某型飞机方向舵偏角限制装置故障分析
2021-04-12刘国庆刘菊红
刘国庆 刘菊红
摘要:某型飞机方向舵偏角限制装置机上地面调试时不满足性能指标要求。通过对限偏装置的原理分析、方向舵操纵系统原理分析、方向舵操纵系统安装、刚度检查及方向舵操纵系统传动检查,结合检查和分析结果得出故障原因,拟定故障解决方案并在机上调试,成功排除了故障。该经验可为类似限偏装置系统的设计、安装、调试工作提供参考。
关键词:方向舵;舵偏转限幅器;公差
Keywords:rudder;rudder deflection limiter;tolerance
1 故障描述
某型飞机采用方向舵偏角限制装置(下称限偏装置)来限制方向舵在不同空速下的最大偏转角度[1],以防止在大速度下方向舵偏度过大导致方向舵载荷超过结构强度限制[2]。方向舵偏角限制规律如图1所示。不同空速下对应的限制偏度公差如表1所示。
在对限偏装置进行机上地面调试时,发现大部分角度公差不能满足要求,具体如表2所示。
2 方向舵偏角限制装置
2.1 限偏装置工作原理
在起飞及降落阶段飞机的速度较慢,这时方向舵的效率较低,飞机需要较大的方向舵偏角来对准跑道,若存在大侧风时甚至会用到方向舵满偏角度来纠偏;但在高速飞行情况下,随方向舵偏转而增加的气动面载荷非常大,常常会超过机体結构所能承受的载荷,因此需要根据空速来限制方向舵的最大偏角。在机械无助力的飞行操纵系统中,飞行员能发出的最大力是有限的,因此也就自动满足了方向舵限偏的要求;但在不可逆机械助力或电传飞控系统中[3],飞行员并不能直接感受到方向舵上的气动载荷,因此在高速情况下必须对方向舵的偏角予以限制以保证飞行安全。
方向舵限偏装置工作原理如图2所示。电动机构的活塞杆伸出或收回改变菱形四连杆机构的形状,使止动点与活塞杆轴线的距离增加或减少,从而限制旋转摇臂的最大转动角度。
2.2 限偏装置与系统的交联
限偏装置并联在方向舵操纵系统传动线系中,如图3所示。限偏装置的旋转摇臂与脚蹬的协调转轴固连在一起,根据限偏装置的原理,当限偏电动机构的活塞杆伸出或收回时,脚蹬协调转轴的最大偏转角度也因此改变,相当于限制了脚蹬的最大操纵行程,最终决定了方向舵的最大偏转角度。
3 故障分析
3.1 限偏电动机构安装偏差
根据表2中方向舵偏度结果,大部分不合格的数值都是在操纵左脚蹬时出现,且操作副驾驶左脚蹬时方向舵偏角比操作主驾驶左脚蹬时方向舵偏角要小。经过理论计算,在方向舵偏度6.5°状态时,如果方向舵偏角限制电机在航向方向偏差1mm,会引起副驾驶脚蹬位置与理论位置产生2mm的偏差。从脚蹬位移测量结果反推,方向舵偏角限制电机安装位置与图纸偏差1mm。
