智能指示航标的开发与应用*
2021-01-12刘栋
刘 栋
(中国船舶集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引 言
资料显示,目前长江航道航标设置采取的主要措施是在航道相应位置系泊航标船,船上搭载不同功能航标灯用以指示航道[1]。但此种方式带来的不便是固定系缆绳长度式航标船随着河水水位的变化,位置会发生改变,同时存在系留缆张力增大而破断,导致指示航标流失的危险,此时需要航道管理人员人工调整航标船系留缆长度以调整航标位置,以确保航标船处于合适位置。随着三峡工程的陆续完工,长江航道逐步成为我国流域运输综合体系的重要一极,是沿江地区外向型经济发展的重要支撑,长江航道建设进入整体加速推进的新阶段。为促进长江黄金水道建设,提高航道通航效率,全面提高航标的维护保养水平,笔者开展了智能指示航标研究。
智能指示航标研究目标是设计一种可根据指示航标布放水域水位变化自动调整其系留缆长度的无人值守系统,通过指示航标锚索长度与水位对应关系研究、系统总体配置研究,完成系统总体设计以及收放绞车、控制系统、通信系统及控制软件设计等主要组部件研制,通过江上实船试验验证,其基本具备随水位变化而自动调节系留缆长度功能,可满足智能指示航标江上无人值守使用要求。
1 系统概述
智能指示航标系统组成示意图如图1所示,其主要组成为太阳能供电装置、缆长测量装置、控制通讯单元、测深装置、收放绞车、航标船、锚索及锚等。通过上述组成单元,智能指示航标可实现如下主要功能:①根据水位变化自动调整系留锚索长度;②可实时测量水深;③绞车收放缆长监测;④指示航标工况信息监测(包括绞车故障信息、供电故障信息、船底漏水报警等);⑤可与管理中心数据双向传输;⑥扩展功能:控制系统预留标准接口,可根据需要加装GPS定位系统、温度传感器、风向和风速传感器、流速计、监控系统等。
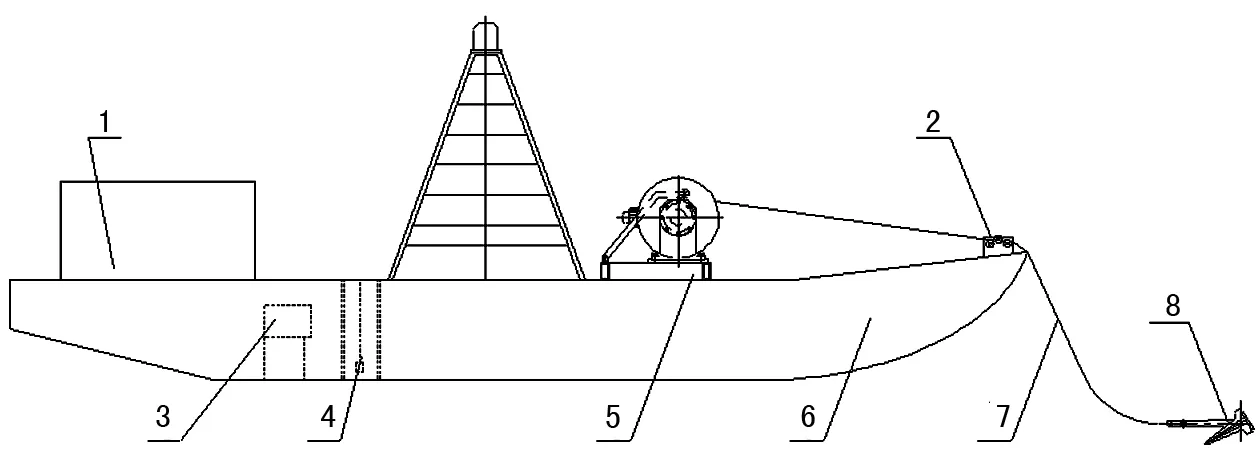
图1 智能指示航标系统组成示意图1.太阳能供电装置 2.缆长测量装置 3.控制通讯单元 4.测深装置 5.收放绞车 6.航标船 7.锚索 8.锚
2 系统工作原理
内核船型航标一般通过船艏单点锚泊于河道[2],如图2所示,受水流速度水深变化影响,其缆索量需要定期调整,为了保障航标安全及位置相对固定,一般设定缆索长度为水深3~7倍,水流速度越大,其取值越大,但在汛期,流速及水深变化较大,缆绳长度调整不及时会导致航标位置偏移过大或缆索受力过大而断裂,存在航道标示不准、被撞及断索丢失风险。本系统原理是通过监测水深、流速及缆索长度等信息,依据一定比例自适应调整,保障航标安全[3]。
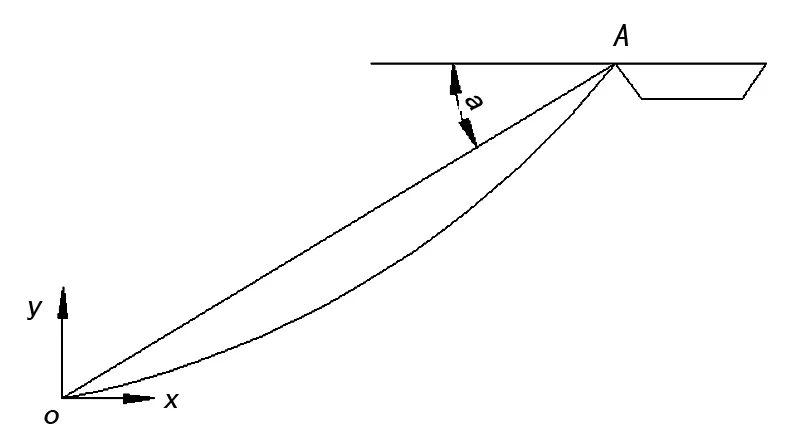
图2 锚系模型
智能指示航标不依赖人工干预,通过系统相关参数采集,完成缆索自主调整,其相关参数调整模型如图3所示。监测水深变化,并依据一定比例调整缆长,通过监测水流速度计算安全张力,通过监测张力是否大于安全张力来调整缆长调节量与水深变化量之间比值。

