基于LTR动态预测的重载车辆防侧翻滑膜控制研究
2021-03-30黄卫红路永婕王子晨张俊宁
黄卫红, 路永婕,2, 王子晨, 张俊宁
(1.石家庄铁道大学 机械工程学院,河北 石家庄 050043;2.省部共建交通工程结构力学行为与系统安全国家重点实验室,河北 石家庄 050043;3.石家庄铁道大学 交通运输学院,河北 石家庄 050043)
0 引言
随着我国公路运输量和运输速度的不断增加,重载汽车的数量不断增加。重载汽车常因质量大、质心高等特点,在遇到较大转角及躲避障碍物等危险工况时易发生侧翻,由重载汽车造成的道路交通事故数量高居首位[1-2]。因此及时预测到车辆的侧翻趋势,并主动对车辆进行控制修正是十分必要的。在防侧翻预测领域,Hamid et al[3]将路面倾斜角融合到所建立的车辆侧翻预警模型中预测车辆的侧翻情况。褚端峰等[4]利用搭建的三自由度车辆模型所计算出的侧向加速度提出一种新的衡量车辆侧翻的指标,替代了传统方法上使用的侧向加速度绝对值作为预测车辆侧翻指标的方法,但在预测车辆具有侧翻倾向时,对车辆的修正及控制较少。在侧翻控制领域,Mobini et al[5]提出了一种通过主动制动来提高车轮平面稳定性的最优控制器来提高车辆的抗侧翻能力。欧健等[6]研究了车辆行驶过程中的不确定性干扰,使用了不变集理论,把状态、控制输入和干扰的约束考虑为鲁棒控制不变集并作为控制器的终端约束,设计了一种主动防侧倾杆来达到给车辆施加额外防侧翻力矩,防止车辆侧翻的目的。张亮修等[7]利用磁流变减震执行器,建立了四自由度的半车模型,有效防止了车辆发生侧翻。曾小华等[8]根据线性二次型最优控制原理设计主动防侧翻控制器,该控制器决策出车辆抗侧翻所需要的最优横摆力矩,能够有效提高车辆的侧倾稳定性。以上多为针对乘用车的主动及被动安全控制,针对重载汽车的预测车辆侧翻并进行主动安全控制的算法较少。
本文首先搭建了卡尔曼滤波算法,对车辆未来2 s内的状态进行预测,结合ABS制动模型对车辆进行主动差动制动控制。在Simulink中搭建了预测模型和主动制动模型对TruckSim中搭建的整车动力学模型进行调控,通过对车辆在典型工况下测试所得的实验结果进行分析,得到所搭建的预测算法及主动制动控制算法可以很好地提高车辆在转向时的抗侧翻能力,验证了预测及控制算法的有效性。
1 三轴重载汽车侧翻动力学模型
整车模型采用TruckSim中的3A cab over整车模型,为更接近真实情况,该车辆模型额外附加质量为10 000 kg的负载。整车模型对外输出车速、方向盘转角、制动主缸压力、横摆角速度以及各车轮轮速。该整车模型的输入为各个车轮的制动轮缸压力。
基于研究目标和便于建模、分析,作出如下假设:
(1)忽略重型车辆的俯仰运动和垂向运动;
(2)忽略由于载荷的变化引起重型车辆左、右轮轮胎特性的变化、轮胎回正力矩的作用;
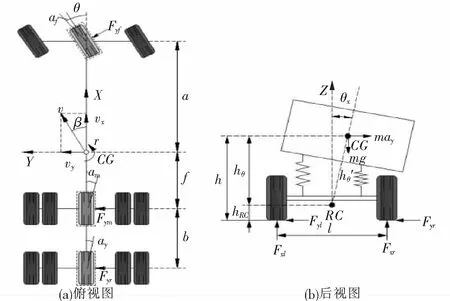
图1 三轴重载汽车侧翻动力学模型
(3)忽略一些非线性因素的影响,如车辆的悬架、轮胎和非簧载质量引起的影响;
(4)假设重型车辆的左、右轮动力学特征对称于X轴;
(5)假设重型车辆的车身侧倾角度很小,其横向速度相对车辆的行驶速度很小,可以进行线性化处理;
(6)不考虑空气动力的影响。
基于上述的假设,建立三轴重载汽车三自由度动力学模型,如图1所示。
建立如下动力学微分方程:
侧向运动微分方程
(1)
横摆运动微分方程
(2)
侧倾运动微分方程
(3)
式中,hθ′为簧载质心到侧倾中心的距离;l为左右车轮轮距;θx为簧载质量的侧倾角度;θ为前轮转角;r为横摆角速度;β为质心侧偏角;a、f分别为质心至前、中轴轴距;b为中轴至后轴距离;vx为质心纵向速度;Ix为整车质量绕侧倾中心的纵轴转动惯量;Cv为前轮胎的总侧偏刚度;Ch为中、后轮胎的总侧偏刚度;k为悬架等效垂向刚度;c为悬架等效垂向阻尼。
2 基于Kalman滤波的车辆侧倾状态估计
同时,令观测矩阵H=C。
设定滤波器的时间更新部分

