跨越水平障碍物时的步态特征
2021-07-29张峻霞邵洋洋王喆豪杨芳
张峻霞,邵洋洋,王喆豪,杨芳
1.天津科技大学机械工程学院,天津市 300222;2.天津市轻工与食品工程机械装备集成设计与在线监控重点实验室,天津市 300222
跨越障碍是造成跌倒最主要的原因之一。美国65岁以上成年人中,近1/3 每年都会跌倒,每年跌倒损伤治疗费用约310 亿美元[1]。跌倒后躺在地上超过1 h的老年人,事故后6 个月内死亡的可能性达50%[2]。此外,跌倒对他们的情绪、身体和经济都有重大影响[3]。在跨障过程中下肢的运动学和动力学参数引起广泛关注和研究。
Choi 等[4]将日常生活中出现的障碍物归为4 类:具有倾斜角度的障碍物;水平方向上具有一定宽度的障碍物,如沟壑;台阶型障碍物;有一定高度的障碍物。现在对斜坡类[5-7]、台阶型[8-10]和高度障碍物[11-15]对人体影响的研究较多,但跨越类似于沟壑的障碍物研究较少。跨越水平方向障碍物导致下肢跨越运动学、动力学和生物力学变化,存在瞬间失稳跌倒的潜在风险。
正常人下肢在行走过程中有不对称性[16],不对称性会增加老年人跌倒的风险[17];偏侧性是引发步态不对称的原因之一,受试者个体常表现出优势侧偏好[16],如右侧优势者更倾向于向右侧偏移。优势肢体和非优势肢体之间的时空步态参数[17]、动力学[18-22]和运动参数[23]存在统计学差异,下肢不对称性或偏侧性是影响损伤发生率的因素[24]。
本研究探索水平跨障中影响跌倒风险的因素障碍物和跨越肢体,以期优化跨障策略,降低跌倒风险。
1 对象与方法
1.1 研究对象
2019 年9 月,从本院学生中招募健康男性受试者15 例,身高(1752±45.8)mm,体质量(72±11.3)kg。所有受试者均为右利者,在过去12个月中未经历过跌倒或肌肉骨骼紊乱,未出现任何可能影响其步态和认知功能的病症。
本研究经天津科技大学学术委员会审查通过,所有受试者在参与前均知悉试验方案,并签署知情同意书。
1.2 方法
本研究包含两个自变量:水平障碍物宽度和跨越肢体的选择(非优势/优势)。
障碍物宽度设定参照文献[25]并结合常见水平方向障碍物设定,如下水道宽40 cm,井盖宽60 cm,公路隔离带宽65 cm,汽车减速带宽35 cm。本研究水平障碍物宽度设为0 cm(对照)、45 cm、55 cm和65 cm。
因变量为步态参数,其定义及缩写见表1。

表1 步态参数定义
