三轴测试转台结构设计与分析
2020-10-21王晨晨

摘 要:本文介绍了一种用于天线测试的三轴重载高精度转台,转台各轴均采用双电机驱动的方式实现齿轮消隙,实现较高的定位精度。文章详细介绍了转台的技术指标及结构组成,并对传动链功率设计进行了计算校核。使用Hyperworks/optistuct软件有限元建模,对搬运器进行各工况下变形和强度的力学分析。分析结果表明,整机安全裕度符合设计指标要求。
关键词:三轴测试转台;定位精度;双电机消隙;驱动回差;
引言
高精度的重载测试转台作为关键设備,在雷达天线内场、外场标定中起着不可替代的作用,其承载能力、测角精度和定位精度直接关系到测试实验的可靠性和置信度。其中,精密三轴天线测试转台可在实验环境下模拟重型天线实际工作时的各种姿态,复现其不同姿态下的微波场特性,从而对其微波器件的功能和性能反复仿真、测试和标定,是天线近场测量的重要设备之一[1-3]。随着雷达天线阵面尺寸重量的大型化和高精度化,对测量标定转台设备的性能和精度要求也在不断提高。因此,高精度重载多轴测试转台的研究和制造,对航空航天及国防建设有重要意义[4]。
本文所述三轴转台主要为位置和随动功能转台,承载较大,为侧重静态稳态性能的角度指示型测试转台。其可承载较大负载并实现三轴大范围转动,并可在大负载下保持在空间的稳定指向;可接收上位机的控制指令,实现相应的上方位、俯仰和下方位任意位置定位或随动运动,引导被测天线精确指向目标,并可长时间锁定在该位置,以满足标校测试要求。
1.技术指标及结构系统组成
三轴测试转台由上、下方位轴和俯仰轴组成,各轴均具有定位锁定及掉电位置锁定功能。其中上、下方位轴配置导电滑环,可360?连续旋转,其它基本技术指标如下:
三轴转台主要由上方位转台、俯仰轴系和下方位转台三大部分组成。上方位转台由上台面、上回转支承、精密减速机、驱动齿轮、汇流环、双级旋变和上底座等组成;俯仰框架主要由主齿轮、中心主轴、轴承组、二级减速齿轮、限位开关、双级旋变、俯仰框架和限位挡块组成;下方位转台由下台面、下回转支承、精密减速机、驱动齿轮、汇流环、双级旋变和下底座等组成。其整体结构组成如图1所示。
2.转台结构设计及分析
三轴测试转台按照功能可分为转台结构系统和转台控制系统两部分。为了在保证转台在大负载下、任意位姿时各转轴无运动回差,各轴均采用双电机消隙的方式,有效保证转台在任意位置时均被驱动齿轮压紧,消除末级齿隙和减速机背隙等回差对转台角度定位的影响[5]。以下对各结构组成部分进行介绍:
1)上方位转台
上方位转台,使用滚子式带内齿回转支承承载,同轴安装双级高精度旋变,精度等级为0级,测角误差小于20秒。旋变下方设置有20通道的汇流环,供转台上方位旋变自身使用和转盘上器件通讯供电等使用,确保转台可360?连续旋转。为消除方位驱动齿隙,保证定位精度,使用两组电机通过精密减速器带动两个小齿轮,分别同时驱动内齿式回转支承的双电机消隙的结构。由于转台转速较低,上方位转台旋转时,主要克服摩擦力矩Mf1和额定弯矩Mp1。根据负载重量及回转支承参数等,计算上方位转动所需的总功率为P1:
代入数据计算可得:P1=0.47Kw,考虑到惯量匹配和双电机驱动效率损耗等因素,上方位电机选型为0.4Kw,两台电机可满足上方位转动需求。
2)俯仰轴系
