轨道车辆弓网系统主动控制研究
2020-07-04蒋苏杰杨俭杨沥孔令强周群冯婷立
蒋苏杰 杨俭 杨沥 孔令强 周群 冯婷立
摘要:列车受电弓与接触网间的接触力稳定直接影响列车的安全运行。对列车弓网系统进行主动控制是保证列车运行时弓网接触力稳定的有效方法。建立受电弓-接触网系统动力学模型,分别采用PID算法及模糊滑模控制对弓网系统进行控制。在此基础上提出一种模糊滑模自适应PID控制器。分析对比3种控制的效果,从而为研究高效智能的弓网主动控制系统提供科学理论依据。
关键词: 受电弓; 主动控制; 控制算法; 仿真
【Abstract】 The stable contact force between the train pantograph and the contact network is one of the main factors affecting the safe operation of the train. Active control of the train bow network system is an effective method to ensure the stability of the bow network contact force when the train is running. The dynamic model of the pantograph-contact network system is established, and the PID system and fuzzy synovial membrane control are used to control the bow network system. Based on this, a fuzzy synaptic adaptive PID controller is proposed. the effects of the three controls are analyzed and compared, so as to provide a scientific theoretical basis for the study of efficient and intelligent bow network active control system.
【Key words】 pantograph; active control; control algorithm; simulation
0 引 言
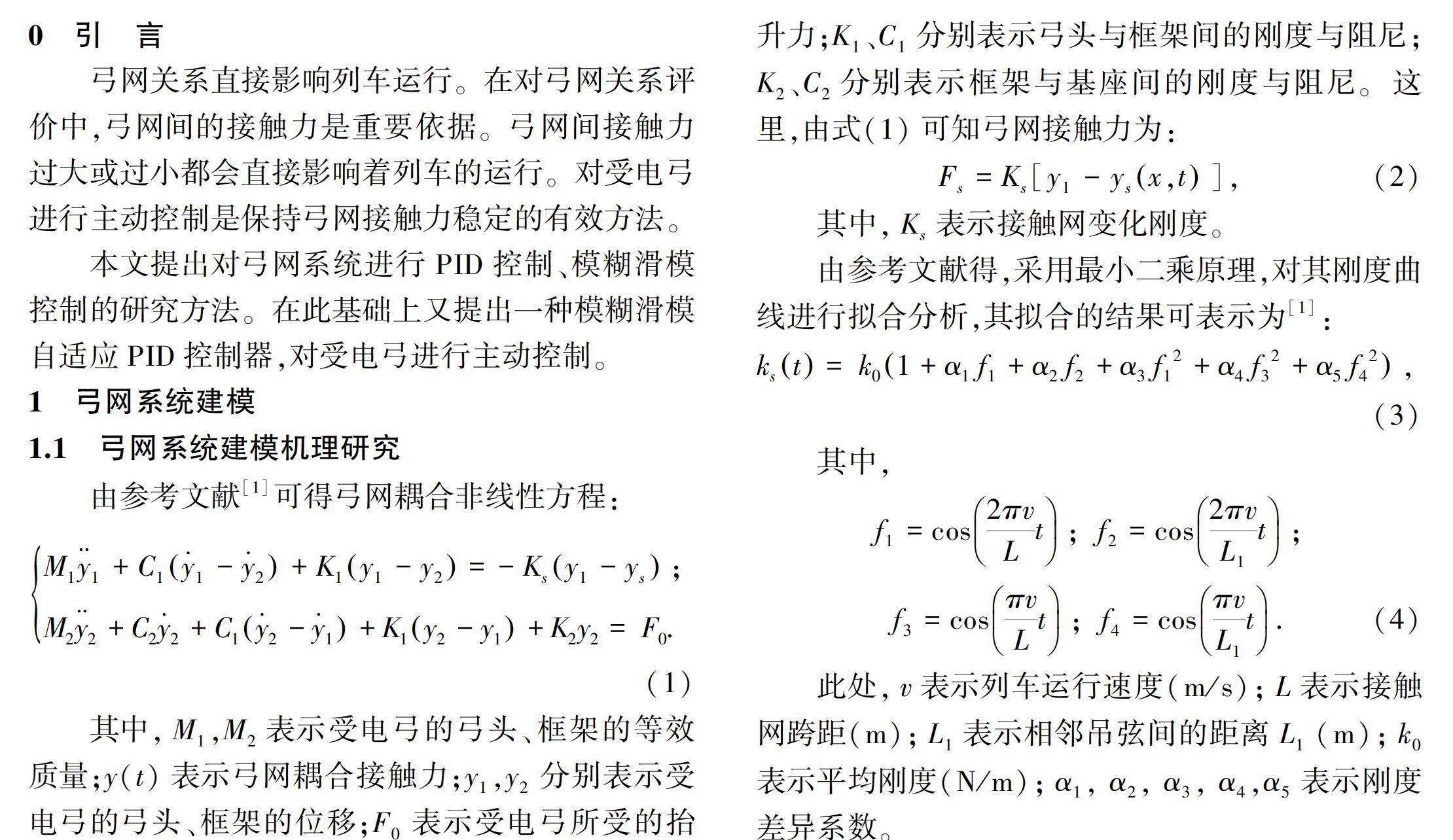
弓网关系直接影响列车运行。在对弓网关系评价中,弓网间的接触力是重要依据。弓网间接触力过大或过小都会直接影响着列车的运行。对受电弓进行主动控制是保持弓网接触力稳定的有效方法。
本文提出对弓网系统进行PID控制、模糊滑模控制的研究方法。在此基础上又提出一种模糊滑模自适应PID控制器,对受电弓进行主动控制。
1 弓网系统建模
1.1 弓网系统建模机理研究
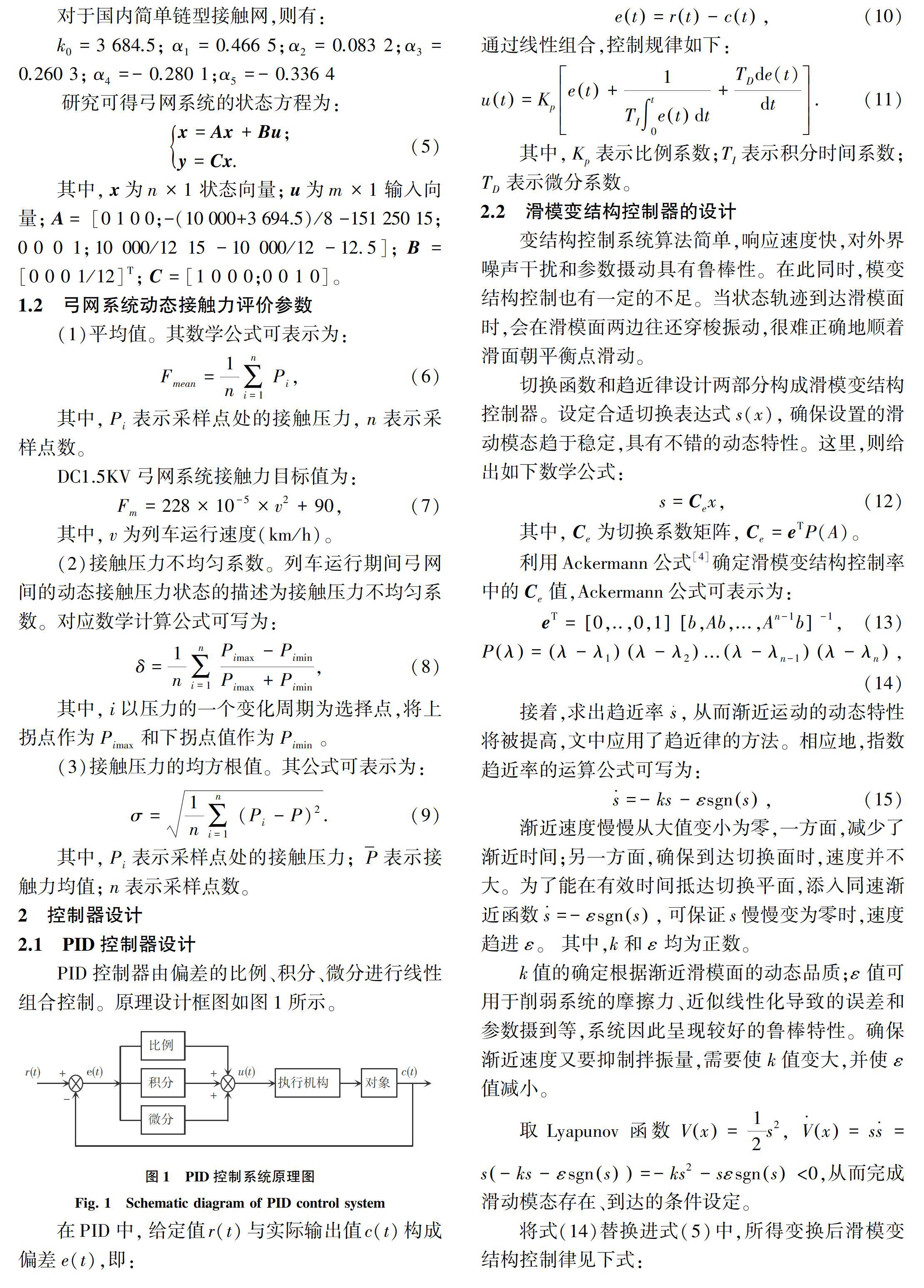
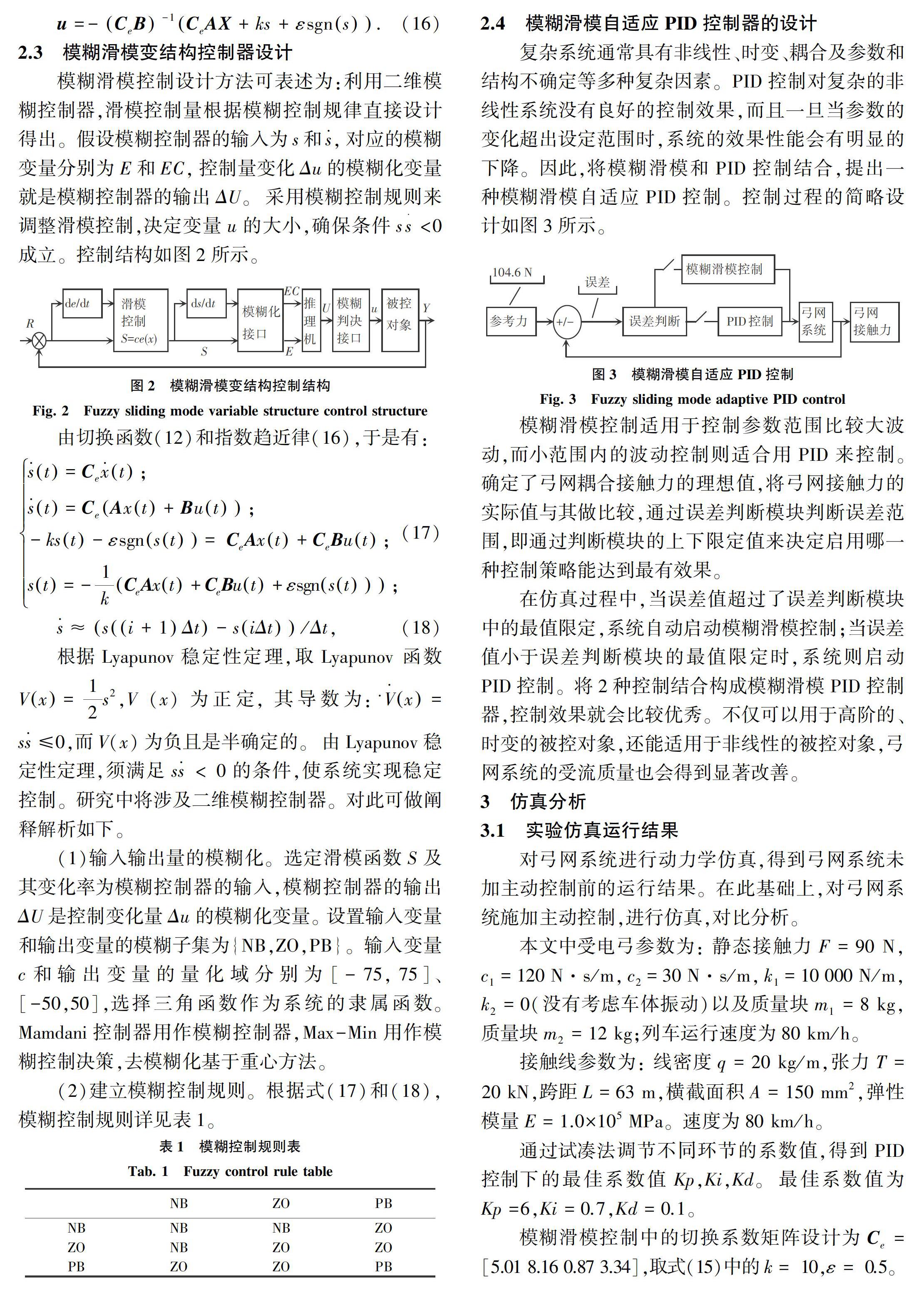
2.4 模糊滑模自适应PID控制器的设计
复杂系统通常具有非线性、时变、耦合及参数和结构不确定等多种复杂因素。PID控制对复杂的非线性系统没有良好的控制效果,而且一旦当参数的变化超出设定范围时,系统的效果性能会有明显的下降。因此,将模糊滑模和PID控制结合,提出一种模糊滑模自适应PID控制。控制过程的简略设计如图3所示。
模糊滑模控制适用于控制参数范围比较大波动,而小范围内的波动控制则适合用PID来控制。确定了弓网耦合接触力的理想值,将弓网接触力的实际值与其做比较,通过误差判断模块判断误差范围,即通过判断模块的上下限定值来决定启用哪一种控制策略能达到最有效果。
在仿真过程中,当误差值超过了误差判断模块中的最值限定,系统自动启动模糊滑模控制;当误差值小于误差判断模块的最值限定时,系统则启动PID控制。将2种控制结合构成模糊滑模PID控制器,控制效果就会比较优秀。不仅可以用于高阶的、时变的被控对象,还能适用于非线性的被控对象,弓网系统的受流质量也会得到显著改善。
3 仿真分析
3.1 实验仿真运行结果
对弓网系统进行动力学仿真,得到弓网系统未加主动控制前的运行结果。在此基础上,对弓网系统施加主动控制,进行仿真,对比分析。