用4 块AMTI 力台搭建实验路径,每块力台面积60×40 cm,第2 和第3 块力台间隔一定距离,代表水平障碍物宽度。用Vicon 系统跟踪受试者身体上16 个反射标记点(分别位于双侧髂前上棘、髂后上棘、大腿中部、膝、小腿中部、脚趾、踝和足跟外侧)的运动[26]。
受试者了解试验过程,热身训练5 min,让受试者熟悉测试环境。进行相关人体参数测量,固定反射标记物。每例受试者共测试80 次,具体方案见表2。测试期间为受试者提供充足的休息,防止产生疲劳。

表2 试验方案
1.3 数据处理
采用MATLAB 2014b 软件编制程序处理数据。提取一个步态周期,包括跨越肢体通过障碍的半步(跨越步)和跟随肢体通过障碍的半步(跟随步)。
采用MINITAB 18 进行数据分析。步态参数符合正态分布,以()表示。自变量对步态参数的影响采用单因素方差分析,有显著性差异的变量采用图基事后检验。显著性水平α=0.05。
2 结果
2.1 障碍物因素
相比于无障碍物,跨越水平障碍物时,步速、CSl、CSt、步态周期、步幅、步长、TCl、TCt均显著增高(P<0.001),步宽、TOD、HOD 明显降低(P<0.01)。随着障碍物宽度增加,步速、CSl、CSt、步幅、步长、TCt增大,HOD 减小。障碍物宽度对步态周期、步宽、TCl、TOD无显著影响。见表3。
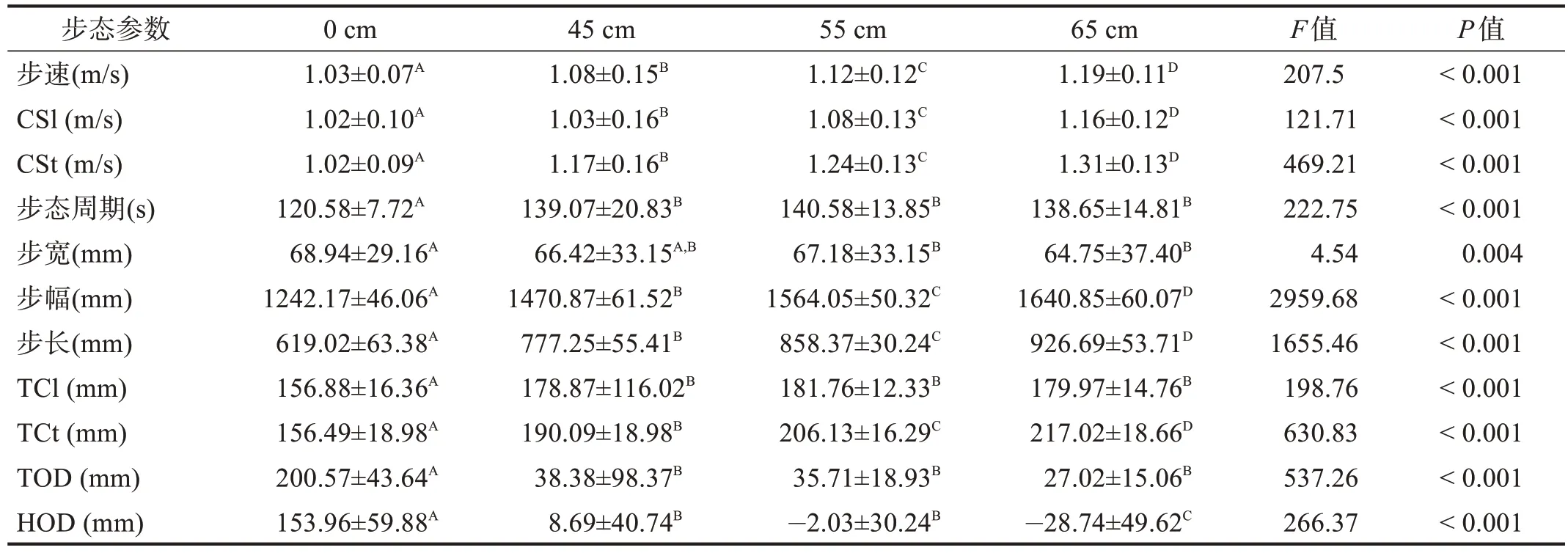
表3 跨越不同宽度水平障碍物时步态参数比较
2.2 跨越肢体因素
与非优势肢体相比,使用优势肢体作为跨障肢体,CSl、步宽、步长、TCt、HOD 显著减小(P<0.001),而CSt和TCl明显增加(P<0.01)。使用优势或非优势肢体作为跨越肢体对步速无显著影响(P>0.01)。见表4。

表4 跨障肢体为非优势或优势肢体的步态参数比较
3 讨论
本研究显示,跌倒风险会随着障碍物宽度的增加而逐渐增大;使用非优势肢体作为跨越肢体会降低跌倒风险。
成功跨障需要足够的脚趾高度,以防跌倒[27]。TCt 随着障碍物宽度的增加而增大,原因有二。当跟随肢体跨越障碍物时,身体重心向对侧肢体移动,跌倒发生的可能性降低;随着障碍物宽度增大,跟随肢体向上移动的距离加大,重心更易转移到对侧肢体,更易维持身体的平衡。由于缺乏视觉对跟随肢体运动的指导。Patla 等[28]指出,障碍物越小,TCt 越小,这是由于跟随肢体运动缺乏视觉输入,以及足趾离地后用于微调跟随肢体轨迹的时间较短。
HOD 和TOD决定跨障时足部位置[29]。HOD、TOD越小,足部越靠近障碍物,越容易发生跌倒。本研究显示,虽然步长随障碍物宽度增加而增大,TOD在不同宽度间不存在显著性差异,HOD却随着障碍物的宽度增加而减小,表明随着跨障难度增加,发生跌倒事件的可能性增加[29]。
