一种三自由度搬运机器人的设计
2021-01-05余亮苗磊高鲁文
余亮,苗磊,高鲁文
(1.淮南师范学院 机械与电气工程学院,安徽 淮南,232000;2.艾欧史密斯(中国)热水器有限公司,江苏 南京,210000)
工业机器人的构造一般分为串联机构和并联机构,其中串联机器人主要由底座、腰部、大臂(上臂)、小臂(前臂)、腕部和手部组成[1-2]。常见的三自由度串联机构采用的是开链结构,驱动关节依次串接,具有工作负载能力大、操作空间广、运动控制简单易实现等性能优点,但串联机构也存在相应的缺陷,比如机构刚度低、末端执行器运动误差大、控制精度低、不便实施于高速作业等。常见的三自由度并联机器人主要由静平台、动平台和连接两者之间的3条运动支链组成。并联机构采用的是闭链结构,驱动关节主要安装在静平台上,动平台由多条运动支链与静平台相连,因此,并联机构具有机构刚度大、稳定性好、运动误差小、动态响应好、运行速度高且精确度高等优点,但并联机构同时具有操作空间小、系统耦合性强、控制系统设计较难等缺点。由此可见,串联、并联机器人在机构和性能上存有对偶关系,在生产领域里两者不是替代关系而是互补关系,各自都有其特殊的应用领域[3-7]。
工业机器人广泛应用于包装、分拣、抓取等重复性高的工业现场[8]。为满足国内某公司将冲压机生产的冲压铁线进行自动化搬运改造的需求,结合常见三自由度机器人的结构特征,针对其典型的工业生产应用,开发设计出一种新型三自由度机器人实现冲压铁线的物料搬运。