图3 参数选择模型
3 收放绞车设计
收放绞车的主要功能是通过对钢丝绳的收放,实现航标船体位置的调整。航标绞车系统主要由驱动电机(含制动器)、减速机、绞盘、机架、压紧轮,其结构简图如图4所示。驱动电机选用直流力矩电机,本身配置有失电制动器,通过减速机为绞盘提供动力,实现钢丝绳的收放作业,同时具有锁定能力。减速机为标准三级斜齿轮减速机,输出扭矩大。机架为整体框架式结构,作为绞盘、电机等的支撑部件,同时也是收放绞车在航标船上的安装固定平台。压紧轮通过弹簧提供动力压紧在绞盘上,保证钢丝绳整齐排列于绞盘之上。

图4 收放绞车
4 控制系统设计
控制系统如图5所示,中心控制单元系统核心,一方面通过各类传感器监测智能指示航标工作状态,另一方面,通过测深仪实时测量当前水深数据,并依据设定好比例控制绞车收放缆绳,缆长变化量实时监测,完成智能航标缆长量随水深变化的自主调整。为了保障系统安全性及缆长调整准确性,系统同步监测水流速度及缆绳张力,设定安全张力值,从而实时调整水深变化量与缆长收放量之间比例。系统相关参数通过4G通信模块上传至手机APP,实现手机端系统状态查询及控制。