(4)
P(k|k-1)=GP(k-1|k-1)GT+Q
(5)
设定滤波器的状态更新部分
Kg(k)=P(k|k-1)CT(CP(k|k-1)CT+R)-1
(6)
(7)
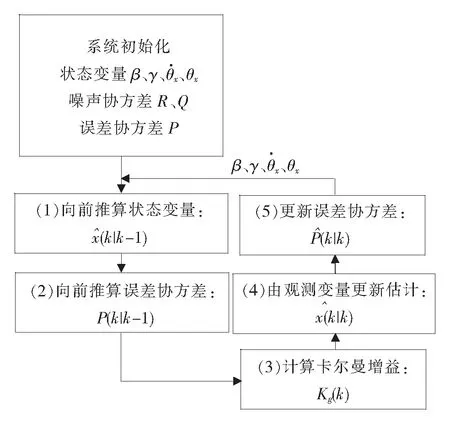
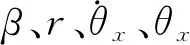
图2 Kalman滤波器原理图
P(k|k)=(I-Kg(k)C)P(k|k-1)
(8)
式中,P为误差协方差;Kg为Kalman滤波增益;G、F为重载汽车侧翻模型离散化的矩阵;C为系统矩阵;侧向加速度ay为系统观测量;θx为系统估计量。
选取由Miege et al[9]提出的可以实时计算出横向载荷转移率的算法,具体的计算公式为
(9)
式中,g为重力加速度;hRC为侧倾中心到地面的距离。
计算车辆实时的横向载荷转移率时所需要的侧向加速度ay可以通过车上的加速度传感器直接测量得到,而计算所需要的侧倾角θx则由Kalman滤波对其进行实时估算。Kalman滤波器原理如图2所示。
3 重载汽车主动防侧翻控制
3.1 基于车辆侧倾状态估计的防侧翻控制策略
利用Kalman滤波算法预估出未来2 s内车辆的动态横向载荷转移LTR′,若LTR′超出安全阈值则启动车辆的差动ABS制动系统,在保证将车辆制动控制在最佳滑移率的条件下给车辆增加反向的横摆力矩,抑制并降低车辆的侧倾趋势,增加车辆在转向时的稳定性,提高操作稳定性。防侧翻策略如图3所示。
图3 重载车辆防侧翻策略
3.2 基于差动制动的重载车辆横摆力矩控制