考虑到工作环境较为恶劣,工作地点较为狭窄,不适合高精度的并联机器人进行操作,故所设计机构将单支链串联机构改为具有平行四边形的局部闭链串联机构形式,在不改变串联机构运动学原理的情况下,提升了机器人机构的稳定性和精度,且能在狭长的环境中进行工作。本文针对该机器人关键技术进行研究。
1 功能需求分析
广泛应用在机床上下料等作业的有SCARA机器人和DELTA机器人等。但由于SCARA机器人电机安装位置靠近末端导致其过于臃肿,作业空间受到一定限制,而DELTA机器人精度较高但现场不易布置,且两种类型机器人价格昂贵,故均有不足之处。根据冲压现场调研,见图1。人工操作主要动作步骤为:人工拾取原料铁线→放置在冲压机内冲压成型→取回成料铁线→放置在收集框内→重复动作。为减少成本,提高工作效率,设计一款简易的三自由度机器人实现铁线冲压现场自动化搬运功能。
三自由度机器人主要由驱动系统、控制系统、执行系统3个部分组成,见图2。驱动机构包含2个750 W的伺服电机和1个气缸。伺服电机主要为主动臂提供动力。气缸实现机器人末端执行器竖直方向的运动,满足电磁铁竖直方向(z轴)移动自由度。根据物料性质,设计的执行机构主要有电磁铁、机械臂。电磁铁作为末端执行器用来吸取和放下物料。机械臂的机械结构采用关节式,以满足XOY平面移动自由度要求,将末端电磁铁移动到工作位置。控制系统主要由软件系统和硬件系统组成,搬运机器人工作流程如图3所示。
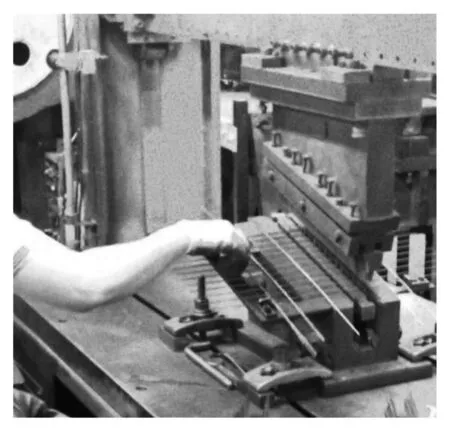
