新型的气压式仿人机器人腰部机构设计及其运动仿真
2018-08-21王颖娴
王颖娴
(西安职业技术学院,西安 710032)
0 引言
随着信息技术的发展,仿人机器人走进人们的视野,机器人市场正在不断扩大,未来生活中人们必将会越来越依赖机器人去完成各种任务。机器人的拟人化行为不仅可以给人们带来身体及心理上的舒适感,而且可以提高人机的合作效率。仿人机器人是一个多自由度、非线性、具有复杂运动学、动力学特征的系统,仿人机器人主要是根据人体的各部分的基本结构与运动机理进行研究,腰部机构作为仿人机器人的核心枢纽起着不可或缺的重要作用,其传动过程、机构设计、刚度控制等均对最终的运动形态有所影响,因此腰部机构的设计直接影响着整个系统的柔性以及稳定性,决定着仿人机器人的最终质量[1]。 目前,机器人的传动方式主要是以电机作为动力源,本文所介绍的仿人机器人具有差动腰部机构,除了受自身动力学影响之外,还会受到手臂和车体运动以及外力矩等因素的影响,腰部结构是双臂与车体的链接枢纽,所以腰部各关节的位姿跟踪精度直接会影响双臂末端的作业精度,它所受到的来自车体和双臂的动力学影响也很大,不能忽略。
1 总体设计概述
仿人机器人是集机构、驱动、传感等核心部件以及仿生、交互、智能等技术于一体的综合平台,是我国“十一五”期间先进制造技术领域设立的重点项目。仿人机器人的研究会促进先进机器人部件的更新,带动先进机器人智能技术的发展。随着对仿人机器人运动、感知、作业能力要求的不断提高,对高精度的传动机构、高性能的电机驱动、高性能的感知系统以及运动能力提出了更高的要求。机器人腰部在整个系统中占重要作用,是整个机器人的中介枢纽,所以对腰部结构的设计始终受到人们关注。
1.1 腰部机构的作用
(1)腰部是连接仿人机器人上肢与下肢的枢纽。
(2)腰部各关节的精度直接影响仿人机器人的双臂作业精准度。
(3)腰部的运动状态直接影响仿人机器人腿部的行走状态。
(4)腰部负责自由调整仿人机器人的重心。
1.2 腰部机构的功能需求
(1)要具备与真实人体腰部相类似的灵活空间以及自由度。
(2)要确保关节的承重能力以及精准度。
(3)要保证驱动电机的位置不在关节以及运动部件上。
1.3 设计原则
(1)仿生性:包括高度、动作、自由度等在内的结构和功能都应该尽量仿人。
(2)稳定性:仿人机器人涉及关节较多,控制线路复杂,而且瞬间的转矩会比较大,因此,对控制系统和驱动元件的要求较高。
(3)高刚度:仿人机器人需要具备良好的刚性,避免机械变形、插件松动等现象。
(4)低成本:在满足功能需求的基础上,尽可能选择常见材料以及元器件,降低系统成本。
1.4 设计思路
(1)将电机与传动链都固接在下板,降低腰部高度从而降低了重心,增强系统的稳定性。
(2)电机布置避开关节以及运动件,降低负载的同时提高了运动的精准度。
(3)采用两个差动轮系封闭式传动,降低电机功率,减少电源消耗。
(4)利用柔索,提升了系统的柔性,增强仿人机器人工作时的安全性。
(5)利用连杆,扩大腰部机构的运动范围,提升腰部机构的承载能力[2]。
2 新型气压式仿人机器人腰部机构详细设计
