基于Hu矩和递进Hough变换的SOT元件识别定位算法
2019-09-05武洪恩倪良月李红飞
武洪恩,倪良月,王 凯,李红飞
(山东科技大学 机械电子工程学院,山东 青岛 266590)
0 引言
模板匹配法的灵活性较差,且建模需要花费大量的时间和空间,使得算法的运算量加大,不符合贴片机高效率的要求。引脚质心法通过搜索获得的元件引脚的中点坐标,利用最小二乘法对获得的中心进行直线的拟合实现元件的定位,该方法简单且高效,但太过于依赖元件管脚的完整性,当矩形元件的引脚出现轻微不对称或变形等问题时,就会使该方法的准确性降低。针对当前的研究现状,本文提出了一种基于Hu矩和递进Hough变换的SOT元件识别算法。该算法选用基于主体轮廓的面积和Hu矩的特征实现SOT元件的识别检测,再通过递进Hough变换对贴片元件进行定位检测,最后将获得的参数传输到贴片机的控制系统,完成对SOT芯片的自动贴装。
1 基本工作原理
SOT元件的识别定位算法流程图见图1。通过工业相机对采集的图像进行预处理,提取元件的主体轮廓特征,利用面积法对元件进行初步识别,再通过Hu矩对元件进行精确识别,对于不合格的贴片元件,将其剔除;对于合格的贴片元件,对其进行定位信息的提取。
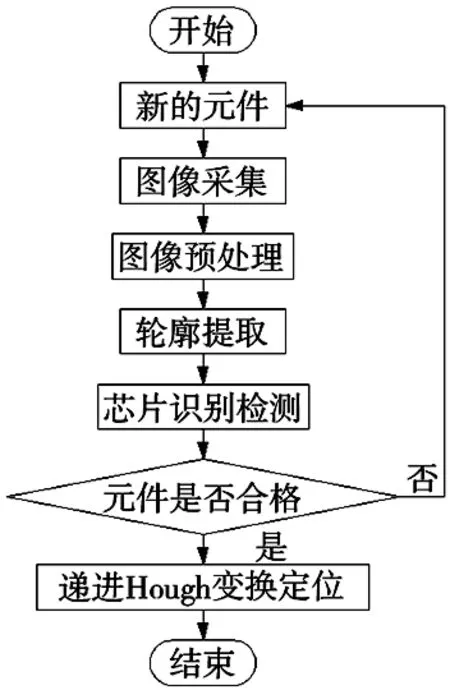
图1 视觉算法流程
2 SOT元件识别和定位算法
2.1 图像预处理
在原始灰度图像采集的过程中会受到不同强度光源和各种噪声的影响,为了减少图像中的干扰信息,方便提取有用的信息,采用中值滤波方法对图像进行平滑处理。平滑处理后,需要对图像进行图像分割,常用的图像分割方法是阀值分割法(图像二值化)。阀值分割是根据目标区域和背景区域占据不同的灰度级进行图像的分割,设定某一阀值T将图像分为两个部分:小于阀值T的用“0”表示,大于阀值T的用“1”表示,表达式为:

(1)
式中,f(x,y)为图像相应坐标点的灰度值;g(x,y)为阀值分割后图像相应坐标点的像素值。利用图像处理工具统计得到贴片元件的灰度直方图,如图2所示。