图1 冲压操作现场Fig.1 Stamping operation site
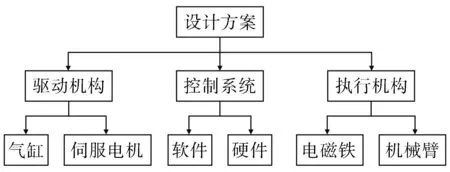
图2 搬运机器人系统组成Fig.2 System composition of the handling robot
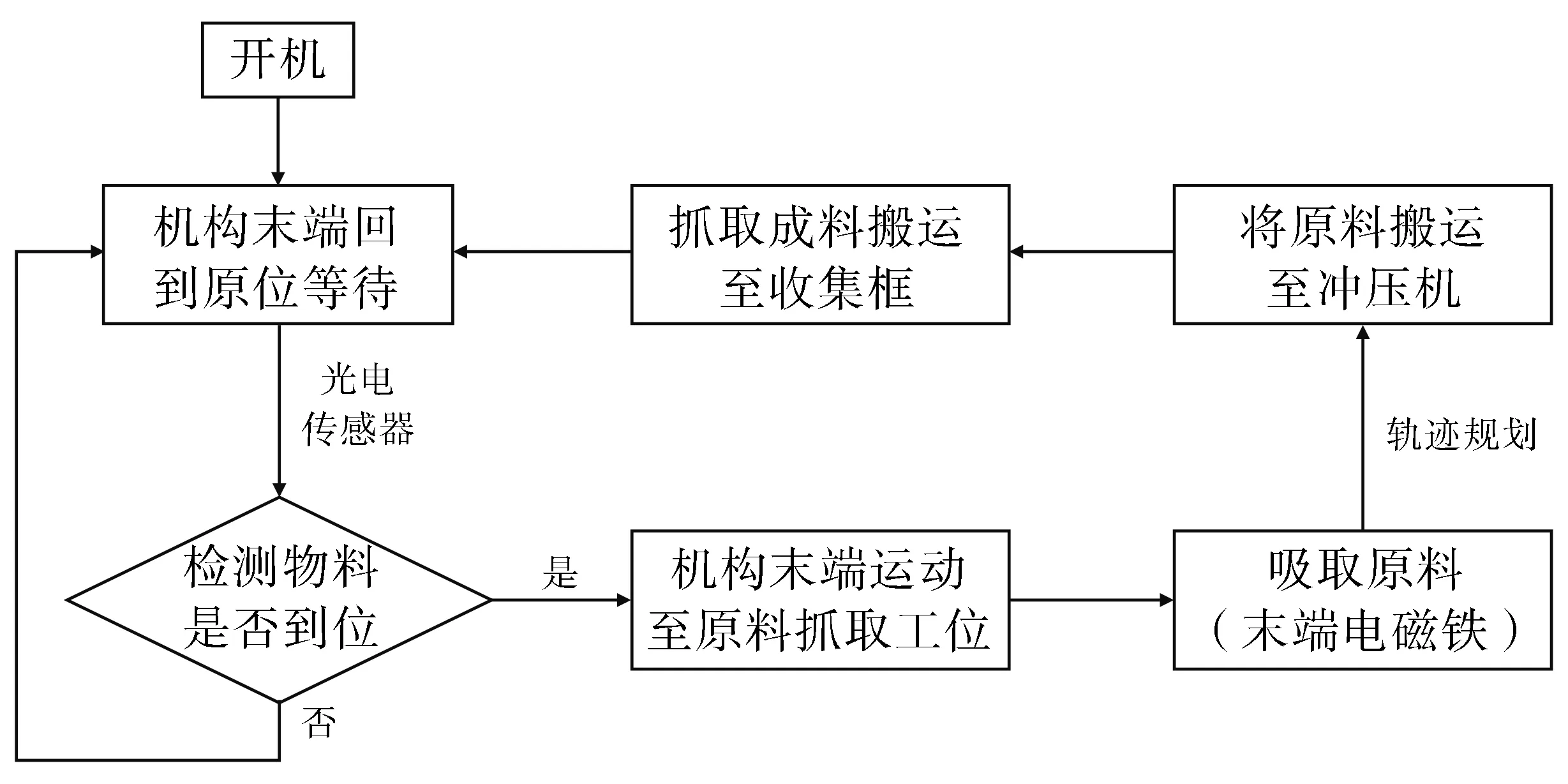
图3 搬运机器人工作流程图Fig.3 Flow chart of the handling robot
2 机械结构设计
根据应用要求设计出三自由度搬运机器人机构[9],见图4。该机构主要含有3个平行四边形局部闭链支链,通过支链串联设计而成。3个局部闭链支链分别是2个主动支链和1个从动支链。第一主动支链包含主动臂Ⅰ、第一保姿态杆、V架和机座;第二主动支链包含主动臂Ⅱ、前臂连杆、前臂和主动臂Ⅰ;从动支链包含气缸安装板、前臂、V架和第二保姿态杆。机构通过3个支链组合限制机构自由度,使其保证有2个平面移动自由度,而使用平行四边形的局部闭链串联结构能有效解决单杆串联导致的刚度和精度不足问题。机器人所使用的减速器为一般的行星减速器,其相较于RV减速器和谐波减速器可大量降低制造成本。本设计与5轴、6轴的串联工业机器人相比较,具有结构简单、形式轻便、调试方便、价格便宜等特点。虽然灵活度略低,但是针对铁线搬运工况是足够的。
3 运动学与工作空间分析
