无人驾驶汽车感知系统零件布置
2020-08-04吕红星
吕红星
(中国第一汽车股份有限公司天津技术开发分公司)

无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的。中国自主研制的无人车——由国防科技大学自主研制的红旗HQ3 无人车,于2011 年7 月14 日首次完成了从长沙到武汉长达286 km 的高速全程无人驾驶试验,创造了中国自主研制的无人车在一般交通状况下自主驾驶的记录,标志着中国无人车在环境识别、智能行为决策和控制等方面实现了新的技术突破。文章通过研究无人驾驶自动化水平划分、感知系统零部件特点,建立无人驾驶感知零件的布置要求及方法。
1 无人驾驶汽车自动化水平划分
NHTSA(美国公路交通安全管理局)将车辆自动化水平分为 Level 0 至 Level 4[1]。
1)Level 0(无自动化):驾驶人始终完全控制车辆行驶(制动、转向、加速);驾驶人还需承担为安全驾驶所需的道路状况监视的责任。2)Level 1(特定功能的自动化),类似巡航控制、自动制动、车道保持等:转向、制动、加速当中有1 个或以上的控制功能被自动化,且各功能相互独立;驾驶人可选择将有限的驾驶操作权限交由系统控制,但仍始终拥有最终控制权,并对安全驾驶承担全部责任。3)Level 2(各功能间的复合自动化),类似自适应巡航与车道保持的联动:实现自动化的转向、制动、加速等控制功能中有2 个或2 个以上可相互协调运作;即使在该情况下,驾驶人仍拥有最终控制权、对安全行驶负全部责任,且不论发生何种情况都必须在没有提前预警时即刻接管操作权。4)Level 3(半自动驾驶):在特定环境及交通状况下,驾驶员可将所有“为确保安全的重要控制功能”交由系统控制,且对状况变化的监视也可以交由车辆完成;仅在自动驾驶模式遇到功能界限时,驾驶人才需要亲自进行驾驶操作,然而前提条件是系统拥有充足的时间将控制权交还驾驶员。5)Level 4(全自动驾驶):在行驶过程中,所有的驾驶控制、周边监视工作全部交由车辆完成;自动驾驶车辆的控制系统对行驶安全承担全部责任。
2 无人驾驶的感知系统
实现汽车无人驾驶需要汽车拥有感知系统(类似人的眼睛、耳朵)、执行系统(类似人的四肢)、控制系统(类似人的大脑)、通信系统(类似人的耳朵、嘴巴)[2]。其中感知系统包括毫米波雷达、超声波雷达、激光雷达和摄像头[3];执行系统包括制动、转向、加速;控制系统包括整车控制器;通信系统包括车联网、卫星导航等。感知系统用于感知汽车周边环境,将获得的环境信息传输给整车控制器,为整车控制器控制执行系统提供依据。