3.2 系统刚度问题
驾驶舱地板结构的刚度较差,且限偏装置安装在副驾驶脚蹬协调转轴下,从副驾驶脚蹬协调转轴到助力器的传动路径长,从正驾驶脚蹬协调转轴到助力器的传动路径短,因此操作正驾驶脚蹬和操作副驾驶脚蹬的刚度是不一致的。
空速为254km/h时,主驾驶操纵脚蹬时方向舵的左偏度比副驾驶操纵脚蹬时方向舵的左偏度大0.6°,主驾驶操纵脚蹬时方向舵的右偏度比副驾驶操纵脚蹬时方向舵的右偏度大0.56°。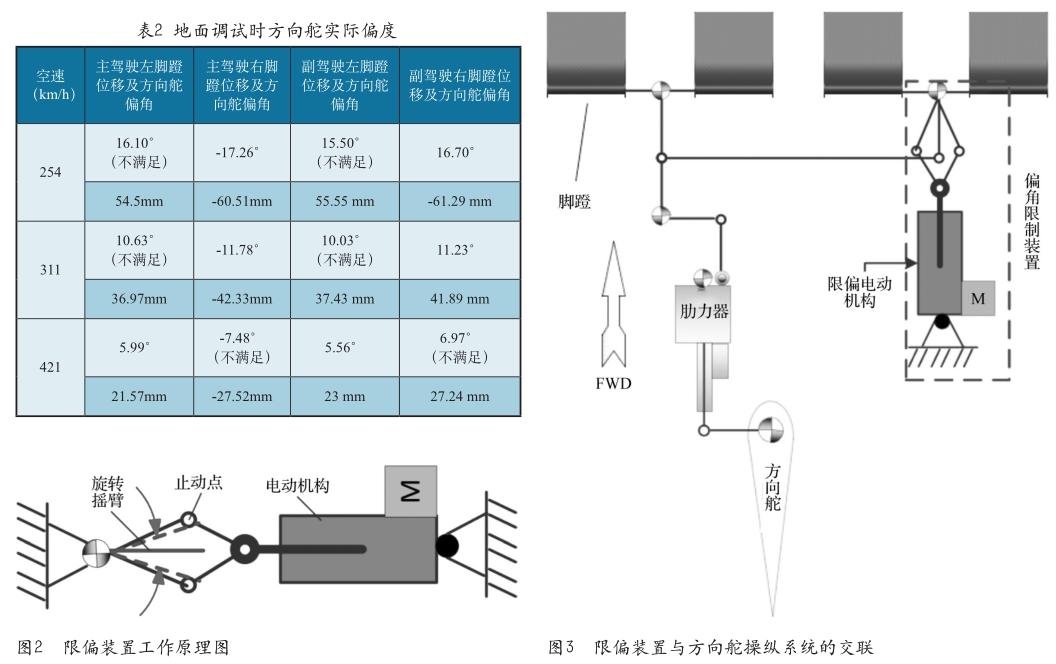
空速为311km/h时,主驾驶操纵脚蹬时方向舵的左偏度比副驾驶操纵脚蹬时方向舵的左偏度大0.6°,主驾驶操纵脚蹬时方向舵的右偏度比副驾驶操纵脚蹬时方向舵的右偏度大0.55°。
空速为421km/h时,主驾驶操纵脚蹬时方向舵的左偏度比副驾驶操纵脚蹬时方向舵的左偏度大0.43°,主驾驶操纵脚蹬时方向舵的右偏度比副驾驶操纵脚蹬时方向舵的右偏度大0.51°。
脚蹬的行程越大,需要的脚蹬操作力越大。主、副驾驶在同一空速下对应的方向舵偏度差别与脚蹬力大小有关,从表2中可以看出。脚蹬行程越大即脚蹬力越大,方向舵偏度差别就越大。
3.3 系统空行程
对方向舵操纵系统的调整是在系统未通压的情况下进行的,由于方向舵操纵系统的传动路径较长,系统的空行程较大,在未通压下将系统调整到中立位置,当系统通压后会发现方向舵相对于理论中立位置向左偏离了近1°。
4 解决措施
由于限偏装置在机上已经安装完毕,机上安装维护空间非常狭小,如果要对其进行重新定位,势必要拆除附近多个设备,考虑到实施周期过长,暂不采取该措施。国内其他飞机限偏装置的安装位置一般都非常靠近助力器,这是为了避免系统各部分刚度不一致问题,如果要将限偏装置从驾驶舱位置挪到垂尾助力器前,还需对结构进行开口,且线束也需做大的更改,因此也不采取该措施。
根据表2的实测数据和允许的公差,拟先对方向舵操纵系统进行通压调整,尽量提高方向舵操纵系统在中立位置时的精度。再针对每个空速档位的超差情况,更改限偏装置电动机构的活塞杆行程,以补偿其超差部分。
4.1 通压调整系统
在系统通压情况下,对方向舵操纵系统进行中立位置基准调零。在此基础上对方向舵偏角限制装置的测试结果如表3所示。从表3中可以看出,不满足的项数明显减少,且都是在操作副驾驶时才出现超差情况。对于空速421km/h对应的档位已经满足设计要求,不需要进行调整。