运动学分析是机器人机构设计的理论基础,其与逆动力学分析、伺服电机参数预估、运动控制系统设计等方面相关联,因此,对机构进行运动学分析具有实际意义。由于本机构运动链相对其他串联机构存有多处封闭环,故分析机构的正逆解较困难,为此,将机构简化后再进行分析。
在机器人的工作空间内,末端执行器的姿态始终不变,所以,分析各关节变量与末端执行器位置的关系,利用平行四边形对边平行且相等的原理将其简化,忽略从动支链,把主动支链的杆件和关节简化为直线和节点。机器人装配模型图如图5所示。
3.1 运动学逆解
运动学逆解问题涉及已知动平台参考点O′的位置矢量r=(x,y)T,确定主动臂转角θi(i=1,2),在坐标系O-XY下构造闭环方程。
r=l1u1+l2u2
(1)
式中:l1和l2分别表示主动支链中主动臂、从动臂杆长;u1和u2分别表示主动支链中主动臂、从动臂单位矢量;u1=(cosθ1,sinθ1),u2=(cosθ2,sinθ2)。
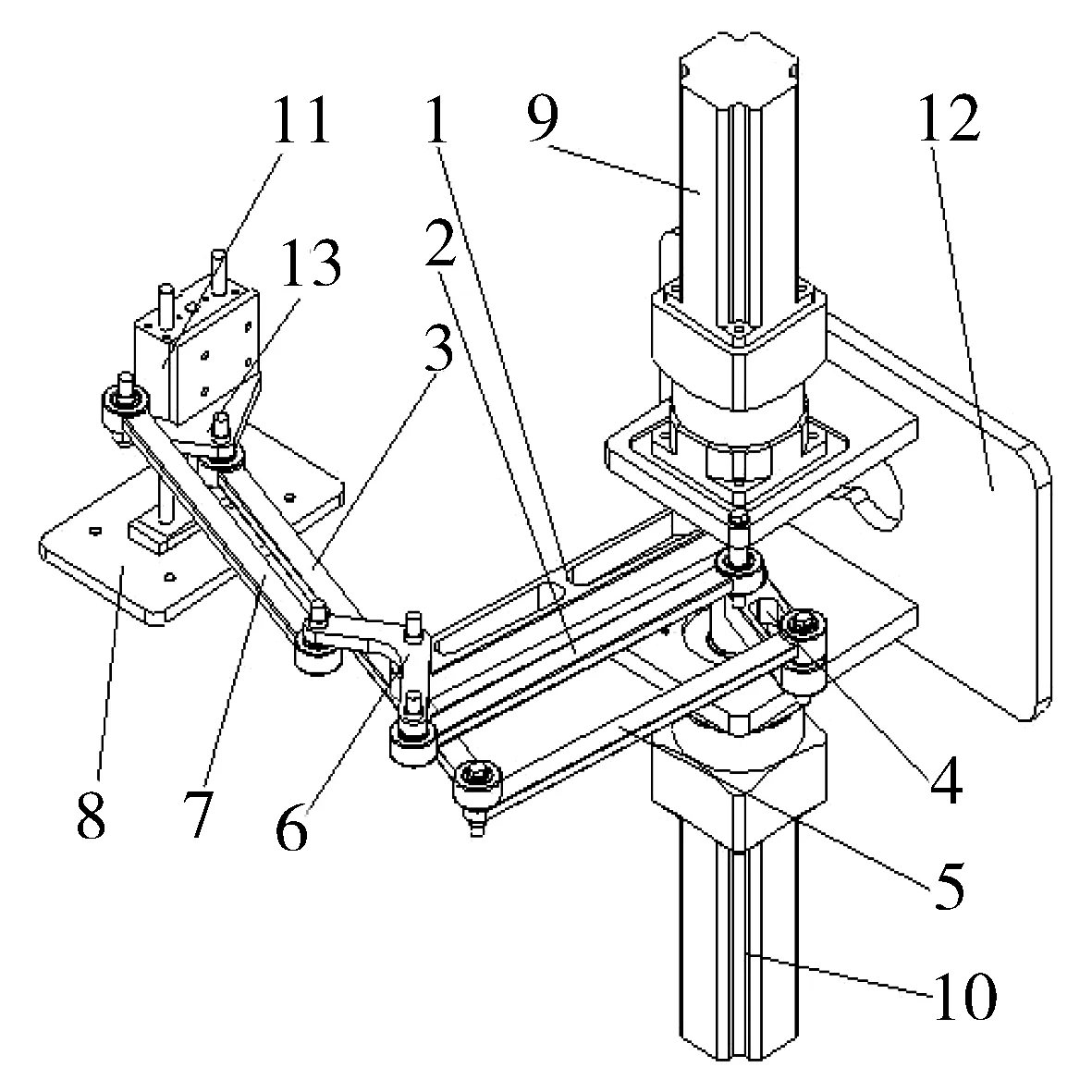
1—主动臂Ⅰ;2—第一保姿态杆;3—前臂;4—主动臂Ⅱ;5—前臂连杆;6—V架;7—第二保姿态杆;8—电磁铁动平台;9—第一驱动装置;10—第二驱动装置;11—竖直驱动装置;12—机座;13—气缸安装板图4 搬运机器人机构图Fig.4 Geometry of the handling robot
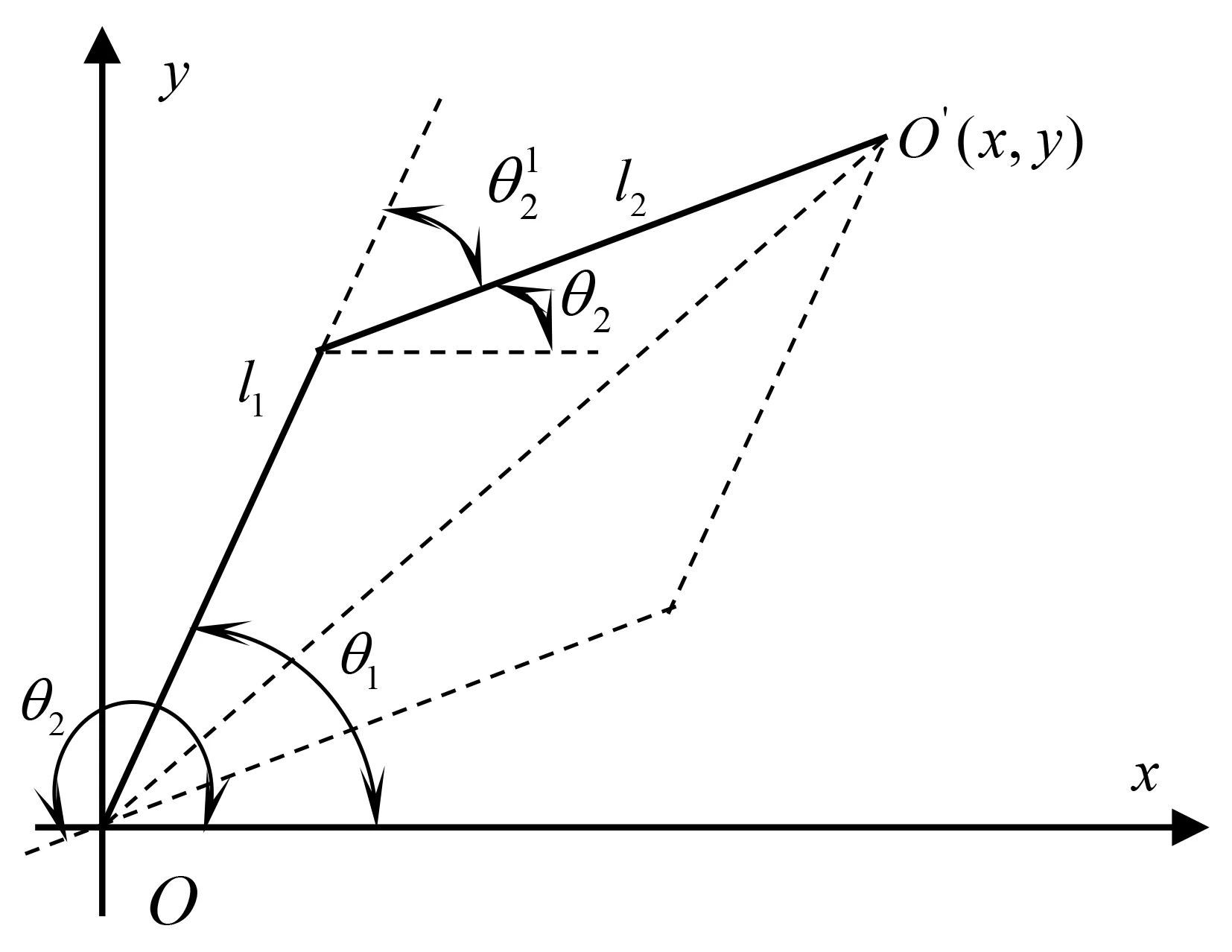
图5 搬运机器人装配模型图Fig.5 Assembly model diagram of the handling robot
