城市轨道交通全自动洗车方案研究
2021-05-13秦小虎孙晓光
秦小虎,孙晓光
(1. 重庆市轨道交通(集团)有限公司,重庆 401120;2. 通号城市轨道交通技术有限公司,北京 100070)
1 概述
随着城市快速发展,人们的出行需求急剧增加,为提高城市轨道交通系统的运行效率,全自动运行控制系统应运而生,且将被广泛使用。全自动停车场作为全自动运行控制系统的重要组成部分之一,主要完成全自动洗车的功能。全自动洗车能够大幅提高洗车效率,降低运营维护人员的工作强度,充分体现了全自动停车场的自动化程度。为实现全自动洗车的功能,信号系统需要增加与洗车机的接口功能和逻辑关系。本文主要对洗车过程中各个相关系统的信息交互、接口方式、通信流程及洗车机状态等进行研究,给出城市轨道交通全自动洗车方案。
2 接口方案设计
全自动运行控制系统中,系统根据洗车作业计划给出提示,在人工进行确认后自动触发至洗车线的进路,列车在全自动驾驶模式(FAM)下,洗车作业由车载VOBC 控制完成,车载VOBC 通过联锁系统向洗车机发送洗车请求,收到洗车机的确认回复后,车载VOBC 向车辆发送洗车模式及牵引命令,待列车就位后开始洗车作业;在洗车作业的过程中,车载VOBC 控制列车定点停车及折返换端,完成列车的清洗;洗车完成后,车载VOBC 控制列车出清洗车库停车点,列车停稳后退出洗车模式,系统再根据洗车作业计划自动触发回库进路。
由此可见,全自动运行控制系统的全自动洗车功能,由信号系统与洗车机间的接口配合实现,因此,首先对信号系统与洗车机间的接口方案进行详细分析与设计。
2.1 洗车机、联锁系统、车载VOBC间信息交互
全自动洗车过程由车载VOBC 控制。联锁系统负责传送车载VOBC 与洗车机之间的交互信息,本身不直接参与洗车过程的相关逻辑。
联锁系统根据车载VOBC 发送的状态及命令,向洗车机发送洗车请求、暂停、头洗车停稳状态、暂停、尾洗车停稳状态、列车通过洗车区请求等信息;同时,采集来自洗车机的洗车机就绪、洗车请求确认、头洗车允许移动命令、尾洗车允许移动命令、紧急停车命令、返回确认状态信息以及洗车机故障信息等,转发给车载VOBC。其具体交互过程如图1 所示。
2.2 联锁系统与洗车机接口方式
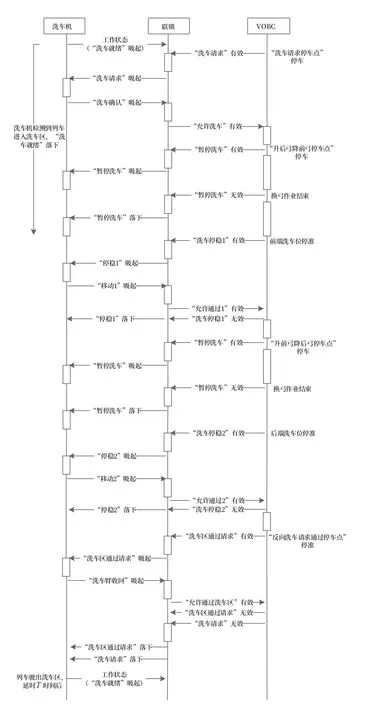
图1 洗车机、联锁系统、车载VOBC间信息交互Fig.1 Information interaction among car washer, interlocking system and onboard VOBC
全自动洗车机位于洗车库内,通过继电接口与联锁系统连接,进行控制信息和状态信息的交互。继电电路为双断电路,通过安全型输入/输出板对安全继电器进行状态采集和命令驱动。联锁系统将洗车请求、暂停洗车、停稳、通过洗车机请求等信息发送给洗车机;洗车机将洗车机就绪、洗车请求确认、允许移动、洗车机故障、返回确认状态信息发送给联锁系统。具体交互信息如表1 所示。

表1 联锁系统与洗车机接口Tab.1 Interface between interlocking system and car washer
3 洗车过程中VOBC-CI通信流程
在确定信号系统与洗车机的接口方案后,为实现全自动洗车功能,需根据正常洗车流程,设计在洗车过程中,VOBC 与CI 需遵循的相应通信流程,以此来控制列车状态和洗车机以实现自动洗车功能。
洗车机处于自动模式是全自动洗车的前提,正常的洗车流程为:VOBC 发送“洗车请求”,洗车机收到后回复“请求确认”,之后启动自动洗车功能。根据此流程,VOBC 与CI 的具体通信流程如下。
VOBC 按照CBTC 互联互通原则,在具备“CI通信轨道区段”属性的轨道区段前配置距离内,开始 与CI 建 立 通 信。VOBC 发 送VOBC-CI 心 跳帧、VOBC-CI 控制信息帧的条件均与CBTC 互联互通系统相同。VOBC 发送VOBC-CI 控制信息帧时,应同时发送VOBC-CI 全自动运行交互信息帧。在列车停稳前,VOBC-CI 全自动运行交互信息帧中“自动洗车”部分的全部信息均为默认值(下称“VOBC 全自动洗车默认帧”)。