由于俯仰轴转台的承载较大,为降低对精密减速机的输出扭矩要求,使用俯仰大齿轮配二级大小齿轮副和两组减速电机同步驱动的方式。俯仰主轴两侧贯穿左右,分别布置承载轴承、限位开关和测角双级高精度旋变。两组减速电机安装座上均设置有可调偏心套,用于调整消除末级驱动齿隙。俯仰轴系的第一级大小齿轮减速比为6:1,第二级大小齿轮减速比为3:1,机械运动的限位范围为92?~-47?。俯仰轴系转动时,主要克服摩擦力矩Mf2和额定弯矩Mp2。根据负载重量,计算俯仰轴转动所需的总功率为P2:
3.力学仿真分析
三轴测试转台在重载荷下可能引起结构的失效破坏或变形较大影响精度,因此需要对主体结构进行力学仿真分析。根据转台结构特点建立有限元模型,使用Hyperworks/optistuct软件进行有限元分析。根据负载条件要求,进行变形和强度分析,要求在以上综合载荷下,变形满足使用要求,结构不屈服且有较大裕量[6]。
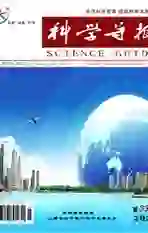
转台的力学环境条件如下:自重;俯仰0?时正向8吨载荷,或俯仰90?时4吨米弯矩载荷。分析时,结构底部约束,在上转盘台面上施加载荷,模型基座盖板等采用实体单元,筋、板类结构均采用壳单元建模,负载载荷在相应位置建立质量单元后,按重力施加,固结点采用刚性单元连接。
在8吨正向载荷下,转台基体的最大位移约0.8mm,位置在顶部台面中心处。最大应力区分布在俯仰框架与下台面连接交界位置处,约140Mpa。转台主体结构的母材使用16Mn(Q345),屈服强度为340Mpa,因此结构不会发生屈服。在安全系数2时,安全裕度仍为0.21,符合设计要求。
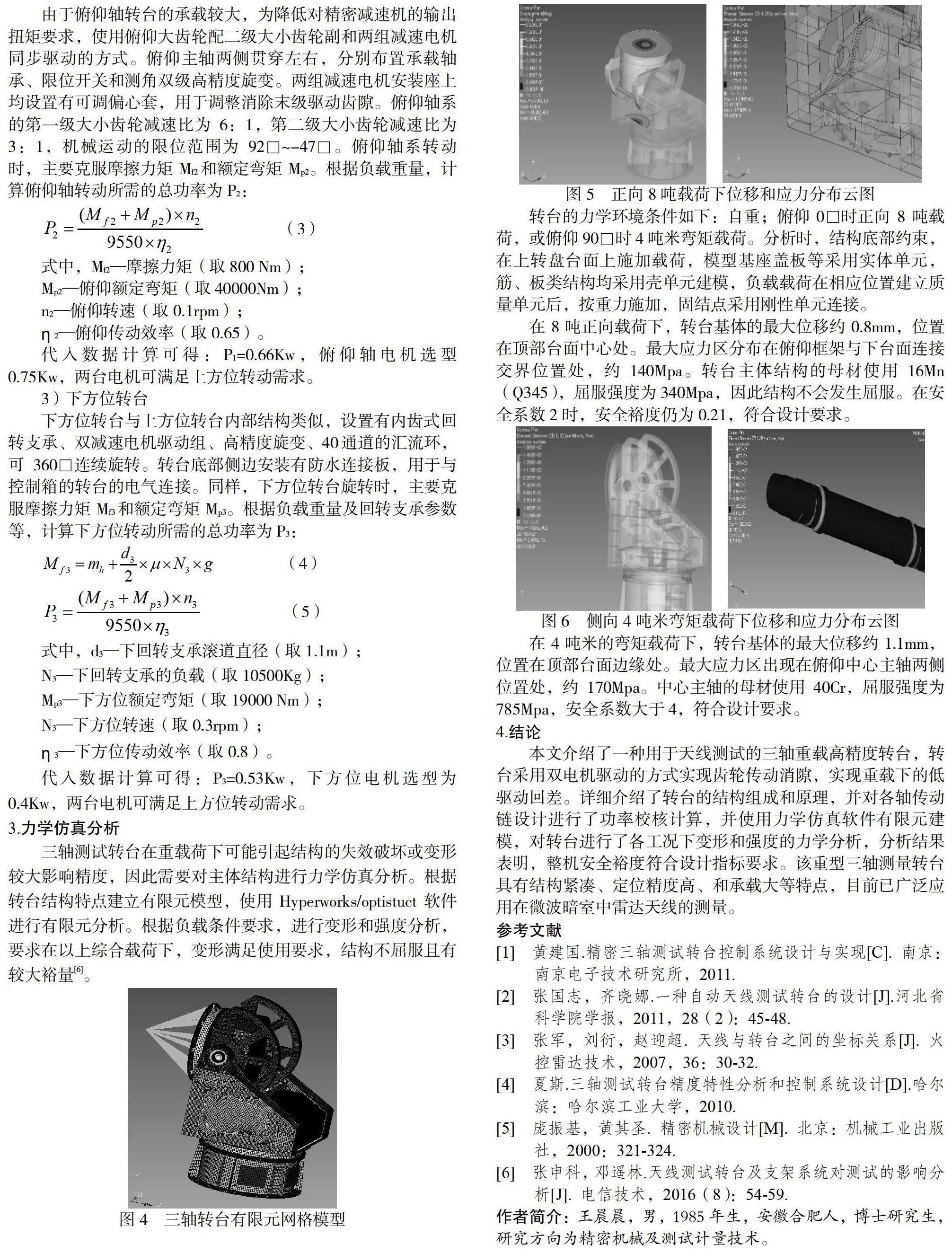
在4吨米的弯矩载荷下,转台基体的最大位移约1.1mm,位置在顶部台面边缘处。最大应力区出现在俯仰中心主轴两侧位置处,约170Mpa。中心主轴的母材使用40Cr,屈服强度为785Mpa,安全系数大于4,符合设计要求。
4.结论
本文介绍了一种用于天线测试的三轴重载高精度转台,转台采用双电机驱动的方式实现齿轮传动消隙,实现重载下的低驱动回差。详细介绍了转台的结构组成和原理,并对各轴传动链设计进行了功率校核计算,并使用力学仿真软件有限元建模,对转台进行了各工况下变形和强度的力学分析,分析结果表明,整机安全裕度符合设计指标要求。该重型三轴测量转台具有结构紧凑、定位精度高、和承载大等特点,目前已广泛应用在微波暗室中雷达天线的测量。
参考文献
[1] 黄建国.精密三轴测试转台控制系统设计与实现[C]. 南京:南京电子技术研究所,2011.
[2] 张国志,齐晓娜.一种自动天线测试转台的设计[J].河北省科学院学报,2011,28(2):45-48.
[3] 张军,刘衍,赵迎超. 天线与转台之间的坐标关系[J]. 火控雷达技术,2007,36:30-32.
[4] 夏斯.三轴测试转台精度特性分析和控制系统设计[D].哈尔滨:哈尔滨工业大学,2010.
[5] 庞振基,黄其圣. 精密机械设计[M]. 北京:机械工业出版社,2000:321-324.
[6] 张申科,邓遥林.天线测试转台及支架系统对测试的影响分析[J]. 电信技术,2016(8):54-59.
作者简介:王晨晨,男,1985年生,安徽合肥人,博士研究生,研究方向为精密机械及测试计量技术。