由式(1)得
r-l1u1=l2u2
(2)
对式(2)两端取向量的模得(x-l1cosθ1)2+(y-l1sinθ1)2=l22
(3)
经整理得
Asinθ1+Bcosθ1+C=0
(4)
式中:A=-2l1y;B=-l1x;C=x2+y2+l12-l22
(5)
(6)

(7)
根据式(7)可以确定单位矢量u1,由式(2)可以得到:
(8)
3.2 运动学正解
机构的位置正解涉及已知θi(i=1,2),求解末端位置点O′的位置矢量r。
由式(1)得
(9)
r=(x,y)T可根据公式(9)求解,运动学正解能为工作空间的求取提供理论基础。
3.3 工作空间
机器人工作空间是指机器人在运动时,末端动平台能够到达的所有点的集合[10]。该机器人不同于普通的串联机器人,其机构内部存在几个局部闭链。一般研究常规的串联机器人工作空间时,只需要考虑关节的转动范围即可,但是,该机器人由于受局部闭链的约束,对于主动臂Ⅱ相对主动臂Ⅰ的转动范围也需进行考虑。各关节转动范围约束见表1。其中,主动臂Ⅰ受到底座安装板限制,角度最小值为0°,最大值考虑主动臂Ⅱ的运动范围及大角度干涉,设置为135°较合理。而主动臂Ⅱ可以与主动臂Ⅰ同时达到最小值0°且不干涉,故最小值设置为0°,最大值设置则应考虑尽量增大机器人运动范围,根据主动臂Ⅱ与安装板的间隙,可最大设置为190°。由于主动臂Ⅰ相对主动臂Ⅱ始终为非正值,且主动臂Ⅰ和主动臂Ⅱ可以同时为最小值0°,故二者的相对最大值为0°,考虑机构局部闭链的限制,其二者角度差设置为-160°即可,否则,容易使机构构件在运动中产生干涉。