CI 与VOBC 建立通信后,发送CI-VOBC 心跳帧、CI-VOBC 状态信息帧的条件均与CBTC 互联互通系统相同。CI 发送CI-VOBC 状态信息帧时,应同时发送CI-VOBC 全自动运行交互信息帧。CI 收到VOBC 发送的VOBC 全自动洗车默认帧后,发送的CI-VOBC 全自动运行交互信息帧中的“自动洗车”部分的全部信息均为默认值(下称“CI 全自动洗车默认帧”)。
VOBC 控车在“洗车请求停车点”停车,停稳后,VOBC 向CI 发送的VOBC-CI 全自动运行交互信息帧中的“洗车请求”字段取值应变为“请求有效”(下称“洗车请求有效”),其他字段应均为默认值。
CI 收到VOBC 发送的“洗车请求”信息后,向洗车机转发洗车请求。
CI 收到VOBC 发送的“洗车请求有效”信息时,应根据收到洗车机的“洗车请求确认”信息判断向VOBC 发送的CI-VOBC 全自动运行交互信息帧中的“洗车请求确认”字段:若洗车机允许洗车,则该字段取值应为“允许洗车”(下称“允许洗车”);若洗车机不允许洗车,则该字段取值应为“不允许洗车”(下称“不允许洗车”)。
VOBC 发送“洗车请求有效”信息,且未处于洗车工况时,若收到CI 发送的“允许洗车”信息,应进入洗车工况并通知车辆TCMS,允许列车前行(洗车过程中由车辆控制列车前行,VOBC 控制列车停车)。
VOBC 处于洗车工况时,若收到CI 发送的“不允许洗车”信息,应实施紧急制动,退出洗车工况,并停止发送洗车请求。
VOBC 应控制列车在“升后弓降前弓停车点”/“升前弓降后弓停车点”停准,并禁止列车继续前行。列车在“升后弓降前弓停车点”/“升前弓降后弓停车点”停稳时,VOBC 应通知TCMS 进行该停车点规定的换弓动作,换弓结束后,VOBC 应允许列车继续前行。若该停车点同时具备“洗车暂停停车点”属性,则列车停稳时,VOBC 向CI 发送的VOBC-CI 全自动运行交互信息帧中的“暂停洗车”字段取值应变为“请求有效”,换弓结束后,“暂停洗车”字段取值应变为“请求无效”。
CI 应将收到的VOBC-CI 全自动运行交互信息帧中的“暂停洗车”信息转发给洗车机。
VOBC 应控制列车在“前端洗位停车点”/“后端洗位停车点”停准,并禁止列车继续前行。列车在“前端洗位停车点”/“后端洗位停车点”停稳时,VOBC 向CI 发送的VOBC-CI 全自动运行交互信息帧中的“洗车停稳1”/“洗车停稳2”字段取值应变为“请求有效”。
CI 应将收到的VOBC-CI 全自动运行交互信息帧中的“洗车停稳1”/“洗车停稳2”信息转发给洗车机。
CI 收到VOBC 发送的“洗车请求有效”信息时,应根据洗车机发送的前端洗车结束/后端洗车结束信息判断向VOBC 发送的CI-VOBC 全自动运行交互帧中的“允许通过1”/“允许通过2”字段取值:若前端洗车/后端洗车结束,则“允许通过1”/“允许通过2”字段取值应为“允许通过”,若前端洗车/后端洗车未结束,则“允许通过1”/“允许通过2”字段取值应为“禁止通过”。
VOBC 判断列车在“前端洗位停车点”/“后端洗位停车点”停准,且向CI 发送“洗车停稳1”/“洗车停稳2”字段取值为“请求有效”时,若收到CI 发送的“允许通过1”/“允许通过2” 字段取值为“允许通过”,则向CI 发送的 “洗车停稳1”/“洗车停稳2”字段取值应变为“请求无效”,并允许列车继续前行。
VOBC 应根据ATS 发送的折返命令,控制列车在“折返停车点”停车,列车停稳后,退出洗车工况并通知TCMS,之后进行折返换端。换端后,新首端VOBC 应继续向 CI 发送洗车请求有效信息。换端完成后,VOBC 控制列车前行。
VOBC 应控制列车在“洗车请求通过停车点”停准,并禁止列车继续前行。列车在“洗车请求通过停车点”停稳后,VOBC 向CI 发送的VOBC-CI全自动运行交互信息帧中的“洗车区通过请求”字段取值应变为“请求有效”。CI 应将收到的VOBCCI 全自动运行交互信息帧中的“洗车区通过请求”信息转发给洗车机。