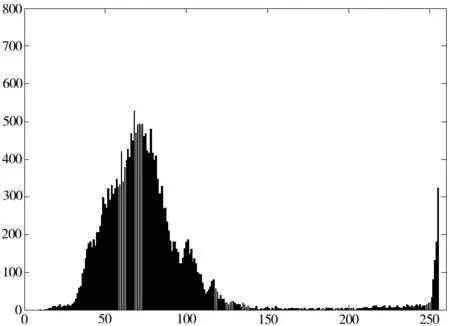
图2 灰度直方图
图2表明,目标区域和背景区域的划分明显,利用最大间方差法(Ostu)[5-6]完成图像的阀值分割。对一幅图像I(x,y),目标区域的像素点数占整幅图像的比例记为ω0,目标区域的平均灰度记为μ0,背景区域的像素点占整幅图像的比例记为ω1,背景区域的平均灰度记为μ1,类间方差记为g,则最大间类方差的表达式为:
g=ω0ω1(μ0-μ1)2
(2)
当方差g最大时,认为此时的目标区域和背景区域的差异最大,即T为最佳阀值。最后利用最佳阀值T对图像进行分割处理,得到SOT元件的二值化图像。
股骨颈骨折手术治疗后,深静脉血栓形成率比较高,是一种常见的股骨颈骨折术后并发症。深静脉血栓形成对股骨颈骨折手术治疗效果会产生十分重要的影响,容易降低手术治疗的有效性,从而降低患者的生活质量[3]。通过有效的护理管理措施,对深静脉血栓的形成可以起到一定的预防性作用,降低其发生率[4]。
对贴片元件进行阀值分割得到的二值化图像还存在一些引脚的离散点,可能对图像轮廓特征提取时造成影响,为了对图像的轮廓进行精确地提取,采用形态学开运算对二值化图像进行处理。开运算是先腐蚀后膨胀的过程,其定义为:
A∘B=(AΘB)⊕B
(3)
式中,A为目标图像元素,B为结构元素。
2.2 图像轮廓的提取与跟踪
为了提取目标图像的轮廓信息,先通过去除内部像素点的方法,对元件主体轮廓二值化图像进行轮廓提取;再采用八邻域轮廓跟踪算法[7]进行目标元件的轮廓信息提取。八邻域示意图见图3。记从(x+1,y)开始逆时针方向的像素点分别为(x,y)的0邻域、1邻域...7邻域。利用八邻域算法进行轮廓跟踪时,首先从图像的左上角出发,寻找第一个非0的点,作为轮廓跟踪的起点P0,记录其坐标值;再以P0为起点,沿0邻域到7邻域的方向依次查找下一个轮廓跟踪点,记录其坐标值;最后按照上述规律依次查找其它轮廓跟踪点,直到边缘点Pn的下一个跟踪点为P0时,轮廓跟踪结束。
