踪、无线电静默目标的探测,且这些外辐射源信号具有分布广泛、全天候工作的优点,系统的可靠性高[52]。利用来自外辐射源的直射波及外辐射源照射到被探测目标的反射、散射回波信号,以此实现目标的侦察探测、定位和追踪,其核心技术是无源相干定位(Passive Coherent Localization,PCL)技术[53],即在接收系统设置双接收信道:一个为参考信道,用于接收来自外辐射源的直达波信号;另一个为目标信道,用于接收来自目标的反射回波信号。利用PCL技术对直达波信号和回波信号进行一系列信号处理后,便能够提取出目标到达接收系统的时间、角度、频率等参数信息,再对提取到的参数信息进行单独或联合的数据处理,实现目标的探测、定位、追踪,如图8所示。
外辐射源照射无源定位处理流程如图9所示。其中直达波提纯、杂波抑制和微弱目标检测是外辐射源照射无源定位的关键技术[20,54]。
5.1 直达波提纯
系统的参考信道除了接收外辐射源的直达波外,还会接收到经建筑物等反射的多径信号,而实现相干检测需要纯净的直达波与目标回波作匹配积累,因此参考信道能否接收良好的相干参考信号(直达波)十分关键。一般相干检测系统中接收的参考信号是已知的,而以非合作信号作为参考信号时,其波形和参数具有较强随机性,因此实现相干检测较为困难。利用复倒谱、自适应均衡等技术抑制多径干扰,或对直达波进行信号重构可以获得较为纯净的直达波[55-57]。
5.2 杂波抑制
目标信道用于接收目标回波信号,但在实际接收过程中,目标信道不可避免地会接收到直达波和多径效应等产生的杂波。这些杂波往往是强干扰,信号能量较强,但目标回波信号能量较小,甚至常淹没在这些杂波中。故如何抑制或消除这些杂波以检测出微弱的目标回波信号,也是实现相干检测的关键。杂波抑制方法有利用地物遮挡、天线设计、空域置零、频域滤波、时域干扰相消等[58-59]。
5.3 微弱目标检测
非合作定位中,采用的外辐射源一般为第三方民用、商用信号,发射天线一般是全向天线,方向性不集中、发射增益小,故目标回波信号到达参考信道时不仅伴随着其他杂波的干扰,且与直达波和多径信号相比信号十分微弱。因此,对微弱目标回波信号的检测和信噪比提升是十分重要的。微弱目标检测技术一般需要做长时间的相干积累,再采用互相关接收方式来提高检测所需的信杂比[57]。
6 无源定位发展趋势
6.1 定位精度和定位速度提升
采用数字式接收机、大规模天线阵列技术及数据融合技术,可实现对外辐射源信号高精准接收和识别,从而达到定位精度和定位速度的大幅提升。因此,采用混合定位方法提高精度和速度是一种发展趋势。除此之外,许多定位算法是基于接收参数在高斯分布白噪声的假设下开展设计研究的,对于实际定位情况,需要考虑许多非高斯分布的情况。
6.2 多目标高变速移动条件下的实时定位
针对单目标的无源定位技术研究成果已较为丰富,然而对于多目标的定位、追踪、识别,特别是大规模高速运动目标的无源定位还不是非常完善。目前的多站无源定位技术和单站无源定位技术大多都是对匀速运动目标或者固定目标的定位处理,对于高速、变速运动目标的定位处理还是比较少见。
6.3 外辐射源选择
对于电视广播、移动通信等非合作信号,因熟知调制方式、工作频段,所以比较容易测知信号的基本参数及变化规律。对于一些未知外辐射源,尤其在没有电视广播等信号的地区,实现定位较困难。因此,应充分扩大信号的频段,并利用各种可能的信号作为外辐射源。
6.4 多平台组网协同定位
在网络中心战的环境下,利用网络技术和数据融合技术,将不同无源定位平台间的数据、有源平台与无源平台间的数据进行融合,以提高定位系统的生存能力、获得更高精度的目标状态。其中,网络结构设计、通信表现性能、数据融合也是重要研究方向。
7 结 束 语
无源定位技术虽然起步较晚,但广泛应用于各行各业并发挥着重要作用,受到越来越多关注,近几年发展十分迅速。然而,实现成熟完善的无源定位系统仍十分困难,现阶段的无源定位技术亟待解决的问题还有很多,如精密仪器参数测量、实时多目标定位追踪、运动轨迹预测形成、大容量信号处理、目标和模式识别等。未来随着相关学科革新,人工智能、新一代通信组网等技术的快速发展将推动无源定位技术不断进步,并广泛应用于国民经济和国防安全多个领域。
参考文献:
[1] 杨一鸣. 无源定位技术综述[J]. 科技风,2014(7):71-73.