3 感知系统零部件特点
感知系统零部件的特点,如表1 所示。
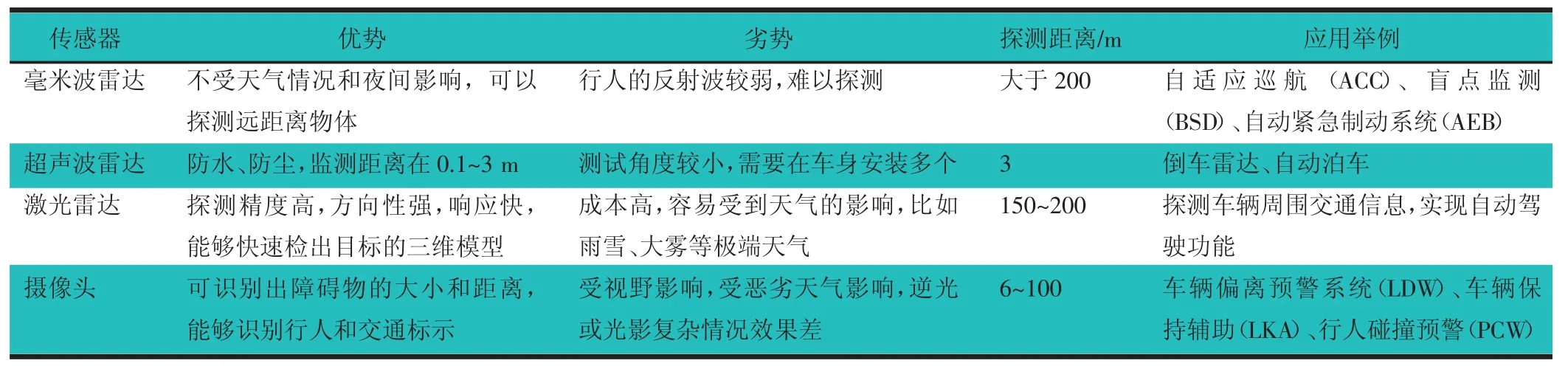
表1 感知系统零部件特点
4 感知系统零部件布置
4.1 毫米波雷达布置
正向毫米波雷达一般布置在车辆中轴线[4],外露或隐藏在保险杠内部。无法布置在中轴线上时,正向毫米波雷达与车辆Y0 平面偏移量为小于500 mm。雷达法线与路面夹角为小于5°。
侧向毫米波雷达一般布置在车辆四角,左右对称。雷达与行驶方向夹角为30°,误差范围为±3°。雷达法线与地面平行,误差范围为±3°。
毫米波雷达的布置高度(地面到雷达模块中心点的距离)一般要求在500(满载状态)~800 mm(空载状态)之间,如图1 所示。
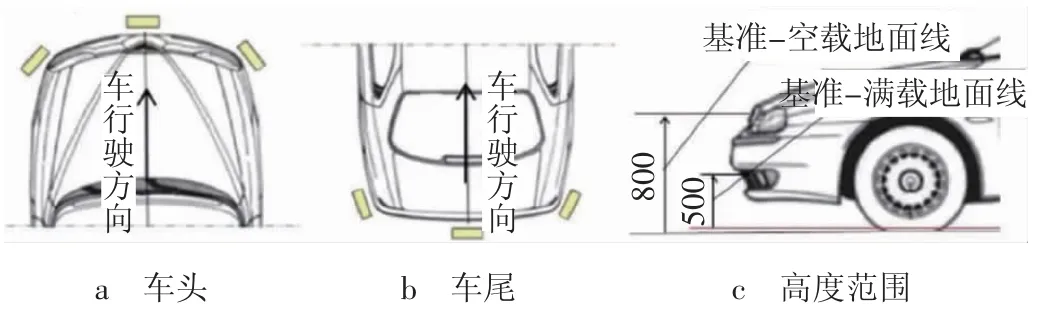
图1 毫米波雷达布置图
4.2 激光雷达布置
激光雷达的布置位置有3 种:1)激光雷达一般布置在车顶,保证开阔的探测范围。例如谷歌无人驾驶汽车。2)激光雷达布置在前大灯内,大灯的清洁装置能很好地保证激光雷达视野内的清洁。3)激光雷达布置在内后视镜底座附近,且在雨刮刮扫区域内,并保证雷达视野边缘距离刮扫边缘50 mm 以上。
4.3 摄像头布置
摄像头的布置要求为:1)布置在内后视镜底座附近,摄像头的主光轴与Y0 面的距离<50 mm。2)摄像头主光轴尽量与X轴平行,保证摄像头的有效上下视野[5]。3)摄像头视场范围内要求无遮挡,摄像头视场与前风挡玻璃的相交区域要在刮扫区域内,并距离刮扫边缘50 mm 以上,如图2 所示。
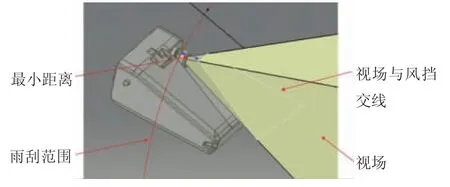
图2 无人驾驶汽车摄像头布置图
4.4 超声波雷达布置
超声波雷达探测距离小,因此超声波雷达需求数量较多,要求超声波雷达处在同一平面上,且前方无遮挡,一般裸露在保险杠上,颜色与保险杠一致,保证美观性。
5 结论
无人驾驶车辆技术的发展已经从国家层面开始推动,而且越来越多的车企和互联网公司开始投入更多的金钱和精力发展无人驾驶技术[6]。文章结合感知系统的特点,逐一介绍了感知系统零件的布置要求,可用于指导无人驾驶车辆感知系统的布置。车辆感知系统是车辆实现无人驾驶的关键,做好感知系统布置才能发挥其准确感知周边事物的功能,实现车辆无人驾驶。