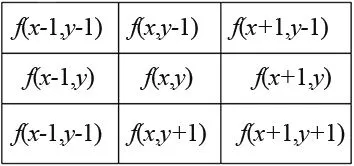
图3 八邻域示意图
2.3 SOT元件的识别
本文先利用轮廓的面积对元件进行初始筛选,设元件的轮廓面积在S1~S2之间,如果元件的轮廓面积在此范围内,则初步认定为合格芯片;再利用Hu矩对SOT贴片元件进行精确识别。
设大小为M×N的二维图像用f(x,y)表示,图像的(p+q)阶几何矩mpq定义为:
(4)
图像的(p+q)阶中心矩μpq定义为:
(5)
(6)
Hu[8]利用二阶和三阶归一化中心矩推出了7个不变矩组,本文只应用前3个M1~M3:
M1=η20+η02
(7)
(8)
M3=(η30-3η12)2+(3η21-η03)2
(9)
可以从上述Hu矩的计算中提取目标图像的中心坐标:

(10)
2.4 改进Hough变换
2.4.1 传统Hough变换
传统Hough变换检测直线的思想,是利用点线对偶将图像空间中直线的检测问题,转化为参数空间的点的检测问题,以此为依据进行直线的提取[9]。常用表达式为:
ρ=xcosθ+ysinθ
(11)
式中,ρ为极径,θ在[0,π)内取值,x为像素点的行坐标,y像素点的列坐标。
为了进一步对传统Hough变换的精度进行分析,图像空间中,记M×N图像像素的灰度值为I(xi,yi);参数空间中,令ρ的采样个数为Q,θ在[0,π)区间均匀的取K个离散值,记图像所有像素点灰度值累加器单元为H(ρq,θk),对θ进行步距为Δ的直线检测。则直线检测中的Hough变换可表示为:

(12)
2.4.2 递进Hough变换
为了提高检测速度,满足贴装要求,改进了Hough变换,采用步距由大到小的递进方式进行直线检测[11]。递进Hough变换算法步骤为:
(2)搜索目标图像中所有的像素点,将找到的像素点根据公式(6)映射到参数空间;