本文中受电弓参数为: 静态接触力F=90 N,c1=120 N·s/m,c2=30 N·s/m,k1=10 000 N/m,k2=0(没有考虑车体振动)以及质量块m1=8 kg,质量块m2=12 kg;列车运行速度为80 km/h。
接触线参数为: 线密度q=20 kg/m,张力T=20 kN,跨距L=63 m,横截面积A=150 mm2,弹性模量E=1.0×105 MPa。速度为80 km/h。
通过试凑法调节不同环节的系数值,得到PID控制下的最佳系数值Kp,Ki,Kd。最佳系数值为Kp=6,Ki=0.7,Kd=0.1。
模糊滑模控制中的切换系数矩阵设计为[WT5HX]C[WT5BX]e=[5.01 8.16 0.87 3.34],取式(15)中的k=10,ε=0.5。
由此可得PID控制、模糊滑模控制与模糊滑模自适應PID控制仿真结果如图4~图8 所示。
3.2 仿真结果分析与总结
当列车运行速度为80 km/h时,可得仿真数据分析结果见表2。
由表2可得,弓网模型在经过PID、模糊滑模控制、模糊滑模自适应PID下,接触力评价参数均得到有效提升,接触力更加稳定。研究可得剖析论述如下。
(1)对系统进行主动控制后,弓和网之间动态接触力状况得到明显改观。从仿真结果来看,接触力平均值情况得到改善,原系统的接触力均值为83.5 N,经过PID、模糊滑模控制、模糊滑模自适应PID三种主动控制增大为85.1 N,88.8 N,93.3 N,更加接近于该速度下的经验值104.6 N;最小值得到有效提高,从控制前的41.9 N增加到44.2 N、49.2 N、56.9 N;最大值得到有效降低,从179.0 N下降到147.3 N、139.7 N、127.7N。接触力均方根和接触力不均匀系数也得到了有效降低。均方根从33.5下降到26.2、25.9、18.7,下降率分别为34.5%、33.3%、38.3%;不均匀系数从20.9下降到13.3、11.9、12.3,下降率分别为49.8%、65.5%、66.8%。
(2)在3种主动控制下,从各种评价指标上来看,模糊滑模的控制效果要优于PID控制,模糊滑模PID比模糊滑模控制具有更好的控制效果。3种主动控制方法都有效地改善了弓网间接触力的波动。
