我国汽车巡航控制系统的发展现状及发展前景
2019-10-21郭佳
郭佳
摘 要:现如今,我国的汽车巡航控制系统紧跟时代发展,走向智能化。本文主要论述了我国汽车巡航控制系统当前的发展状况,并在此基础上对汽车巡航系统未来的发展提出建议和意见。
关键词:我国汽车巡航控制系统;发展现状;发展前景
1 引言
随着我国经济的逐渐发展,汽车走进了千家万户。汽车带给人们便利的同时,也对我们的环境造成了严重的污染。于是,人们将对汽车的研究方向从难以提高的内燃机工作效率,转移到汽车巡航控制系统上。期望保障汽车的稳定行驶,减少人为驾驶的不规范导致的油耗增加,污染加重。同时,更重要的是将驾驶员从驾驶中解放出来,缓解驾驶员的驾驶疲劳,提高驾驶的舒适性,从而降低驾驶疲劳的事故率。
2 汽车巡航控制系统
汽车巡航控制系统是由车载ECU控制,通过传感器实时监测当前车况和行车环境,并根据当前车况控制节气门开度和刹车制动器,调节车速的大小,从而满足当前汽车行驶需求。
汽车巡航控制系统最早起源于20世纪40年代,由美国盲人发明家所发明,并逐渐应用于汽车,一直发展至今,而国内相比于国外的发展要慢上许多,在20世纪90年代开始逐渐对汽车巡航进行研究。随着技术的不断突破,智能化的兴起,我国紧跟时代潮流,大力发展智能化,使智能化应用于各行各业,于是无人驾驶概念的提出,极大的促进了我国汽车巡航控制系统的研究发展。在对汽车人才的培养上,各高校已将汽车巡航系统的学习加入到高校相关专业的课本里,并伴有相关的课程设计,使学生对汽车巡航有初步的认知和把握,为未来的工作研究打下良好的基础。
3 我国汽车巡航控制系统的发展现状
无人驾驶是近年来的热门话题,作为无人驾驶技术的核心技术之一的汽车巡航控制系统,也成为了各大高校和研究所的热门研究内容。
3.1 控制系统的完善
东北林业大学针对汽车巡航控制在行驶过程中存在的汽车加减速和安全性、舒适性等多个性能指标不协调的问题,提出了一种基于模型预测控制和最优控制的控制算法。通过根据本车和前车纵向运动学特性,建立了车辆和前车的逆纵向运动模型,并将多性能指标量化,将含有多个变量的目标函数转化为一维极值问题,提出极值MPC算法。经仿真模拟实现其目标,在保证安全性的情况下,具有更高的舒适性和快速性。[1]
汽车在行驶过程中会由于大风、道路颠簸等非线性、不确定性环境因素的影响使得汽车巡航系统建立的参考模型往往会十分的不准确,极大的影响汽车巡航系统的功能性。因此东北林业大学针对非线性系统等效线性化方法的不足,提出通过建立汽车纵向动力学模型和模糊控制理论设计ACC系统并采用MATLAB/Simulink验证,得出该方法能够实现汽车的自适应巡航功能,并保证良好的跟踪性、安全性和适应性。[2]
3.2 行车环境的感知
针对在行车过程中弯道处目标车辆的丢失或混乱的问题,文献[3]采用应用扩展卡尔曼滤波理论进行巡航系统前方弯道关键目标识别研究,建立非线性三自由度车辆模型,设计了横摆角速度的扩展卡尔曼滤波器,实现了道路曲率的在线实时估计。建立弯道目标识别模型,并采用模糊控制理论,设计多目标换道模糊逻辑控制器,确定关键目标车辆,并利用MATLAB/Simulink仿真验证,得出了该方法能有效识别弯道处的目标车辆。[3]
在安全车距的设计上,文献[4]采用H理论设计了线性参变间距控制算法,并采用线性参变模型描述了车辆与前车的相对运动特性,通过加速度限值抑制了控制輸入饱和且改善了驾驶的舒适性。[4]
近几年随着车联网的发展,和相关的标准的完善,文献[5]提出了一种基于车联网的汽车巡航控制系统,开发了一种分层式控制策略,在上层控制中将汽车的传感器发送的本车速度、加速度和车间通信模块发来的前车车距、速度、加速度等信息进行采用加速度前馈加误差反馈控制算法分析,由下层的执行机构控制层对汽车进行实时控制。实现汽车巡航。经仿真和整车试验表明:该控制策略可以实现快速准确响应,但是当汽车时间距较小时,会发生较大的误差。虽然有一定的局限性,但是它对实现更小的跟车间距的准确性提供了一种可能。为未来的车联网巡航系统的发展奠定了基础。[5]
3.3 驾驶员行为特性研究
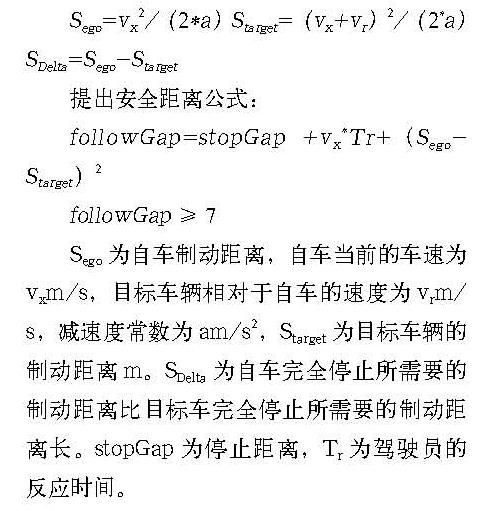