表1 关节转角范围Table 1 Range of joint angle
根据各关节转角运动范围,依据前述正逆解分析结果,利用MATLAB软件编程绘制其末端动平台的操作空间,如图6所示。其为机器人末端轨迹规划提供设计基础。

图6 机器人末端动平台工作空间Fig.6 Workspace of mobile platform at the end of the robot
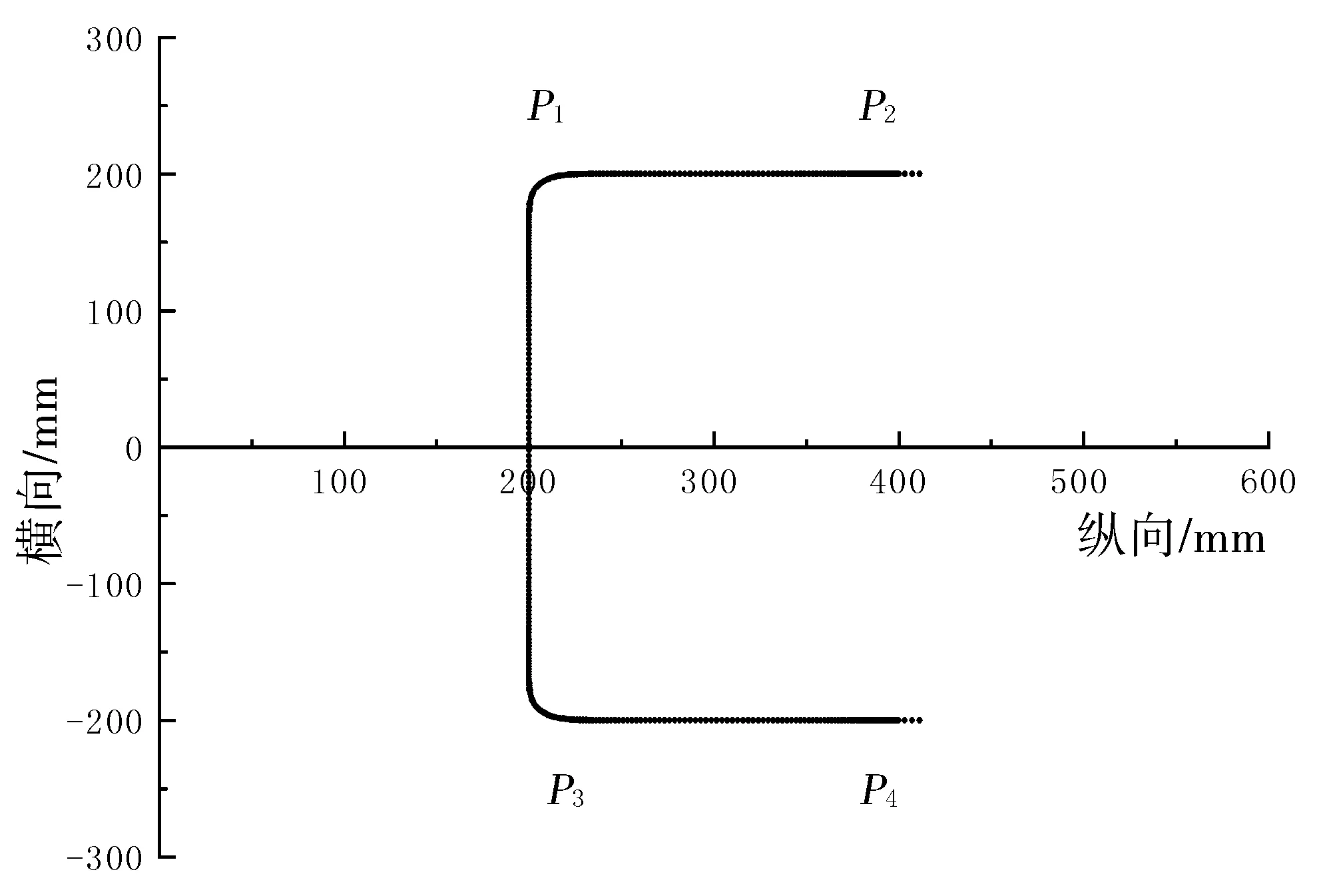
图7 末端点运动路径轨迹规划Fig.7 Trajectory planning of end point motion path
4 轨迹规划与仿真分析
机器人虽然能够显著提高工业制造效率,但是仍然通过精确编程实现[11],故机器人运动轨迹规划必不可少[12]。机器人运动轨道规划是指机器人末端在工作过程中的位姿变化取向、路径及运动规律的人为设定。轨迹规划可归结为关节空间规划和操作空间规划2类[13]。由于本文所设计的机器人运动学逆解已通过计算得出,故选择在操作空间下进行轨迹规划较容易。
根据工况分析可知,现场应用为pick-and-place动作,即机器人从原料点抓取物料,沿着运动路径将其放置在冲压机上进行加工,取回放置在收集框内,如此不断循环。综合考虑运动障碍物的情况以及工作空间,选用“门”字型运动轨迹较为合理。