基于行车安全与无人驾驶的线形优化
2019-09-10赵春长闻成维郑晖
赵春长 闻成维 郑晖


【摘要】:经过研究发现,传统的道路线形设计并不满足汽车重心行驶轨迹的曲率变化率连续这一条件,继而易引发驾驶员不舒适,严重的情况下甚至危及行车安全。为充分保证车辆在行驶时的安全感以及舒适性,并使道路线形更好的服务于无人驾驶技术,采用样条函数曲线对道路线形进行拟合设计,使之满足曲率变化率连续。本文介绍借助EICAD构建道路线形,采取拟合点坐标,利用origin进行线路拟合,分析误差,论证拟合函数的可行性,得到拟合样条曲线,使其与现有的道路设计模式相结合,来运用于无人驾驶汽车行驶路径决策中。
【关键词】:道路线形优化设计;车辆行驶轨迹;交通安全;样条函数曲线;无人驾驶
中图分类号:U412.3 文献标志码:A
引言
当前世界正飞速发展,中国的城镇现代化进程也不断加快,道路交通系统在大部分地区的各个方面的发展都有着巨大的影响。而道路设计作为道路交通系统中的骨架自然起到了决定性的作用。新时代的道路不仅能连通两个区域,还能容纳相应的交通通行量、体现优美顺畅的线性、具有行车指向性,除此之外,它还应与周边环境相互协调、适应,符合时代可持续发展的理念,且对交通智能化的要求也进一步提高。现今无人驾驶技术也快速发展,当无人驾驶汽车行驶在弯道上时,要不断地识取弯道上车道线等特征,对不规则的线形,汽车大脑系统也难以选择出合适的路径行驶,因而无人驾驶技术对道路的线形的要求也将会更高。
线形设计在道路设计和运营的整个过程中起着非常重要的作用,是其中最为核心的一部分。目前,我国道路仍然采用直线、缓和曲线、圆曲线等传统的道路线形组合来进行道路线形设计。这种方法在路线设计过程中,道路和城市道路的路线会受到许多客观因素的影响,如自然地理、社会经济和技术条件等。[1]为使车辆行驶更加安全,并使道路线形更好服务于无人驾驶技术,有必要确保车辆的轨迹与道路的线形设计相匹配。因此,从这个角度出发来设计出一个良好的道路线形方案,使之确保线形具备更为合理的技术性和经济性,且能运用于无人驾驶技术中。
1 道路线形现状存在的问题
目前,城市道路和公路的主要服务对象是汽车,因此道路设计的主要依据是对汽车行驶规律的研究,而在道路平面设计过程中,主要考虑车辆的行驶轨迹。当道路线形设计与车辆的行驶轨迹一致时,能进一步满足行车的安全与顺畅,而在一些高等级道路的设计中对这方面的要求就显得尤为重要。如果道路线形不满足车辆行驶轨迹的几何特点,将容易导致车内人员不舒适,甚至危及行车安全。
现阶段研究表明,车辆在行驶中,其重心轨迹在几何特性方面具有以下特征:
(1)轨迹是连续的、并且也是圆滑的;
(2)轨迹的曲率是连续的,即在轨迹上任何一点上都不会有两个曲率值;
(3)轨迹的曲率变化率是连续的,即在轨迹上任意一点都不会有两个曲率变化率值。[4]