CI 收到VOBC 发送的“洗车请求有效”信息时,应根据洗车机发送的允许通过信息判断向VOBC 发送的CI-VOBC 全自动运行交互帧中的“允许通过洗车机”字段取值:若洗车机允许通过,则“允许通过洗车机”字段取值应为“洗车臂已收回”,若洗车机不允许通过,则“允许通过洗车机”字段取值应为“洗车臂未收回”。
VOBC 判断列车在“洗车请求通过停车点”停准,且向CI 发送“洗车区通过请求”字段取值为“请求有效”时,若收到CI 发送的“允许通过洗车机” 字段取值为“洗车臂已收回”,则向CI 发送的“洗车区通过请求”字段取值应变为“请求无效”,“洗车请求”字段取值变为“请求无效”,并控制列车继续前行。
VOBC 发送“洗车请求有效”信息时,若判断列车安全包络有重叠的轨道区段均无“洗车停车区域”属性,则应退出洗车工况,向CI 发送的“洗车请求”字段取值变为“请求无效”。
CI 收到VOBC 发送的“洗车请求有效”信息时,应根据洗车机发送的故障状态信息及急停按钮状态判断向VOBC 发送的CI-VOBC 全自动运行交互帧中的“洗车机故障”字段取值:若洗车机无故障且急停按钮未按下,则“洗车机故障”字段取值应为“洗车机无故障”,若洗车机故障或急停按钮按下,则“洗车机故障”字段取值应为“洗车机故障”。
VOBC 收到CI 发送的“洗车机故障”字段取值为“洗车机故障”时,若处于洗车工况,则应退出洗车工况,输出紧急制动停车,并通知ATS 报警。洗车工况下,若VOBC 判断与CI 通信断开,则应退出洗车工况,输出紧急制动停车,并通知ATS 报警。
洗车工况下,若VOBC 输出紧急制动,则应退出洗车工况,输出紧急制动停车,并通知ATS 报警。
4 洗车机状态跳转
在洗车过程中,联锁系统对车载VOBC 与洗车机之间的交互信息进行传送,控制洗车机动作完成自动洗车功能。根据通信流程中CI 传送过来的通信指令,结合洗车机当前状态,洗车机进行状态跳转。具体状态跳转如图2 所示。
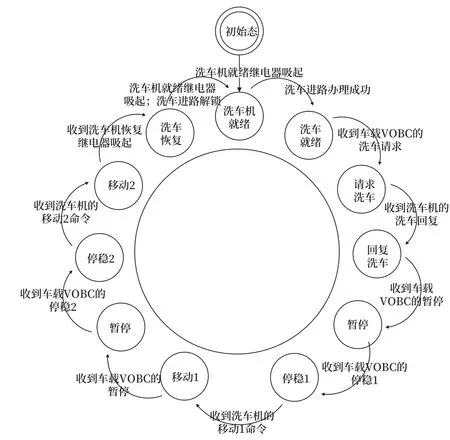
图2 洗车机状态跳转图Fig.2 Car washer state-jump diagram
洗车机处于图中状态情况时,执行的功能如下。
洗车机处于初始态,当洗车机就绪继电器吸起时,转为洗车机就绪状态。
洗车机就绪状态:向ATS 发送洗车机状态;判断是否满足跳转条件,若洗车进路办理成功,则转为洗车就绪状态。
洗车就绪状态:判断是否满足跳转条件,若收到车载VOBC 的洗车请求,则转为请求洗车状态。
请求洗车状态:向洗车机发送洗车请求(驱动对应继电器吸起);判断是否满足跳转条件,若收到洗车机的洗车回复,则转为回复洗车状态。
回复洗车状态:向车载VOBC 发送洗车的请求回复信息;判断是否满足跳转条件,若收到车载VOBC 的暂停信息,则转为暂停状态。
暂停状态:向洗车机发送暂停命令信息;判断是否满足跳转条件,若收到车载VOBC 的停稳1 信息,则转为停稳1 状态。
停稳1 状态:向洗车机发送停稳1 列车状态信息(驱动对应继电器吸起);判断是否满足跳转条件,若收到洗车机的移动1 命令,则转为移动1 状态。
移动1 状态:向车载VOBC 发送移动1 的命令信息;判断是否满足跳转条件,若收到车载VOBC 的暂停信息,则转为暂停状态。
暂停状态:向洗车机发送暂停命令信息;判断是否满足跳转条件,若收到车载VOBC 的停稳2 信息,则转为停稳2 状态。
停稳2 状态:向洗车机发送停稳2 列车状态信息(驱动对应继电器吸起);判断是否满足跳转条件,若收到洗车机的移动2 命令,则转为移动2 状态。
移动2 状态:向车载VOBC发送移动2 的命令信息;判断是否满足跳转条件,若收到洗车机恢复继电器吸起信息,则转为洗车恢复状态。
洗车恢复状态:判断是否满足跳转条件,若洗车机就绪继电器吸起、洗车进路解锁,则转入洗车机就绪状态。
5 结束语
全自动洗车相比传统洗车,具有高可靠性、高安全性、高自动化程度的特点,联锁系统与洗车机接口的交互信息也更加丰富。本文主要对洗车信息交互、接口方式、通信流程及洗车机状态转换等方面进行研究。在设计方案的过程中,需要综合考虑各方面因素,以更好的实现全自动洗车功能。
