蝴蝶形光纤传感器挠度监测方法研究
2020-06-07裴辉辉
裴辉辉
(合肥工业大学 土木与水利工程学院,安徽 合肥 230009)
0 引 言
挠度作为最能够反映桥梁受力情况、评估桥梁质量、分析桥梁潜在问题的重要参数之一,无论是在施工阶段还是运营过程中,都是监测的重点。研究适用于桥梁挠度的长期实时监测系统,对桥梁动态挠度变化进行长期实时监测,以避免发生具有渐变性质的重大安全事故,同时为桥梁的日常管理养护提供参考和依据,具有重要的工程实用价值。
目前常用的挠度监测方法有水准仪法[1]、GPS法[2]、光电成像法[3]、连通管法[4]等。水准仪法是利用水准仪和水准尺来测量,根据水准仪前后两次读数的差值求得两点间的高差。该方法设备安装较为复杂、受气流和车辆振动影响较大。GPS法是利用全球定位系统对桥梁的线形进行监测,定位速度快精度高,但是成本较高,仅适用于特大型桥梁。光电成像法是利用测点上的激光发射器与参考点的接受器之间的相对位移感知桥梁挠度变化,该方法测量精度易受恶劣气候环境的影响,设备成本较高。连通管法是利用连通管原理,将桥梁挠度的变化转化为连通管内液体高度的变化。该方法单独使用较为困难,需要与其他传感器结合使用,结构复杂且造价昂贵,不便于推广。
结合现有挠度监测方法的不足,研究者提出了基于强度调制原理[5]的蝴蝶形塑料光纤位移传感器挠度监测方法。该传感器的传感元件如图1所示,当蝴蝶形光纤位置固定而G点发生位移时,蝴蝶形光纤的几何形状将随之发生改变,进而导致光纤出射端光功率的变化。因此,本传感元件通过对蝴蝶形光纤几何形状变化引起的光功率损耗进行调制,使G点位移与蝴蝶形光纤光功率损耗一一对应,以此实现对待测点位移的连续自动测量[6-8]。

图1 蝴蝶形光纤位移传感器的传感元件示意图
为满足挠度监测系统的可靠性、耐久性、精确度等要求,同时降低监测方案的造价,便于传感器加工安装,本文尝试采用韧性、稳定性以及灵敏度都十分优异的塑料光纤作为传感元件[9],研发基于强度调制原理的蝴蝶形位移传感器挠度监测系统。该系统不仅能为桥梁挠度的长期自动、多点同步测量提供一种简单易行、稳定可靠且成本较低的解决方案,同时也是基于全桥结构健康监测系统的重要组成部分,具有十分重要的工程实用价值和学术研究意义。
1 蝴蝶形光纤传感元件
1.1 传感原理
通常,未经处理的光纤的灵敏度不足以检测结构弯曲的变形。为了提高光纤对曲率的敏感度,将传感区域光纤缠绕成蝴蝶结形状。蝴蝶形光纤可以敏锐检测到其几何形状变化导致的光功率损耗。本文作者正是利用这一特性,将蝴蝶形传感元件作为弯曲调制结构,设计出完整的蝴蝶形光纤位移传感器,如图2所示。在传感器中,光从光源发射,沿弯曲的蝴蝶形传感元件传输。当外力作用于传感元件引起G点下降时,将带动传感元件几何形状的缩小,同时将G点位移转化为蝴蝶形光纤几何形状的改变,进而引起光纤出射端光功率的变化[10]。最后通过出射端连接的光功率计和计算机将光信号转化为电信号并对电信号进行解析与保存。因此G点产生下降位移所引起的光功率损耗即为位移下降前后两次光功率计记录数据的差值,具体可表示为:
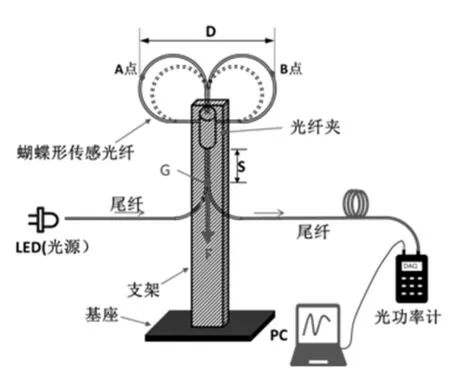
图2 完整的蝴蝶形光纤位移传感器示意图
(1)
1.2 蝴蝶形光纤位移传感器的传感元件位移标定实验
为了验证所设计传感器的可行性、稳定性,确定其的位移量程和精度,进行了传感器的校准实验。实验过程中,将光纤缠绕成蝴蝶结形状(D=12 cm),搭建光纤传感链路,传感元件通过POF尾纤连接到光源和光功率计。记传感器初始宽度D=12 cm时为初始状态,记录初始状态光功率计数值L0。沿图示方向缓慢拉动G点处光纤向下移动增加位移S。G点每下降5 mm,记录一次对应光功率数值,分别为L1、L2、L3…Li,直至传感元件达到其最大位移(传感元件形状不能继续缩小时)。操作过程中,位移每下降一次,静置30 s待传感器示数稳定后记录光功率计数值。在上述操作完成后再上拉G点至初始状态。同样,G点每上升5 mm,记录一次相应光功率值。位移的每次下降和上升构成一个完整的循环,重复操作3次。
按照下列公式,处理得到的数据:
(2)
其中,光功率损耗的单位为db,位移下降单位为mm。以3次上升和下降光功率损耗的平均值α作为纵坐标,位移变化S作为横坐标,得到光纤下滑位移S和光功率损耗α之间的响应曲线。采用指数函数对实验数据进行拟合,实验结果如图3所示。

图3 传感器位移与光功率损耗响应曲线
根据位移与光功率损耗之间的响应曲线可以看出,在传感器位移范围内(0~130 mm),蝴蝶形光纤传感器的光功率损耗随位移的上升(下降)而增加(减小),两者呈指数级关系。实验数据的拟合曲线解析式为:
αc=0.008 5·[EXP(0.036 116·S)-1]
(3)
拟合曲线相关系数R2越接近于1,说明拟合效果越好。因此,本次实验拟合曲线的相关系数R2为0.998 97,说明该曲线可以作为蝴蝶形光纤位移传感器的位移标定曲线。
2 蝴蝶形光纤传感器挠度监测系统
根据上节位移标定实验结果,可知传感器的精度及稳定性主要取决于传感元件的设计。本节将蝴蝶形光纤传感元件应用于简支梁挠度测量中,搭建一套结构简单、制造方便、灵敏度高、支持远程传输的蝴蝶形光纤传感器挠度监测系统应用于简支梁挠度监测中,为桥梁挠度的长期自动、多点同步测量提供一种简单易行、稳定可靠且成本较低的解决方案。
2.1 蝴蝶形塑料光纤位移传感器挠度监测系统的搭建