以前的低等级公路平面线形大多采用直线和圆曲线组成,但其仅符合汽车行驶轨迹特性(1),达到了车辆转向和直行的要求,但不满足(2),两个不同的曲率值出现在了直线和圆曲线的切点处。如今汽车数量的增多以及行驶速度的提高,引入了一条曲率变化连续的缓和曲线,来连接直线和圆曲线,使得整条线形符合了(1)、(2),但仍不符合(3),在缓和曲线与直线,圆曲线和缓和曲线的连接点上发生了曲率变化率突变。因此,当前需要一条满足汽车行驶轨迹几何特征的道路曲线,从线形上提高车辆行驶的安全性,并可以运用在无人驾驶技术中,提高无人驾驶汽车路径决策的效率。
2 三次样条函数曲线的引入
传统的道路线形设计方法并不能完全符合车辆的行驶轨迹,从而易导致行车舒适安全等问题,无人驾驶技术虽然省去了驾驶员控制这个环节,但它对道路线形的要求也将更为严格。由向心力與车速及曲线半径关系式知,当汽车在平曲线上行驶时,产生离心力的大小与曲线半径成反比,与车速的平方成正比。由曲率与半径的关系式可知,离心力与曲线的曲率有关。由于受到离心力的作用,当车速过快或者曲线曲率较大时,汽车会发生侧向滑移或横向倾覆。当车速不变时,曲率越大离心力越大。因此需在一些曲率突变的平曲线路段上改用样条函数曲线,使曲率不产生突变。
样条函数由多项式分段定义。因为样条构造简单,拟合准确,能近似拟合曲线和交互式曲线设计中复杂的形状。从物理上讲,样条曲线满足型值点的约束,同时使势能达到最小。从数学上讲,当选取为三次样条函数,这样确定的样条曲线具有连续的一阶、二阶导数。[4]因此,三次样条函数曲线具有曲率变化率这一性质。样条曲线拟合通常采用选取拟合点坐标形式,比较符合道路平面线形布设的实际操作,不仅使道路线形设计工作在没有一些必要数据的情况下能照常使用,而且曲线布设工作也变得比较容易,[5]便于设计人员实际操作。故可采取三次样条曲线来设计弯道线形,达到线形能够符合车辆重心行驶轨迹几何特征的要求。
3 样条函数曲线与一般道路曲线对比
3.1样条函数拟合曲线
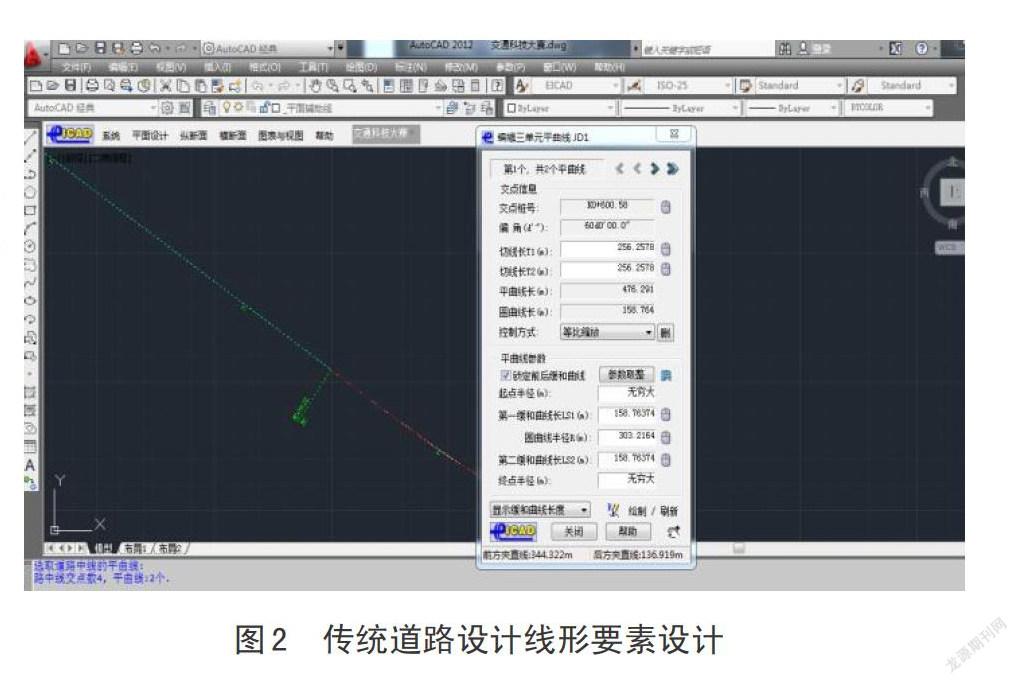
根据现有的资料,利用EICAD进行传统的道路线形设计,得到圆曲线半径为303.2164m,缓和曲线长度为 158.7637m,此时切线长为256.2578m, 圆曲线长度为158.764m,平曲线长度为476.291m.此时整个道路线形基本符合规范[5],如使缓和曲线长度与圆曲线长度之比约为1:2:1。在此基础上,进行逐桩标注,然后进行逐桩坐标的输出,此过程均可在EICAD中借助此软件进行。整理前面所得到的逐桩坐标表为电子表格的形式,然后输入origin软件中进行样条曲线的拟合,通过调整函数模板,根据得到的函数图像与现有的道路线形图坐标进行对比分析。
我们得出当拟合函数模板为样条函数时,其拟合度最高。因此我们将采用样条函数的拟合曲线与原有线形进行分析比较,得到函数误差值分析和函数参数指标分析两张表以及拟合后的曲线图。
3.2拟合曲线数值分析
origin拟合得到的公式为