差动制动实质上是通过对单独一个或者多个车轮进行各自制动而产生的横摆力矩。通过利用这一横摆力矩可以使车辆朝着缩小车辆实际横摆角速度和理想横摆角速度差距的方向运动。不同车轮在差动制动时对车辆所产生的横摆力矩是不同的,重载汽车的前轮在制动时对车辆所产生的外向横摆力矩是最大的,对于车辆过度转向的控制较为有效。然而,后轮在制动时所产生的内向横摆力矩是最大的,对车辆的转向不足的控制较为有效。因此,针对重载车辆的操纵稳定性和防侧翻控制,制定制动力控制逻辑如表1所示。
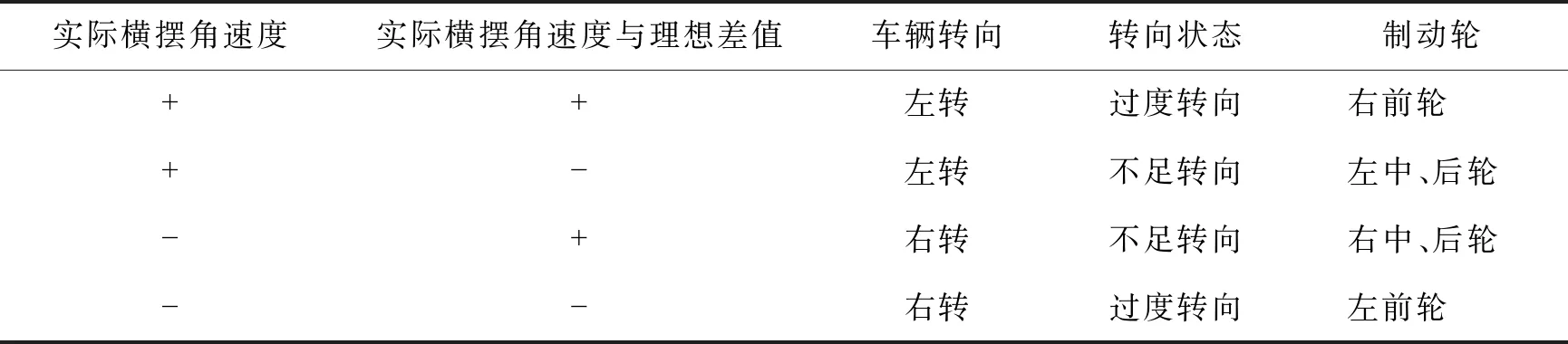
表1 制动力控制逻辑
在表1中,具体逻辑关系描述为:
(1)若横摆角速度为正值时,车辆处于左转状态,此时车辆实际横摆角速度与理想的横摆角速度的差值有正负2种情况,如果为正,则说明车辆处于过度转向状态,应当制动右前轮;如果为负,则说明车辆处于不足转向状态,应当制动左中、后轮。
(2)若横摆角速度为负值时,车辆处于右转状态,此时车辆实际横摆角速度与理想的横摆角速度的差值也有正负2情况,如果为正,则说明车辆处于不足转向的状态,应当制动右中、后轮;如果为负,则说明处于过度转向状态,应当制动左前轮。
3.3 基于滑膜控制的ABS制动模型
忽略车辆在制动过程中的空气阻力和滚动阻力,车轮的运动方程为
(10)
定义滑移率为
(11)
求导得
(12)
式中,Fx为车轮纵向摩擦力;R为车轮滚动半径;Tb为车轮制动力矩;I为车轮转动惯量;W为车轮角速度;λ为实际车辆滑移率。
滑膜变结构控制能够迫使系统强制工作在一定的状态下,即沿着规定的状态轨迹作高频的上下运动。由于滑动模态与系统参数及外界扰动无关,所以使用滑膜变结构控制能够使系统拥有很好的鲁棒性。
定义实际滑移率与理想滑移率的误差为e,定义滑膜面为
S=e=λ-λd
(13)
式中 ,λd为理想滑移率。
求导得
(14)
由李雅普诺夫能量公式得
(15)