文献[6]基于驾驶员行为跟车行为特性开发了新型的自适应巡航算法,通过对驾驶员跟车行为特性的研究比较市面通用的决策算法,指出了通用算法的不完善提出了新型算法。
Sego为自车制动距离,自车当前的车速为vxm/s,目标车辆相对于自车的速度为vrm/s,减速度常数为am/s2,Starget为目标车辆的制动距离m。SDelta为自车完全停止所需要的制动距离比目标车完全停止所需要的制动距离长。stopGap为停止距离,Tr为驾驶员的反应时间。
经仿真和实车验证,发现模型能够较好地拟合跟车过程,可用于自动驾驶或者自适应巡航系统的跟车距离决策,并且通过特征参数调整获取不同驾驶/乘坐习惯,使巡航系统更加符合驾驶员跟车习惯,提高驾驶舒适性。[6]
4 我国汽车巡航控制系统的发展前景
随着我国人民对生活出行质量的要求逐渐提高,汽车行业又迎来新的发展前景,加快推进汽车巡航控制系统的研究发展,已是汽车行业发展不可或缺的关键一步。以下是对汽车巡航控制系统未来发展的初步展望。
4.1 控制算法的研究
汽车驾驶过程要使汽车针对不同的情况有着相对应的准确反应。这需要各个车用传感器实时传输数据,但随着行驶条件的复杂化,车况数据也愈发复杂,存在着诸多变量。这就需要系统的控制算法能及时分析处理数据,并发出相应的指令,对汽车进行调整。因此新算法的研究对于巡航系统的发展至关重要。
4.2 加强汽车通讯技术,实现汽车互联互通
传统的汽车通过传感器来监测当前车况,与周围车辆信息,但相比于传感器,利用无线通讯与周边车况汽车实现互联互通,获得车辆的驾驶信息,丰富的行车数据使得系统对汽车的控制更加的精准,可靠。
4.3 建立故障预警、处理机制,提高系统的安全性
从2012年发生的丰田汽车巡航失控,到2018年发生奔驰车巡航失控和东风标致巡航失控,这些事故,无不在提醒我们在对汽车巡航技术满怀期待的同时,也要加强巡航系统的稳定性、安全性和对系统故障预警、处理机制的建立,保障行车安全。
4.4 尝试人工通用智能实现汽车的无人驾驶
近日,清华研发的天机芯引发了人工智能界的轰动,它作为人工智能的两种主流研究的融合,为实现人工通用智能(AGI)奠定了坚实的基础。因此大力推动AGI的发展有利于更好地实现汽车的无人驾驶技术。
5 结语
智能化时代的到来对汽车巡航控制系统的发展既是机遇又是挑战,人工智能无人驾驶的兴起,给予了汽车行业巨大的发展前景。汽车巡航系统作为汽车电控的核心技术之一,具有很大的潜力和市场,将来一定是作为评估汽车性能好坏的一个重要的参考依据。因此,抓住时代机遇、勇于创新,不断完善、持续发展,将会为汽车行业的发展提供源源不断的动力。
参考文献:
[1]凌滨,宋梦实,邢键,等.汽车自适应巡航系统的多性能指标控制算法[J].机械科学与技术,2018,37(5):690-697. DOI:10.13433/j.cnki.1003-8728.2018.0506.
[2]凌滨,宋梦实.汽车自适应巡航系统车距控制策略研究[J].计算机仿真,2017,34(11):143-148. DOI:10.3969/j.issn.1006-9348.2017.11.030.
[3]陈学文,刘伟川,张进国,等.汽车巡航系统前方弯道关键目标识别研究[J].现代制造工程,2017,(7):80-84,120.DOI:10.16731/j.cnki.1671-3133.2017.07.016.
[4]高振海,严伟,李红建,等.汽车自适应巡航线性参变间距控制算法[J].吉林大学学报(工学版),2016,46(4):1023-1029. DOI:10.13229/j.cnki.jdxbgxb201604002.
[5]魏守洋,邹渊,李晓良,等.车辆联网巡航控制研究[J].汽车工程,2018,40(3):290-296. DOI:10.19562/j.chinasae.qcgc.2018.03.008.
[6]刘伟,卫璐,孙芳岑,等.基于驾驶员实际跟车特性的自适应巡航系统研究[J].北京汽車,2018,(3):1-3,28. DOI:10.14175/j.issn.1002-4581.2018.03.001.