测试结果显示,254km/h档位偏小,311km/h档位偏小,因此,在254km/h档位上,若对方向舵偏角增加0.48°,方向舵偏角将全部满足设计要求。在311km/h档位上,若对方向舵偏角增加 0.42°,方向舵偏角将全部满足设计要求。
根据传动比计算,方向舵在254km/ h档位上增加0.48°的偏角,电机输出应该增加1.012mm。方向舵在311km/h档位上增加0.42°,电机在175节档位时的电机输出应該增加0.658mm。
4.2 限偏装置电动机构控制更改
更改限偏装置电动机构的输出行程后,均匀缓慢地蹬脚蹬,得出方向舵偏角限制装置工作状态下方向舵偏度的测试结果,如表4所示。
由于系统空行程的存在,使得在快速操纵脚蹬时方向舵的偏度会存在部分超差。快速操纵脚蹬时的方向舵偏度如表5所示。
快速蹬脚蹬时,311km/h档位超过了公差0.04°,421km/h档位超过了公差0.39°。在311km/h档位时,如果将方向舵偏度减小0.21°,在各种操纵状态下都将满足要求。针对421km/h档位出现的现象,根据以往的调试结果,如果再向下调整容易出现计算机指令与电机的电位计行程不匹配,因此不针对421km/h档位再调整。更改电机输出行程后的方向舵偏度测试结果如表6所示,所有结果均在要求的公差范围内。
5 结论
针对方向舵偏角限制装置的故障,从限偏装置原理出发,结合交联的方向舵操纵系统原理进行分析,确定故障原因。本文并未直接针对引起故障的原因进行调整和修正,而是根据实际的施工难度及进度,从其他容易实施的措施来间接解决系统故障,在解决问题时应跳出“修正引起故障的原因来消除故障”这一思维的禁锢。本文对今后相似系统的设计提供了经验参考,应极力避免类似问题的出现。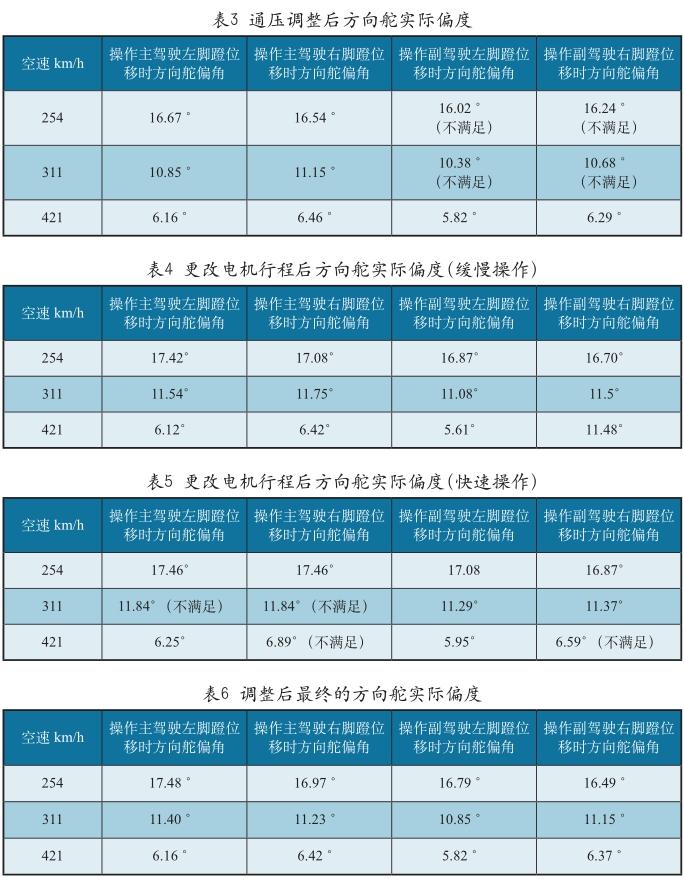
参考文献
[1]《飞机设计手册》总编委.飞机设计手册第6册 气动设计[M].北京:航空工业出版社,2002.
[2] 《飞机设计手册》总编委会编.飞机设计手册第9册 载荷、强度和刚度[M].北京:航空工业出版社,2001.
[3] 徐鑫福,冯亚昌.飞机飞行操纵系统[M].北京:北京航空航天大学出版社,1989.
作者简介
刘国庆,高级工程师,研究方向为飞机飞行控制系统设计。
刘菊红,研究员,研究方向为飞机飞控总体设计。