以一次运动过程为例,水平面目标轨迹上的关键坐标值如下:原料拾取点P1=[200,200],原料加工点P2=[400,200],返回中间点P3=[200,-200],成料放置点P4=[400,-200],末端点的运动路径轨迹规划,见图7。
Solidworks Motion是一款功能强大的三维运动学与动力学仿真插件,可以模拟装配体的机械动作以及它们所产生的作用力、驱动力矩、位移和速度等,它提供了多种运动马达、弹簧、力和阻尼等选项用以模拟真实环境。
为方便仿真进行,设计如图8所示的机器人虚拟仿真模型并生产样机。设置θ1初始角度为45°,θ2初始角度为135°,依据轨迹规划及所选的运动规律进行仿真,得到修正梯形加弧线过渡模式下,机器人在“门”字形目标轨迹上的位移、速度和加速度时变关系,见图9。由图9可知:除去初始角度因素(即角位移图中主动臂Ⅰ和主动臂Ⅱ的纵坐标0刻度分别对应的初始角度45°和135°),可知转角范围均在表1所示关节转角范围之内,符合运动要求。主动臂Ⅰ和主动臂Ⅱ角速度和角加速度较为平稳、连续,波动在该机构强度控制范围内,符合工程设计要求。

(a) 模型 (b) 样机图8 机器人虚拟仿真模型与样机实物Fig.8 Virtual simulation model and prototype of the robot

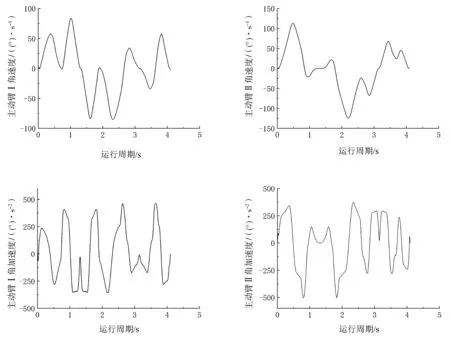