(3)对θ在[0,π)区间内进行步距为Δ1的直线粗检测,并在参数空间内将累加器对应的位置加1;
(4)进行所有点的扫描,比对每个累加器的值,选取参数空间H(ρq,θk)值最大的累加器单元为最优直线,取其与x轴的夹角θx;


3 实验结果与分析
本文采集100张元件的图像作为实验样本,利用计算机视觉库(OpenCV)[12-13],计算元件的轮廓面积,然后将其进行数学统计,得到的实验样本的轮廓面积分布图,见图4。由图4可知,元件的轮廓面积在1803~1849mm2范围内,轮廓面积在此区间内的元件,初步认定为合格元件,还需进行Hu矩的精确识别检测。
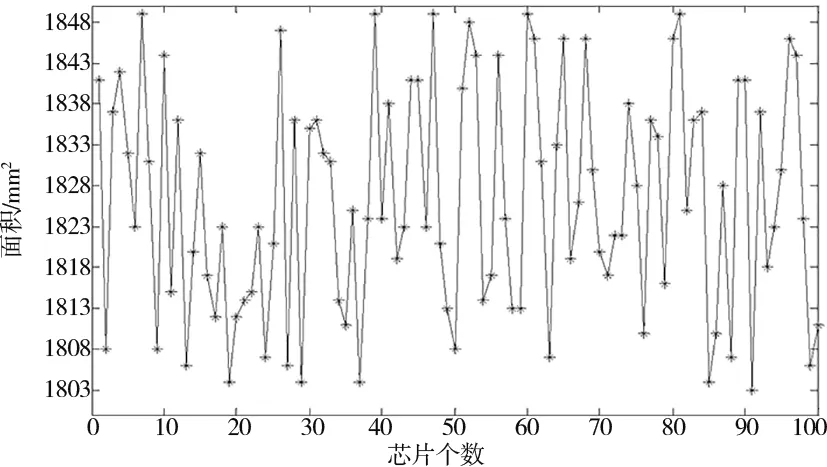
图4 轮廓面积分布图
针对Hu矩进行实验,对上述采集的100张图像,分别进行Hu矩的计算,将得到M1,M2,M3矩分别进行数学统计,见图5。由图5可知,M1的范围为(0.134,0.16),M2的范围为(0.00345,0.006),M3的范围为(2.507×10-6,4.859×10-6)。将Hu矩不在此范围内的元件认定为缺陷元件,将其剔除。
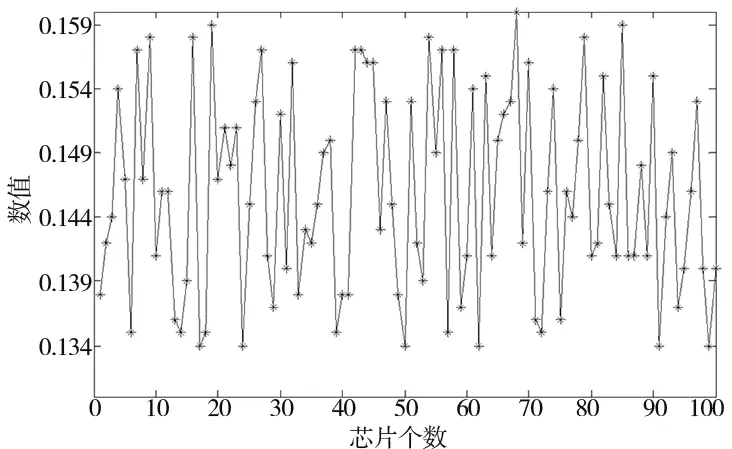
(a) M1矩数值分布图
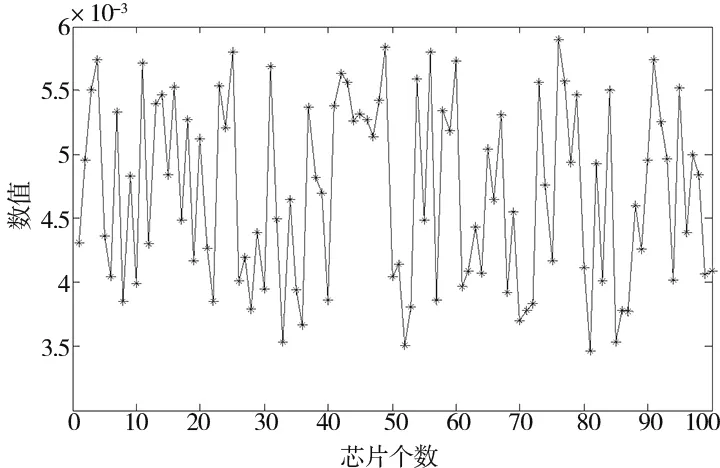
(b) M2矩数值分布图
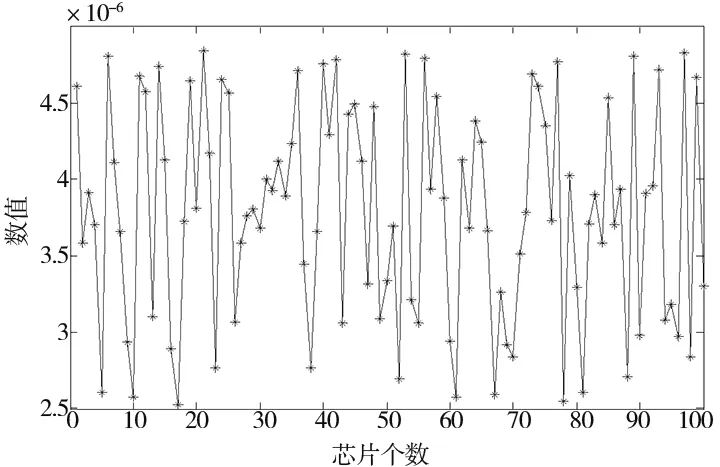
(c) M3矩数值分布图 图5 Hu矩数值分布
SOT元件的类型比较多,本文选取常用的SOT223和SOT233类型的元件作为实验对象,分别采集200张图像作为实验样本。对上述采集到的元件图像,分别采用文中算法和传统模版匹配算法进行识别定位,具体参数见表 1。由表1可知,本文算法的元件识别率较通常的模板匹配法有所提升,且本文所述算法的用时较短,提高了识别效率,也间接提高了贴片机的贴装质量。