Yang Yiming. An Overview of Passive Localization Technology[J]. Technology Wind,2014(7): 71-73. (in Chinese)
[2] 王本才,张国毅,侯慧群. 无源定位技术研究[J]. 舰船电子对抗,2006,29(6):20-26.
Wang Bencai,Zhang Guoyi,Hou Huiqun. Study of Passive Location Technologies[J]. Shipboard Electronic Countermeasure,2006,29(6): 20-26. (in Chinese)
[3] Feng C,Au W S A,Valaee S,et al. Received-Signal-Strength-Based Indoor Positioning Using Compressive Sensing[J]. IEEE Transactions on Mobile Computing,2012,11(12): 1983-1993.
[4] Zhao C,Zhao Y J. One Recurrent Neural Networks Solution for Passive Localization[J]. Neural Processing Letters,2019,49(2): 787-796.
[5] Olsen K E,Asen W. Bridging the Gap between Civilian and Military Passive Radar[J]. IEEE Aerospace and Electronic Systems Magazine,2017,32(2): 4-12.
[6] 郁春來,张元发,万方. 无源定位技术体制及装备的现状与发展趋势[J]. 空军雷达学院学报,2012,26(2):79-85.
Yu Chunlai,Zhang Yuanfa,Wan Fang. Actuality and Development Trend of Passive Location Technical System and Equipment[J]. Journal of Air Force Radar Academy,2012,26(2): 79-85. (in Chinese)
[7] 杨建华. 雷达无源定位技术的发展与战术应用[J]. 中国电子科学研究院学报,2009,4(6): 601-605.
Yang Jianhua. The Latest Development of Radar Passive Localization Technology and Its Applications[J]. Journal of China Academy of Electronics and Information Technology,2009,4(6):601-605. (in Chinese)
[8] 景桐,田威,黄高明.基于到达时间和多普勒频率的海战场无源跟踪模型[J].电光与控制,2019,26(7):29-35.
Jing Tong,Tian Wei,Huang Gaoming. A Passive Tracking Model Based on Time of Arrival and Doppler Frequency in Naval Battlefield[J]. Electronics Optics & Control,2019,26(7): 29-35. (in Chinese)
[9] 吴小强.高精度机动目标快速无源定位装备技术发展综述[J].舰船电子工程,2011,31(11):11-14.
Wu Xiaoqiang. An Overview of Precision Moving Target Celerity Passive Location Development Technology of Foreign Army[J]. Ship Electronic Engineering,2011,31(11): 11-14.(in Chinese)
[10] 武世勇,齐和平,王学文,等.浅谈美军网络信息装备体系[J].火力与指挥控制,2019,44(2):6-10.
Wu Shiyong,Qi Heping,Wang Xuewen,et al. An Overview of the US Armys Network Information Equipment Architectural[J]. Fire Control & Command Control,2019,44(2): 6-10. (in Chinese)
[11] 杨跃轮.机载无源探测定位新技术综述[J].舰船电子对抗,2010,33(3):14-17.
Yang Yuelun. Summary of New Airborne Passive Detection and Location Technologies[J]. Shipboard Electronic Countermeasure,2010,33(3): 14-17.(in Chinese)
[12] Shi X F,Yang C Q,Xie W G,et al. Anti-Drone System with Multiple Surveillance Technologies: Architecture,Implementation,and Challenges[J]. IEEE Communications Magazine,2018,56(4): 68-74.
[13] Ding G R,Wu Q H,Zhang L Y,et al. An Amateur Drone Surveillance System Based on the Cognitive Internet of Things[J]. IEEE Communications Magazine,2018,56(1): 29-35.
[14] Solomitckii D,Gapeyenko M,Semkin V,et al. Technologies for Efficient Amateur Drone Detection in 5G Millimeter-Wave Cellular Infrastructure[J]. IEEE Communications Magazine,2018,56(1): 43-50.