图9 主动臂运动时变关系图Fig.9 Time varying diagram of active arm motion
5 运动控制系统实现
机器人运动控制系统实现一般由硬件选型和软件设计2部分组成。本机构采用PC+运动控制卡为硬件基础的组合形式,采用Labview软件设计机器人程序控制系统。根据机器人工作控制要求,编写机器人运动控制系统程序,其界面见图10。
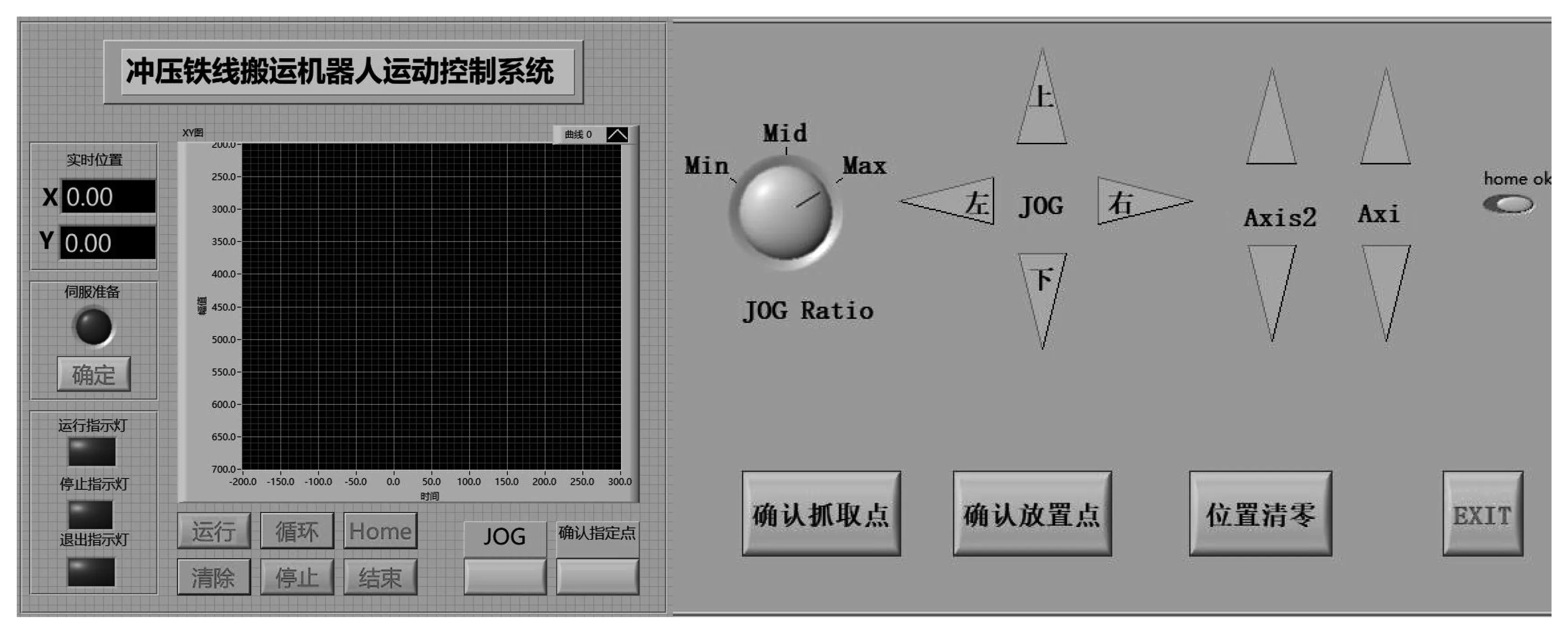
图10 运动控制程序界面Fig.10 Program interface of motion control
当程序运行后,系统在后台自动调用运动控制卡基础函数,进行程序初始化后自动设置初始参数,同时读取液压机及其他检测传感器的输入输出信号,控制机器人完成抓取动作并实时监控数据。样机试验结果表明,运动控制程序可行,达到程序控制要求。
对所设计的机器人机构核算成本并与其他常见三自由度机器人价格进行对比,见表2。从表2可见自主设计的机器人有助于企业有效降低自动化改造成本。

表2 三自由度机器人价格对比Table 2 Price comparison of the 3-DOF robot
6 结论
基于铁线冲压自动化生产线的改造,设计一款三自由度的搬运机器人,并对其进行了机械结构设计、运动学分析、工作空间分析、轨迹规划、运动学仿真分析,并通过控制程序实现等。结果表明,所设计的机器人满足自动化生产线改造需求,降低了改造成本,设计具有一定的合理性和可靠性,运动控制基本可行。