图5 指示航标控制系统组成框图
5 通信系统设计
4G通讯单元作为指示航标系统与指挥中心的通讯接口,接收指挥中心的数据和命令并转发给电机驱动及控制单元,并将电机驱动及控制单元返回的工况信息和检测到的报警信息发给指挥中心。
通讯内容包括:指挥中心发出的控制指令、水深数据,无线通信单元发出的工况数据、收放缆绳数据、电池欠压报警信息,控制舱漏水报警信息、绞车故障报警信息。见图6。
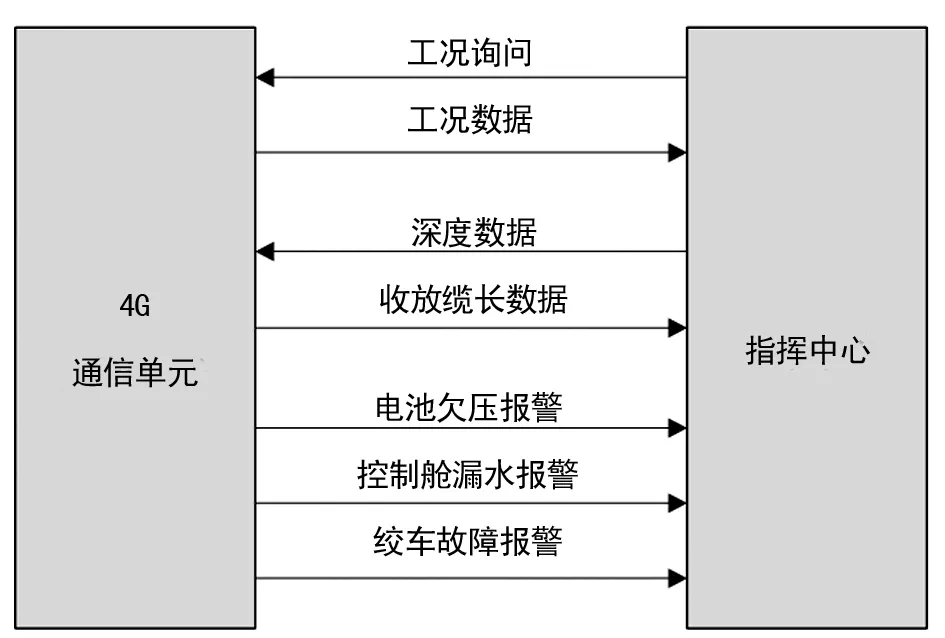
图6 无线通信单元通信内容
6 软件设计
指示航标软件是航标船(浮标)系缆绳随水位变换自动收放装置上位机操作软件(见图7),具备对整个装置控制功能、设备工作状况显示功能、工作日志记录功能、水深数据记录及历史数据回放功能。

图7 指示航标软件主界面
7 现场试验
在前期实地考察的基础上,在岳阳航道管理处完成试验航标船改造、设备安装、并开展江上试验。系统设定收放缆长与水深比值为3,缆长总长200 m,初始水深为9.3 m,初始放缆27.9 m,初始剩余缆长172.1 m,水深变化依据当前水深增减,系统于长江岳阳段水域进行了江上试验,试验结果表明,随布放水域水深变化,收放绞车能自动收放系留缆,并上传相应数据,取得了预期效果。试验结果见表1。
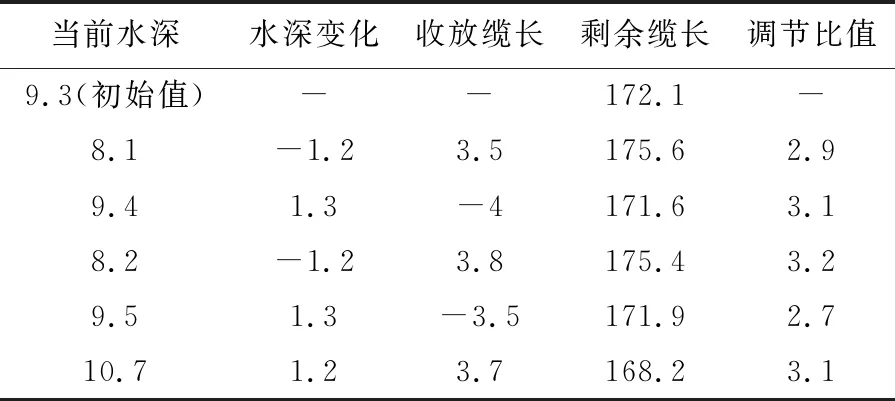
表1 水深变化与收放缆长关系 /m

图8 试验航标船
8 结 语
此智能指示航标通过自身水深测量装置实时监测水深变化,智能化调节系缆绳长度;采用无线传输方式控制及太阳能电池供电,可实现自动化作业,无需人工干预;克服了通用浮标船系留方式的诸多缺陷,实现了航道航标生产维护的智能化,减少航标随水位变化的损失、减轻航道维护工作量,同时良好的扩展功能为后续数字化航道建设奠定基础,具有较好的应用全景。下一步可结合本装置研究遥控航标、做到航标移位的无人化管理,同时可建立沿岸无盲区监控系统,全航道态势显控系统,真正实现内河航道的数字化管理。