4 结束语
列车弓网关系的稳定直接影响列车的安全运行。而弓网间接触力的稳定则尤为关键。比较上述3种控制算法结合接触力评价指标可以得出结论:对于列车弓网系统,施加主动控制能够极大提高弓网系统的稳定性。对比分析3种控制器可发现,PID、模糊滑模控制及模糊滑模自适应PID的控制效果依次提高。为研究高效智能的弓网主动控制系统提供科学理论依据。
参考文献
[1] 郭京波. 高速机车受电弓稳定受流与控制研究[D]. 北京:北京交通大学,2006.
[2]乔枫,郭慧佳,李界家,等. 二级倒立摆系统的模糊滑模变结构控制[J]. 沈阳建筑大学学报(自然科学版),2010,26(4):792.
[3]崔营波. 高速列车受电弓半主动控制方法研究及应用[D]. 北京:北京交通大学,2018.
[4]刘浩,钱存元,施招东. 基于模糊自适应PID控制的ATO系统控制算法[J]. 城市轨道交通研究,2017(3):40.
[5]孙磊,孙冬梅,袁倩,等. 基于模糊滑模变结构的磁轴承振动控制研究[J]. 科技通报,2018,34(9):186.
[6]张兆东,徐小亮,杨杨,等. 基于模糊PID控制策略的液压缸试验台加载系统设计[J]. 南京理工大学学报,2019,43(1):78.
[7]張红,徐海军,刘淑荣,等. 基于改进模糊PID控制的循环水优化仿真[J]. 电气应用,2014,33(24):134.
[8]GUAN Kaizhong, LUO Zhiwei. Stability results for impulsive pantograph equations[J]. Applied Mathematics Letters, 2013, 26(12): 1169.
[9]刘浩,钱存元,施招东. 基于模糊自适应PID控制的ATO系统控制算法[J]. 城市轨道交通研究,2017(3):40.
[10]郭桂林. 高速受电弓控制系统研究[D]. 成都: 西南交通大学, 2014.
[11]韩南南. 基于接触网动力学参数变化的弓网系统振动特性研究[D]. 上海:上海工程技术大学,2016.