[15] Haniz A,Tran G K,Saito K,et al. A Novel Phase-Difference Fingerprinting Technique for Localization of Unknown Emitters[J]. IEEE Transactions on Vehicular Technology,2017,66(9): 8445-8457.
[16] Yu T,Haniz A,Sano K,et al. A Guide of Fingerprint Based Radio Emitter Localization Using Multiple Sensors[J]. IEICE Transactions on Communications,2018(10): 2104-2119.
[17] 馬俊,刘燕. 浅析伪基站原理及查找方法[J]. 中国无线电,2015(6):60-62.
Ma Jun,Liu Yan. A Brief Analysis of Pseudo Base Station Theory and Detection Method [J]. China Radio,2015 (6): 60-62. (in Chinese)
[18] Li Z H,Wang W W,Wilson C,et al. FBS-Radar: Uncovering Fake Base Stations at Scale in the Wild[C]∥The 24th Network and Distributed System Security Symposium (NDSS), 2017.
[19] 张明臣,刘建民,田永超. 4G伪基站干扰评估、定位及规避优化方案[J].移动通信,2019,43(4):89-92.
Zhang Mingchen,Liu Jianmin,Tian Yongchao. Optimization Scheme on Interference Evaluation,Localization and Avoidance for 4G LTE Pseudo Base Stations[J]. Mobile Communications,2019,43(4): 89-92.(in Chinese)
[20] 朱擁建,刘远,石林艳,等. 非合作侦察定位系统的关键技术[J].太赫兹科学与电子信息学报,2018,16(3): 452-457.
Zhu Yongjian,Liu Yuan,Shi Liyan,et al. Key Technology of Non-Cooperative Reconnaissance and Positioning System[J]. Journal of Terahertz Science and Electronic Information Technology,2018,16(3): 452-457.(in Chinese)
[21] Edrich M,Schroeder A,Meyer F. Design and Performance Evaluation of a Mature FM/DAB/DVB-T Multi-Illuminator Passive Radar System[J]. IET Radar,Sonar and Navigation,2014,8(2): 114-122.
[22] Gromek D,Kulpa K,Samczynski P. Experimental Results of Passive SAR Imaging Using DVB-T Illuminators of Opportunity[J]. IEEE Geoscience and Remote Sensing Letters,2016,13(8): 1124-1128.
[23] OHagan D W,Griffiths H D,Ummenhofer S M,et al. Elevation Pattern Analysis of Common Passive Bistatic Radar Illuminators of Opportunity[J]. IEEE Transactions on Aerospace and Electronic Systems,2017,53(6): 3008-3019.
[24] Daniel L,Hristov S,Lyu X Y,et al. Design and Validation of a Passive Radar Concept for Ship Detection Using Communication Satellite Signals[J]. IEEE Transactions on Aerospace and Electronic Systems,2017,53(6): 3115-3134.
[25] Paine S,OHagan D W,Inggs M,et al. Evaluating the Perfor-mance of FM-Based PCL Radar in the Presence of Jamming[J].IEEE Transactions on Aerospace and Electronic Systems,2019,55(2): 631-643.
[26] Santi F,Pieralice F,Pastina D. Joint Detection and Localization of Vessels at Sea with a GNSS-Based Multistatic Radar[J]. IEEE Transactions on Geoscience and Remote Sensing,2019,57(8): 5894-5913.
[27] Silva M G M,Torres-Sospedra J,Huerta J,et al. A Meta-Review of Indoor Positioning Systems[J]. Sensors,2019,19(20): 4507.
[28] Zou D Y,Sun H,Chen Y,et al. A Research on Positioning Technology Based on Internet of Things[J]. Applied Mechanics and Materials,2013,303/304/305/306: 926-929.
[29] 王绍丹,王宜怀,刘锴.基于射频识别和无线传感网融合技术的仓储定位方法研究[J].计算机应用研究,2018,35(1):195-198.
Wang Shaodan,Wang Yihuai,Liu Kai. Research on Warehouse Localization Method Based on Integration of RFID and WSN[J]. Application Research of Computers,2018,35(1): 195-198.(in Chinese)
[30] Qin H,Peng Y,Zhang W S. Vehicles on RFID: Error-Cognitive Vehicle Localization in GPS-Less Environments[J]. IEEE Tran-sactions on Vehicular Technology,2017,66(11): 9943-9957.