(16)
由式(16)可知,系统趋于稳定。
联立式(10)、式(12)、式(14)可得
(17)
(18)
得控制律为
(19)
4 防侧翻控制效果分析
4.1 Fish-Hook工况控制效果
设定该测试工况的初始车速为60 km/h,路面附着系数设定为0.85,系统采样频率设置为1 000。图4~图8为含有防侧翻算法与不含防侧翻算法的对比结果。

图4 横向加速度对比结果

图5 横摆角速度对比结果
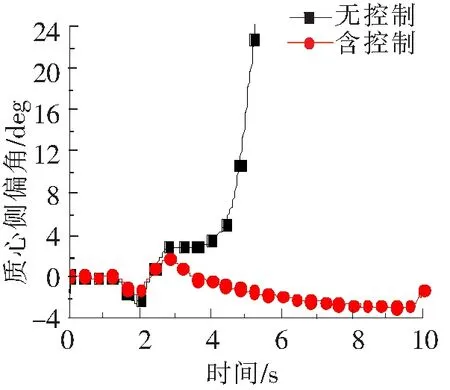
图6 质心侧偏角对比结果

图7 侧倾角对比结果
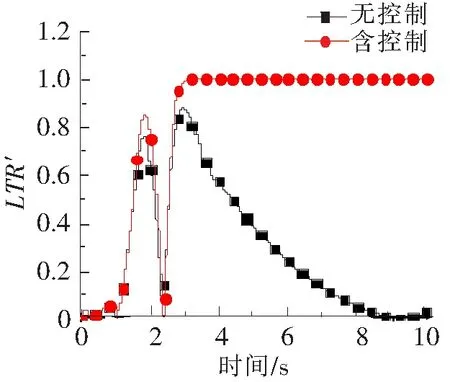
图8 横向载荷转移率对比结果
由图4~图8可以得出,在0~2.5 s时含控制车辆与不含控制车辆的横向加速度、横摆角速度、质心侧偏角以及侧倾角的变化差异不大,但是LTR′出现了相对较大的差异,含有控制的车辆对LTR′的增大抑制较好。车辆在2.5 s以后,由于车辆保持持续转向的状态,进一步增大了侧翻的可能性,不含控制的车辆在约4 s时LTR′值增加至1,车辆失去控制,横摆角速度、质心侧偏角、侧倾角以及横向加速度发生突变,车辆发生侧翻,而含有控制的车辆约在2 s时预测到了发生侧翻的可能性对车辆进行了控制,LTR′值明显减小直至降低至零值附近,且横摆角速度、质心侧偏角、侧倾角变化以及横向加速度均较平缓,将质心侧偏角控制在了-4~3 deg之间,侧倾角控制在-4~4 deg之间,有效防止了车辆发生侧翻。
4.2 阶跃转向工况控制效果
设定进行角阶跃实验测试时的车速为70 km/h,车辆在前2 s沿直线行驶,2~2.6 s方向盘阶跃输入,方向盘转角为240°,2.6 s后维持方向盘转角不变。路面附着系数设置为0.85。系统采样频率设置为1 000。角阶跃转向时的仿真测试结果如图9~图13所示。

图9 横向加速度对比结果

图10 横摆角速度对比结果
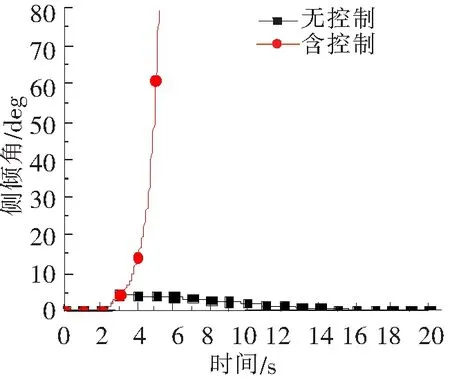
图11 侧倾角对比结果

图12 质心侧偏角对比结果

图13 横向载荷转移率对比结果
由仿真测试结果可知,2 s后车辆的LTR′值开始迅速上升,无控制的车辆约在3 s时失去控制LTR′值达到1,横向加速度、侧倾角、质心侧偏角发生突变,车辆发生侧翻。而含有控制的车辆在预测到车辆将要发生侧翻时,对车辆进行控制,迅速降低车辆的LTR′值,将其降至0附近。将横摆角速度控制在17 deg以内,侧倾角控制在5 deg以内,质心侧偏角控制在-2~2 deg之间,横向加速度缓慢降低至车辆停止。测试结果表明,该控制方法能够有效预测到车辆的状态,并且对其进行控制,有效防止车辆侧翻。
5 结论
在Simulink中建立三自由度模型,并且利用该模型建立了Kalman滤波预测模型,依据每一步长下的车辆状态通过预测模型计算车辆未来的运行状态。并利用差动制动原理搭建了主动防侧翻的差动ABS制动模型,纠正车辆的侧翻趋势;在TruckSim中建立整车模型,分析在控制算法下的响应。由TruckSim-Matlab/Simulink联合仿真结果分析可知,该预测及控制模型可有效预测出车辆状态,并且当车辆出现侧翻趋势时,能够将车辆的侧倾角、质心侧偏角、横摆角速度保持在安全范围内,有效降低车辆的横向载荷转移率,为后续的重载汽车的操纵稳定性控制奠定了基础。