其具有二阶连续导数,所以运用这个拟合函数所构建的平面线形与车辆行驶轨迹相接近,保证了行车顺畅与安全。当将这个拟合函数绘制到原先的路线图上,发现曲线走向比原来的更加具有连续性,且总体线路误差不大,20cm的范围上下浮动。
3.3对比结果
综上数据分析所得,样条函数拟合所得的曲线线形整体与原道路线形相似,但是在相差较大点处,距离上的差距还是很客观的。这些距离用于调整线路与道路环境的协调性我们认为是很富裕的。
在山区公路线形布设过程中,即使在地形、地物的严格限制条件下,样条函数拟合曲线却可以更好的结合实际地形进行道路设计,而且每个区间之内还可以增加更多的节点,这样,就能够得到精确度更高的拟合曲线,与道路环境的适应性更加完善。
具体来说,我们的方法是根据路线布设过程中的控制要求,采用样条曲线拟合以此来保证曲线上每一个点的曲率变化率是连续的,在已有的路线设计基础上,进行路线优化设计,最后绘制出来的平面线形具有布线平滑的特点,且可已知线形的函数式,这对于行车的安全具有保障作用。所以利用样条曲线来代替传统的线形组合进行设计,在匝道、山区等布设困难地方具有实际的运用价值,并且可根据已知线形函数,运用于无人驾驶技术中,使汽车做出合适的路径选择。
4道路样条函数线形与无人驾驶的结合
4.1 现阶段无人驾驶技术情况
未来无人驾驶技术的普及也需要更为优良的道路条件。现阶段无人驾驶技术主要通过一系列的传感器,摄像装置对行驶环境进行感知,从而获取信息传给控制系统,进行道路信息分析[6]。而当无人驾驶汽车系统有了道路各路段线形的参数后,将能做出更好的调整,选择最优路线进行行驶。
目前具有代表性的无人驾驶路径轨迹规划算法有:A*算法,DIJKATRA算法,RRT算法,智能群落算法等,但這些算法在无人驾驶方向的运用仍然存在很多的问题。例如,A*算法需要采用方格式环境操作,很难满足路径曲率平滑变化。智能群落算法的在线计算时间都偏长,求解速度较慢,难以满足道路车辆运行的实际要求。[7-8]
4.2 设计方法
我们设想在道路设计阶段就对道路线形进行优化设计,设计一条可以方便无人驾驶汽车行驶的专用道,这条线形具有满足汽车行驶轨迹的特征。在道路线形设计阶段中,在一些曲率变化率突变的路段就运用样条函数曲线进行拟合设计,即选取大量拟合点,使三次样条曲线经过这些点,从而获得曲率变化率连续的道路线形。
轨迹的生成如下表达:
首先由曲率公式
式中:K——曲率
再根据汽车转向运动学关系知
式中:——转向角
——汽车轴距
从而可得转向角
即已知了道路线形曲率和汽车轴距,从而实现弯道行驶转向。在道路的设计阶段我们就采用了三次样条曲线设计进行线形设计,因此各路段曲率K值等数据即可已知,从而道路线形参数可录入无人驾驶汽车大脑系统,汽车可以快速进行路径决策,调整转向角。
4.3 前后对比
该方法与其他方法的区别在于:其他方法大多都是根据无人驾驶汽车行驶在弯道上时不断地识取弯道上车道线等特征,然后系统拟合线形(其中有三次样条、五次方程式等方法),再得到中心线的线形,从而得出线形方程式,由此无人驾驶汽车进行转向盘的调整,实现转弯。而我们的方法在于:一开始进行道路设计时所有弯道的线形就已知,即为三次样条曲线,各车道中心线的函数式也就已知,把各弯道路段的线形特征录入无人驾驶汽车系统。