表1 算法识别率的比较结果
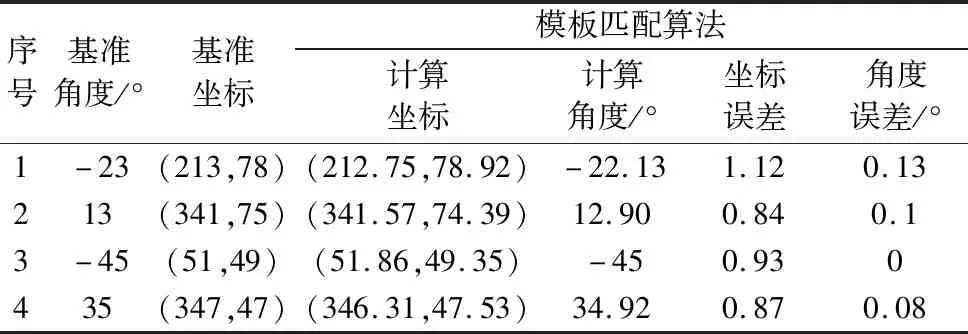
SOT元件定位时,在不同贴片元件中识别出合格的SOT233元件,实验图像见图6。在识别的基础上,通过文中所述算法和模版匹配算法,提取SOT233元件的中心,中心用圆点标记,效果见图7,得到的特征参数见表2。
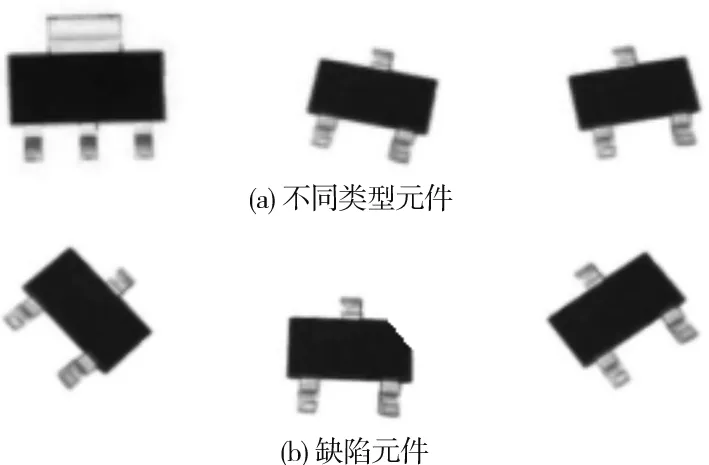
图6 实验图像
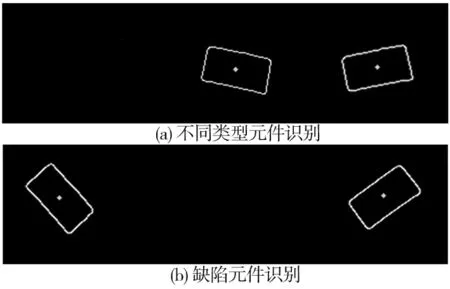
图7 识别效果图
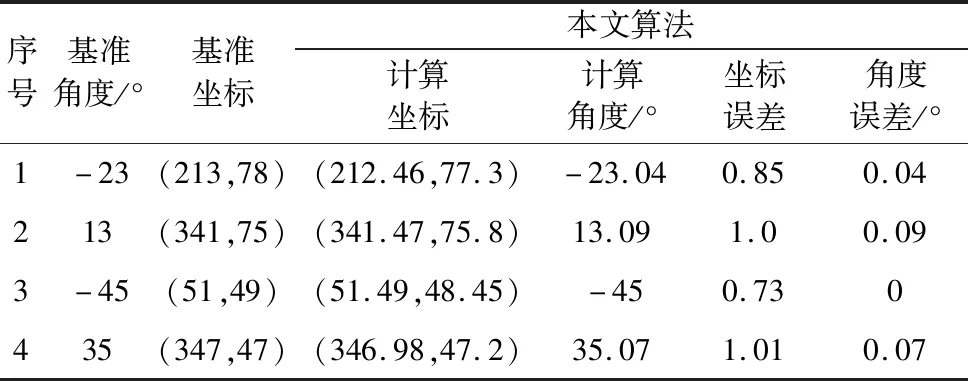
序号基准角度/°基准坐标本文算法计算坐标计算角度/°坐标误差角度误差/°1-23(213,78)(212.46,77.3)-23.040.850.04213(341,75)(341.47,75.8)13.091.00.093-45(51,49)(51.49,48.45)-450.730435(347,47)(346.98,47.2)35.071.010.07
续表
从表2可以看到,本文算法的元件中心偏移误差最大为1.01,且偏移角度精度达到0.09°,优于通常的模板匹配算法。因为本文利用递进Hough变换进行芯片定位时,对θ采用步距由大到小的递进方式进行直线检测,大大提高了检测精度。在本文的算法下,芯片中心偏移误差在1.5个像素内,偏移角度在0.1°内,能较好满足贴片机高质量高精度的要求。
4 结论
本文针对提高SOT元件的贴装质量和贴装精度的问题,提出了一种基于Hu矩和递进Hough变换的SOT元件识别算法。本算法先利用元件主体轮廓的面积对贴片元件进行初始识别,再利用Hu矩对元件进行精确识别,不仅提高了贴片元件的正确识别率,而且间接提高了贴片机的贴装质量。并通过递进Hough变换对主体轮廓进行定位检测,定位精度高,处理速度快,能较好满足实际生产中的贴装要求。