跌倒风险随着障碍物宽度的增加而增加。首先,跨越更宽的障碍物时,步速更快,而速度增加会增大跌倒风险[30-32]。其次,为提高跨障成功率,跨越更宽障碍物时要增加步幅、步长、TCt。最后,HOD 减小也证明在跨越更宽障碍时,安全性降低。
在跨越水平障碍物时,以优势肢体作为跨越肢体能提供更精确的运动控制[33-36];以非优势肢体作为跨越肢体时,优势肢体能够提供稳定与支撑。选择优势肢体还是非优势肢体作为跨越肢体更有利于水平跨障尚未见研究。
根据已有研究知道,较慢的CS、更高的TC 和更大的步宽可降低跌倒风险[28,30,37],较短的步长和HOD会增加跌倒风险[29]。本研究显示,当优势肢体作为跨越肢体时,跨越步CSl 较慢,TCl 较大;非优势肢体作为跨越肢体时,跟随步CSt 较慢,TCt 较大,步宽、步长、HOD也较大。青年人跨障期间,跟随肢体诱发跌倒的危险高于跨越肢体[38-40],跟随步态对跌倒的影响更大,因此,使用非优势肢体作为跨越肢体,优势肢体作为跟随肢体时,跌倒的风险更低。
本研究还有一些有趣的发现。测试过程中,3 例受试者共20次试验的步宽出现负值,即跨越肢体向身体对侧偏移,且每次出现的位置不同,这可能是由于注意力不集中,导致身体失稳所致。值得进一步观察。另外,HOD 和TOD 也出现了负值,表明跨越肢体未能成功跨障,“掉入”障碍物内。这可能与实验环境的设置有关:水平障碍物是虚拟的,受试者并不担心因踏空而导致失稳,甚至为了降低跨障难度,故意踩踏边缘而不选择增加跨越步的步长。
跌倒具有间接导致残疾甚至死亡的风险[41]。本研究通过对跨越水平障碍条件下的步态特征分析发现:随着障碍物宽度增加,跨越者跨越速度更快,足到障碍物的距离更小,导致跌倒风险增加;加大步幅、步长和TCt 可以降低跌倒风险;使用非优势侧肢体作为跨越肢体,优势肢体作为跟随肢体,跌倒的风险更低,是更佳的跨障策略。
本研究结果可作为进一步研究老年人和下肢运动障碍人群水平跨障时步态变化的基线数据[42-43],也可为下肢外骨骼机器人实现水平跨障提供理论支撑。在无障碍设计方面,本研究选择了具有代表性的三种宽度障碍物,其结果可为合理设置水平方向物体间距和无障碍设计提供数据支撑。
本研究存在以下局限。生活中所遇路况复杂,应增加细化不同宽度障碍;未考虑上肢情况,应结合上肢运动,进一步分析跨障时的步态。
利益冲突声明:所有作者声明不存在利益冲突。