4.4 应用
在设计道路时,由于采用了三次样条曲线对道路线形进行了拟合,从而得到了线形的函数式,然后将道路的线形设计图与无人驾驶开发商共享,在无人驾驶的代码程序中加入道路线形参数,使得无人驾驶汽车在未驶入道路之前就已经获得了道路的线形要素,从而当车辆行驶在任何弯道上时就不用识别弯道的线形特征,只需根据已知的线形方程式进行转向调整,且线形又符合车辆的行驶轨迹特征。在车辆驶入道路的同时,无人驾驶汽车通过原有技术利用传感器获取周边交通环境,上传云端进行数据处理。[9]在此阶段再次利用三次样条函数曲线进行路径决策,经过实验数据比对分析,发现利用样条函数曲线迅速,安全的进行路径决策反馈,故这样可使无人驾驶汽车在弯道上快速、平稳、安全的行驶。
5 结语
本文主要通过将样条函数曲线拟合道路线形和现有的道路线形设计方法相结合,使得道路线形设计在满足现有的规范要求的条件下更加符合车辆的行驶轨迹,而且更具技术性和经济性。将我们的研究思路运用到现有的道路线形设计中,可使线形在布线时更加方便、自由、灵活,同时对于路线方案在实际工程上的布设也更具适用性。
复杂的道路环境将对计算机算法将提出巨大的挑战,因此我们若是能够在道路设计阶段就进行优化,选取符合汽车行驶轨迹的道路线形,运用样条函数进行拟合设计,得到相应路段函数曲线函数,然后将其数据储存在云端,将道路线形信息并入车联网系统,在车辆未驶入道路之前就已经获得道路的信息,然后做出相应的调整,从而建立起适宜无人驾驶汽车行驶的路线条件。
参考文献:
[1]张珂.道路线形优化设计分析[J]. 中州建设, 2007,(10): 68.
[2]崔金垚.山区四级公路连续弯道车辆行驶轨迹偏移量特性研究[D].福建农业大学, 2016:7-12.
[3]何平.样条函数在曲线拟合中的应用[J].工业仪表与自动化装置,1993,(3):12-16.
[4]中华人民共和国行业标准.JTG B01-2014 公路工程技术标准[S].北京:人民交通出版社股份有限公司,2016.
[5]徐进.轨迹-速度协调控制的山区公路平面线形设计方法[J].中国公路学报,2013,26(4):0043-14.
[6]严新平,吴超中.智能运输系统——原理、方法及应用[M].2版.武汉:武汉理工大学出版社,2014.
[7]张文辉,林子安,刘彤,等.基于改进人工鱼群算法的机器人路径规划[J].计算机仿真,2016,(12):374-379,448
[8]冯来春,梁华为,杜明博,等.基于A*引导域的RRT智能汽车路径规划算法[J].计算机系统应用,2017,26(8):127-133
[9]董长青,丁田妹,黄晓廷,赵鹏超.无人驾驶的人机交互方式研究综述(J),时代汽车,2017(14):11-12.