[31] Minhas U I,Naqvi I H,Qaisar S,et al. A WSN for Monitoring and Event Reporting in Underground Mine Environments[J]. IEEE Systems Journal,2018,12(1): 485-496.
[32] 王烁,张其林,王磊,等. 无源定位技术在昆明地区三维闪电探测网布站中的应用[J]. 电瓷避雷器,2018(5):126-131.
Wang Shuo,Zhang Qilin,Wang Lei,et al. Application of Passive Location Technology in 3D Lightning Detection Mesh Station in Kunming Area[J]. Insulators and Surge Arresters,2018(5): 126-131. (in Chinese)
[33] Sadowski S,Spachos P. RSSI-Based Indoor Localization with the Internet of Things[J]. IEEE Access,2018,6: 30149-30161.
[34] Yassin A,Nasser Y,Awad M,et al. Recent Advances in Indoor Localization: A Survey on Theoretical Approaches and Applications[J]. IEEE Communications Surveys and Tutorials,2017,19(2): 1327-1346.
[35] He S N,Chan S H G. Wi-Fi Fingerprint-Based Indoor Positioning: Recent Advances and Comparisons[J]. IEEE Communications Surveys and Tutorials,2016,18(1): 466-490.
[36] Vo Q D,De P. A Survey of Fingerprint-Based Outdoor Localization[J]. IEEE Communications Surveys and Tutorials,2016,18(1): 491-506.
[37] Laoudias C,Moreira A,Kim S,et al. A Survey of Enabling Technologies for Network Localization,Tracking,and Navigation[J]. IEEE Communications Surveys and Tutorials,2018,20(4): 3607-3644.
[38] 賀杏. 固定单站无源定位方法研究[D]. 西安:西安电子科技大学,2018.
He Xing. Research on the Method of Fixed Single Station Passive Location[D]. Xian: Xidian University,2018. (in Chinese)
[39] 钟建林,刘方,石章松,等. 基于测向交叉定位的空舰导弹协同攻击方法[J]. 航空兵器,2019,26(4):47-53.
Zhong Jianlin,Liu Fang,Shi Zhangsong,et al. Coordinated Attack Method for Air-to-Ship Missiles Based on Beam-Crossing Locating[J]. Aero Weaponry,2019,26(4): 47-53. (in Chinese)
[40] Guvenc I,Chong C C. A Survey on TOA Based Wireless Localization and NLOS Mitigation Techniques[J]. IEEE Communications Surveys and Tutorials,2009,11(3): 107-124.
[41] Subedi S,Zhang Y D,Amin M G,et al. Group Sparsity Based Multi-Target Tracking in Passive Multi-Static Radar Systems Using Doppler-Only Measurements[J]. IEEE Transactions on Signal Processing,2016,64(14): 3619-3634.
[42] Zhou T Y,Cheng Y,Lian B W,et al. Research on High-Precision Passive Localization Based on Phase Difference Changing Rate[J]. Concurrency and Computation: Practice and Experience,2019,31(23): e4492.1-e4492.11.
[43] Mittermaier T J,Siart U,Eibert T F. Accuracy Analysis of Short-Range Doppler Shift Target Localization Using a Multi-Sensor Platform[C]∥2016 IEEE Radar Conference,2016.
[44] Jia T Y,Ho K C,Wang H Y,et al. Effect of Sensor Motion on Time Delay and Doppler Shift Localization: Analysis and Solution[J]. IEEE Transactions on Signal Processing,2019,67(22): 5881-5895.
[45] Coluccia A,Fascista A. On the Hybrid TOA/RSS Range Estimation in Wireless Sensor Networks[J]. IEEE Transactions on Wireless Communications,2018,17(1): 361-371.
[46] Tomic S,Beko M,Tuba M,et al. Target Localization in NLOS Environments Using RSS and TOA Measurements[J]. IEEE Wireless Communications Letters,2018,7(6): 1062-1065.
[47] Kumarasiri R,Alshamaileh K,Tran N H,et al. An Improved Hybrid RSS/TDOA Wireless Sensors Localization Technique Utilizing Wi-Fi Networks[J]. Mobile Networks and Applications,2016,21(2): 286-295.
[48] Zhang R,Xia W W,Yan F,et al. A Single-Site Positioning Method Based on TOA and DOA Estimation Using Virtual Stations in NLOS Environment[J]. China Communications,2019,16(2): 146-159.