如图4所示,使用强度较高的铝合金简支梁模拟桥梁挠度变化。在实验装置搭建过程中,将长3 m的简支梁架在2个简易支座上,分别在简支梁的L/4、L/2和3L/4处搭建3个蝴蝶形光纤位移传感器组成挠度监测系统。传感器紧贴简支梁边缘放置,使用502胶水将G点处光纤与简支梁连接在一起。作为实验结果的对比,将直线位移传感器(LVDT)紧贴安装在简支梁底部,接通光源、光功率计、计算机等实验设备。
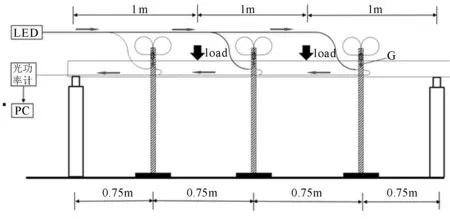
图4 简支梁挠度测量实验示意图
2.2 挠度测量实验及结果
实验加载过程中,分别在简支梁L/3和2L/3处增加荷载。本实验选择规格为2 kg的标准砝码按照每级2×2 kg在简支梁L/3和2L/3处对称逐级加载,荷载等级一共14级,从2×2 kg~2×28 kg依次增加砝码。每次加载完成静置30 s待传感器示数稳定后再记录加载等级、简支梁挠度、光功率计示数等数据。加载完成后再按照同样程序逐级卸载直至荷载为零。加载和卸载2个阶段构成1个完整的测量周期。为减小误差,共进行3个周期的挠度测量实验,取3个周期实验数据的平均值作为待测点挠度数据输出。实验结果见表1。
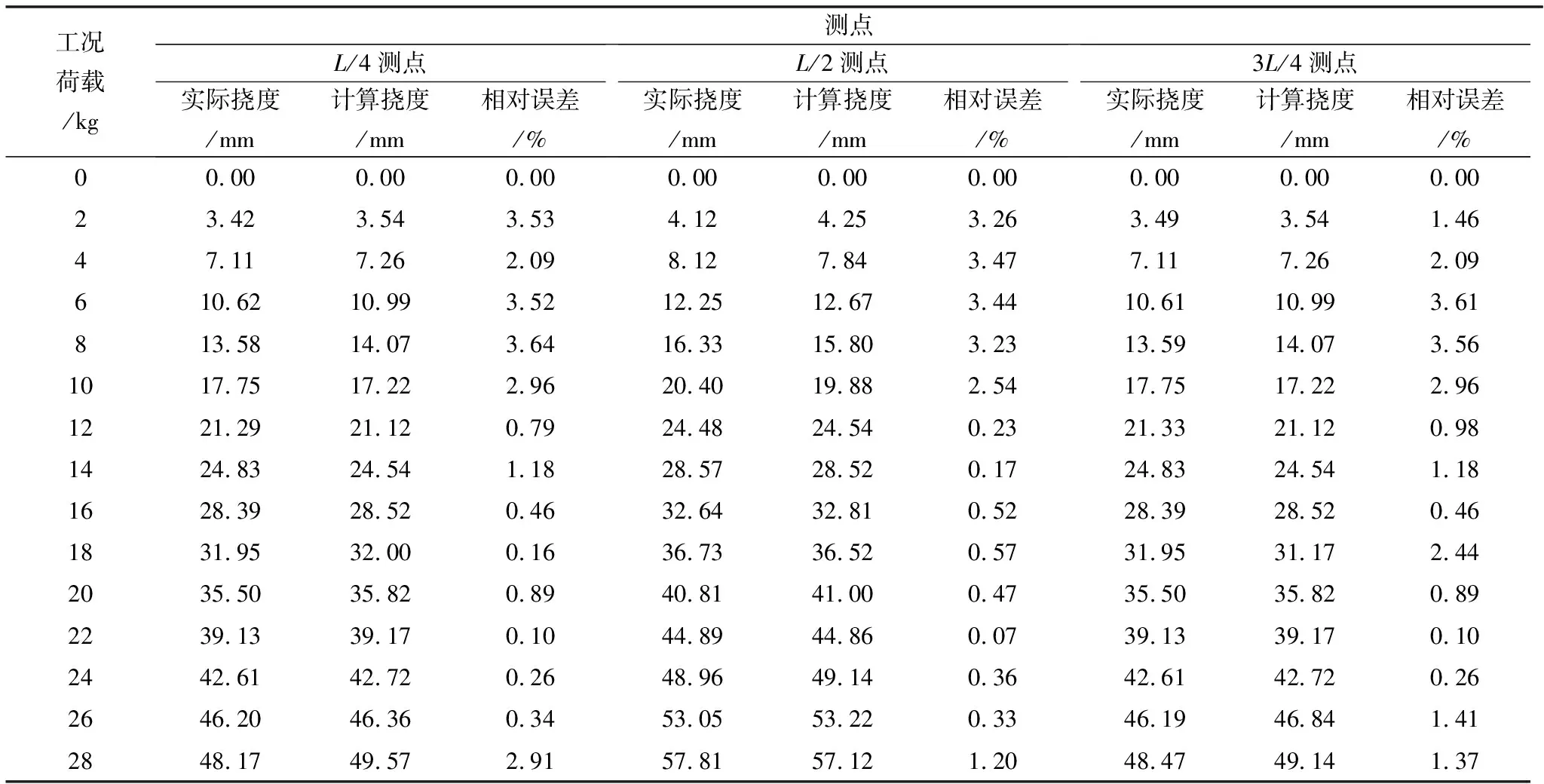
表1 三个测点挠度测量结果对比
由表1中简支梁挠度监测实验数据的对比可以看出:随着荷载等级的增加,根据蝴蝶形光纤传感器的输出光功率损耗得出的计算挠度与LVDT测量的实际挠度基本一致。加载过程中,在简支梁L/4、L/2和3L/4位置的3个待测点上,计算挠度与实际挠度之间的误差均较小,绝对误差小于1.5 mm,最大相对误差仅为3.64%。进一步分析可知,L/2处测量结果的平均误差为1.32%,小于其他2个测点平均误差(L/4和3L/4处平均误差分别为1.52%和1.51%)。这可能是由于挠度变形时,简支梁跨中测点除挠度外无转角产生,而其他两个测点产生转角影响了测量精度。经过深入分析认为,边跨测点误差较大的问题可以通过优化传感器与简支梁的接触方式加以解决。
3 分析与结论
扰度是桥梁质量鉴定和健康安全状态评估的重要考核指标,它直接反应桥梁的整体刚度、承载能力和整体稳定性。因此,合适的挠度监测方法对完善桥梁结构健康监测系统具有十分重要的意义。本文研发的蝴蝶形光纤位移传感器挠度监测系统可以不受桥梁现场的尘埃、雾气、湿度以及桥梁下部水位和交通情况等周围环境的影响,适用于各种桥型的挠度测量,且无须额外参考点、安装简单、造价低。在简支梁挠度测量实验中,挠度监测结果与实际挠度发展趋势基本一致,该系统测量误差为mm级,相对误差控制在4%以内,能够满足桥梁工程挠度测量的要求。