电动助力转向系统回正控制及仿真
2020-11-04
(滨州学院 山东·滨州 256600)
0 引言
汽车在转向行驶过程中,如果方向盘不能及时回正,势必会引起驾驶安全问题。随着人们对驾驶安全要求的提高,如何提高转向性能成为了重要问题。转向控制策略是影响转向性能的关键,同时也是EPS系统研究和开发的重点,其优劣直接影响电动助力转向系统的整体性能进而影响汽车的驾驶体验。目前,关于转向系统控制策略的研究大多集中在转向性能的单向指标控制方面,对于兼顾多项性能指标的回正控制策略的硏究较少。因此,研究如何能使方向盘快速、平稳的回到中间位置的同时,减轻驾驶员的操纵力,提高汽车的回正性能具有重要意义。
1 电动助力转向系统回正模型建立
本文对电动助力转向系统在不影响系统基本结构的条件下进行简化处理,主要考虑阻尼、弹性和惯性的影响,忽略一些对转向系统的次要影响,这样不仅可以减少不必要的工作量,还能减少各个部件之间的耦合影响。想要所建模型简洁,将一些系统的机构进行合并,将EPS系统划分成以下几个部分来分别研究和建立数学模型:
1.1 电动助力转向系统数学模型
1.1.1 转向盘和转向轴
汽车转向时,方向盘首先受到力的作用,接着传递到转向轴上通过转向轴向下传递,完成这一部分传递扭矩的任务。建立转向盘和转向轴的动力学方程如下:

1.1.2 转矩传感器
本文扭矩传感器用扭力杆模型代替,通过转向轴输入和输出端的转角的变化差值与扭力杆刚度系数相乘,就可计算出转向轴的扭矩,假设所有连接都是刚性的,则转向输出轴的转角可用小齿轮的转角来代替,根据以上信息所列出的方程为:
1.1.3 助力电机
助力电机的电压方程是:

对助力电机进行受力分析,建立其动力学模型:

1.1.4 齿轮齿条机构
建模时将齿条和轮胎看做一个整体进行研究,对齿轮齿条进行受力分析,得:

1.2 回正控制数学模型
汽车转向回正时轮胎所受的力矩主要由路面与轮胎的摩擦力矩、重力回正力矩、侧向力引起的回正力矩等组成。

汽车在低速回正时,侧向回正力矩较小,轮胎与地面的摩擦阻力Tf和前轴载荷引起的重力回正力矩TG起主要作用:Td1=Tf+TG
此时由于汽车车速极低,轮胎与地面的摩擦阻力可以近似等于原地转向时所受的摩擦阻力,即

2 EPS回正控制策略的研究
2.1 回正性能评价指标
回正残余角是评判回正性能的重要指标,主动回正性能好的电动助力转向系统能够保证不同工况下都能保持较小的回正残余角,回正时间也是评价回正性能好坏的一项重要指标,相同工况下,方向盘回到中间位置的时间越短,回正性能越好。所以本文回正性能的评价指标主要是回正残余角和回正时间。
2.2 回正控制方案的设计

图1:助力特性曲线
本文设计一种算法,该算法有两部分构成,分别是模糊控制器和PID控制器,模糊控制算法设计的主要仼务是完成模糊控制器的设计,控制器的输入为目标电流和电机实际电流的偏差和偏差变化率。根据直线型助力特性曲线的研究方案,设计助力特征参数Td0、Tdmax、Imax和k(v)。其中车速感应系数k(v)的确定根据软件进行模拟,将特征车速和目标电流的值输入到MATLAB中进行指数函数的拟合,最终得到的助力特性曲线如图1所示。
3 电动助力系统回正控制仿真
3.1 电动助力转向系统及回正模块的建立
本文利用Matlab中的simulink工具箱,根据各模块的数学模型完成各个部分的搭建,经过封装后完成电动助力转向系统整体的搭建,再利用 carsim软件建立汽车模型导入到simulink中。在此基础上进行回正控制策略的优化,下图是电动转向系统整体模型:

图2:回正控制整体模型
3.2 回正控制策略仿真分析
研究控制策略的影响,我们采用的是MATLAB中的MPC Designer工具箱,直接验证回正策略的影响,下图分别为有无回正控制策略和有回正控制策略生成的曲线:
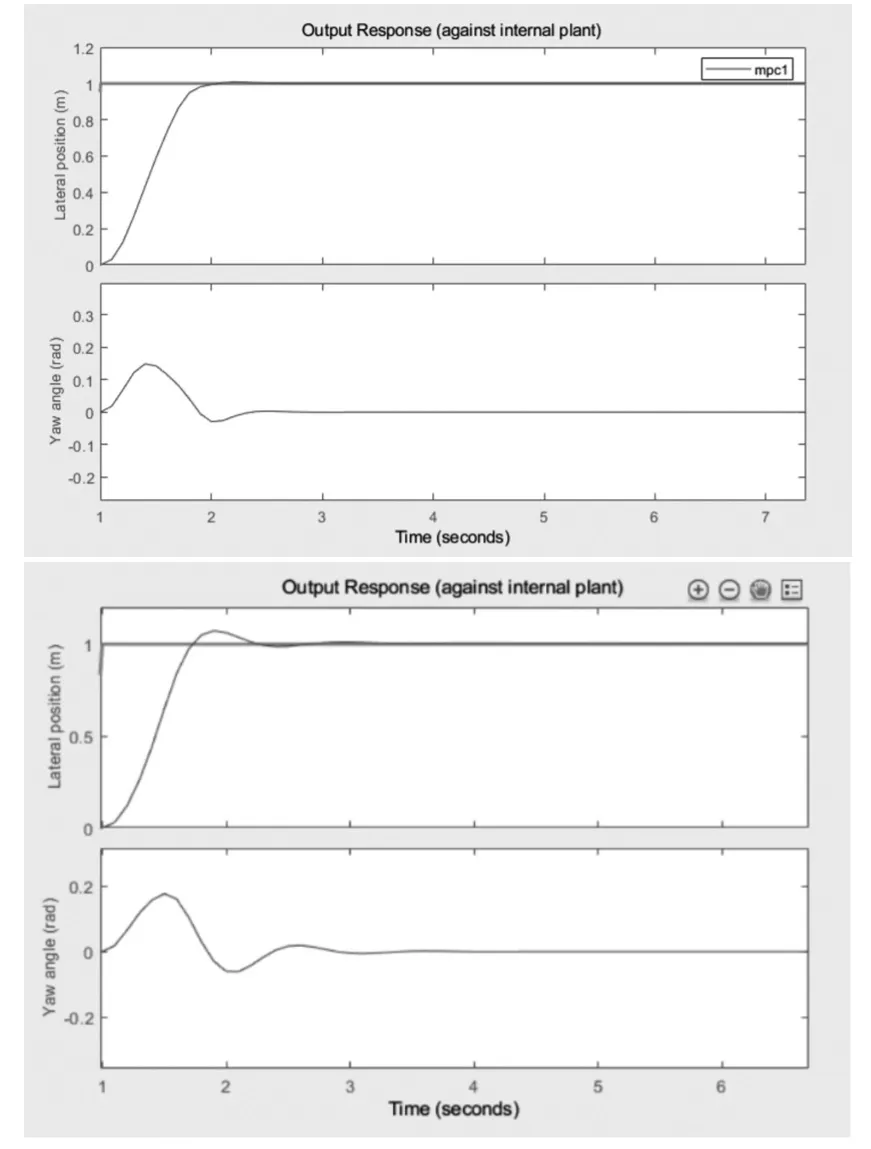
图3:有回正策略(左)与无回正策略(右)对比图
由图3可知有回正控制的电动助力转向系统在2.3秒内回正,无回正控制的电动助力转向系统回正过程需要3秒,不带回正控制策略的会出现回正不足和超调现象,所以,本文设计的回正控制策略能有效提高汽车回正性能。
3.3 回正仿真分析
本节进行不同工况下的模型性能仿真,设置速度范围为60~90km/h,横坐标为回正时间,纵坐标为回正残余角。

图4:回正仿真曲线
在速度范围为60~90km/h情况下有回正控制产生的超调量减小小很多,且回正曲线相对平稳,说明回正过程更加平稳,回正时间更短,响应更加迅速。所以,本文所设计的回正控制策略能够提高汽车的回正性能。
4 结论
控制策略研究是汽车转向系统的研究重点和难点,虽然本文在对电动助力系统的回正策略硏究方面已经达到了预期的效果,但是由于本人能力有限,有关问题还需要进一步研究:
(1)本文只硏究了EPS系统的回正控制策略,对于补偿控制和阻尼控制等有待进一步研究。
(2)建立更加准确完善的回正力矩模型,对地面和转向系统的摩擦阻力进行更精确的分析,以便得到更加接近实况的EPS系统模型。