[49] Wang Y,Ho K C. Unified Near-Field and Far-Field Localization for AOA and Hybrid AOA-TDOA Positionings[J]. IEEE Transactions on Wireless Communications,2018,17(2): 1242-1254.
[50] Zou Y B,Liu H P,Wan Q. An Iterative Method for Moving Target Localization Using TDOA and FDOA Measurements[J]. IEEE Access,2018,6: 2746-2754.
[51] Hu D X,Huang Z,Zhang S Y,et al. Joint TDOA,FDOA and Differential Doppler Rate Estimation: Method and Its Performance Analysis[J]. Chinese Journal of Aeronautics,2018,31(1): 137-147.
[52]
應涛,黄高明,左炜,等. 非合作无源探测技术研究进展与发展趋势[J]. 高技术通讯,2015,25(5): 481-492.
Ying Tao,Huang Gaoming,Zuo Wei,et al. Development and Prospect of Passive Detection Technology Based on Non-Cooperative Illuminators[J].Chinese High Technology Letters,2015,25(5): 481-492.(in Chinese)
[53] 宋杰,何友,蔡复青,等. 基于非合作雷达辐射源的无源雷达技术综述[J]. 系统工程与电子技术,2009,31(9):2151-2156.
Song Jie,He You,Cai Fuqing,et al. Overview of Passive Radar Technology Based on Non-Cooperative Radar Illuminator[J]. Systems Engineering and Electronics,2009,31(9): 2151-2156. (in Chinese)
[54] 李红伟. 外辐射源雷达目标定位与跟踪方法研究[D]. 西安:西安电子科技大学,2012.
Li Hongwei. Studies on Target Localization and Tracking in Passive Coherent Location Radar[D]. Xian: Xidian University,2012. (in Chinese)
[55] Zhang X,Li H,Himed B,et al. Multistatic Detection for Passive Radar with Direct-Path Interference[J]. IEEE Transactions on Aerospace and Electronic Systems,2017,53(2): 915-925.
[56] Chabriel G,Barrere J. Adaptive Target Detection Techniques for OFDM-Based Passive Radar Exploiting Spatial Diversity[J]. IEEE Transactions on Signal Processing,2017,65(22): 5873-5884.
[57] Lü X Y,Wang J,Wang J. Robust Direction of Arrival Estimate Method in FM-Based Passive Bistatic Radar with a Four-Element Adcock Antenna Array[J]. IET Radar,Sonar and Navigation,2015,9(4): 392-400.
[58] Liu Y Q,Yi J X,Wan X R,et al. Evaluation of Clutter Suppression in CP-OFDM-Based Passive Radar[J]. IEEE Sensors Journal,2019,19(14): 5572-5586.
[59] 吳昊,宁勇,薄超. 外辐射源探测系统关键技术研究[J]. 航天电子对抗,2017,33(4):54-56.
Wu Hao,Ning Yong,Bo Chao. Research on Key Technologies of Passive Coherent Location System[J]. Aerospace Electronic Warfare,2017,33(4): 54-56. (in Chinese)
Development and Application Analysis of Passive Localization
Li Kang1,Ding Guoru1*,Li Jinghua1,Qian Huiming2,Liu Ningsong1
(1. Army Engineering University,Nanjing 210007,China; 2. Unit 32369 of PLA,Beijing 100040,China)
Abstract: Passive localization is realized by receiving the intended and unintended radiation,or reflection signals from the target. The locating system doesnt emit electromagnetic signals to the outside,so it has the characteristics of good concealment,long operating distance and strong survivability,which has been widely used in civil and national defense fields. In this paper,the connotation and characteristics of passive localization,typical applications in military and civil fields,key performance indicators,key technologies of passive localization and passive localization based on external radiation sources are discussed,and the future development trend of passive localization technology is prospected.
Key words: passive localization;non-cooperative localization;illegal drone;illegal broadcast
收稿日期:2020-02-28
基金项目:国家自然科学基金项目(U20B2038,61931011,61871398);江苏省自然科学基金杰出青年项目(BK20190030)
作者简介:李康(1996-),男,青海西宁人,硕士研究生,研究方向为无源定位。
通讯作者: 丁国如(1986-),男,河南新乡人,教授,博士,研究方向为电磁态势感知、群体智能。