2.1 整体结构
根据腰部机构的构成要素以及功能要求,整个控制系统可以划分为PC机、控制部分、驱动部分、动力电机、传感器以及结构平台。控制系统结构,如图1所示。
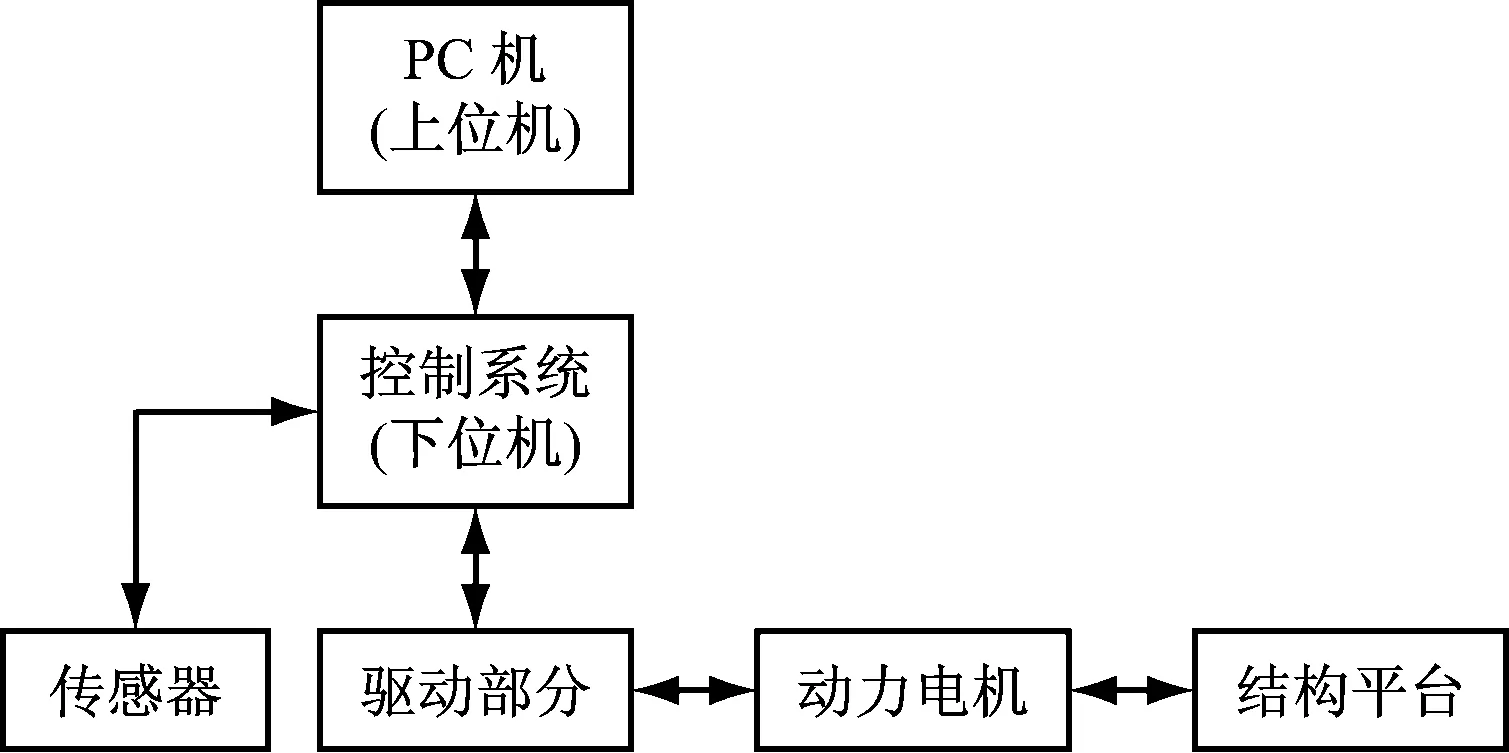
图1 控制系统框图
腰部结构控制系统主要采用上位机、下位机分层的控制策略以及指令化的控制方式。借助PC机强大的逻辑判断运算能力与信息处理能力,上位机系统解析出用户输入的指令,将运动参数发送给下位机完成相应的运控控制。同时下位机也会将运动状态和传感器信号反馈给上位机,方便用户实时监测。仿人机器人是根据人体各个部分的运动机理开发的具备动力学特性的智能化系统,腰部机构既是核心的枢纽又负责调整重心,是仿人机器人不可或缺的重要组成部分,其整体结构包括气压传动系统、控制系统、传感系统、机械系统以及电源系统。具体部件由驱动电机、差动轮系、连杆、柔索以及变刚度结构单元等组成[3]。
2.2 运动指标
(1)俯仰运动:前倾角度范围为0到45°,后仰角度0到5°。
(2)侧倾运动:左右侧倾角度范围为正负15°。
(3)扭转运动:角度范围为正负90°。
(4)运动速度:0.2弧度/s 。
(5)加速度:0.1弧度/s。
2.3 腰部机构详细设计
(1)传动过程
仿人机器人的腰部传动过程由差动轮系实现,两个差动轮系采取封闭式传动,依然保持系统存在两个自由度,如图2所示。
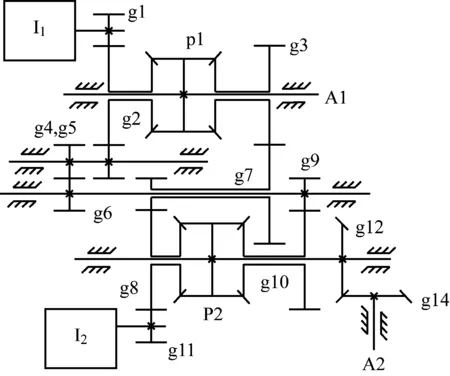
图2 差动轮系封闭式传动
其中,I1、I2代表驱动电机,A1、A2代表输出轴,P1、P2代表加法器。运行的时候由I1、I2驱动P1的输出轴A1转动,与此同时也驱动P2的输出轴转动,然后通过圆锥齿轮来使输出轴A2进行转动,从而完成传动过程。中间轮g4、g5可以改变旋转的方向,输出轴A1、A2则可以作为机器人侧倾以及俯仰运动的驱动轴,使仿人机器人既可以实现单独的侧倾或者俯仰,也可以实现两者结合在一起的复合型运动。
(2)机构设计
将仿人机器人的躯干等零部件安装在上板上,差动轮系封闭式传动系统安装在下板上,如图3所示。

图3 仿人机器人腰部机构图
其中1、11、2、21代表连杆,3、31代表柔索,A1、A2代表输出轴,具体工作原理如下:
a) 连杆1、11位于中间版的中心轴线。上端与中间板连接,连杆1的下端与A1连接,连杆11与下板通过铰链连接在一起,连杆1由输出轴A1进行驱动[4]。
b) 连杆2、21一端和中间板连接,另一端和上板连接。将连杆2、21的两端分别固接在中间板与上板的中心轴线上,上板就会随着中间板同步运动,进而实现腰部机构的侧倾运动。
c) 柔索3、31一端与上板中心轴线固接,另一端与输出轴A2固接,并且采用反向连接的方式使3、31的运动方向是相反的。由柔索3、31来驱动上板就可以实现腰部机构的俯仰运动。
(3)刚度控制
本设计中利用柔索和非线性变刚度结构单元来驱动仿人机器人的俯仰运动,刚度调节的范围在理论上可以达到零到无穷大。非线性变刚度结构单元的结构组成,如图3所示。
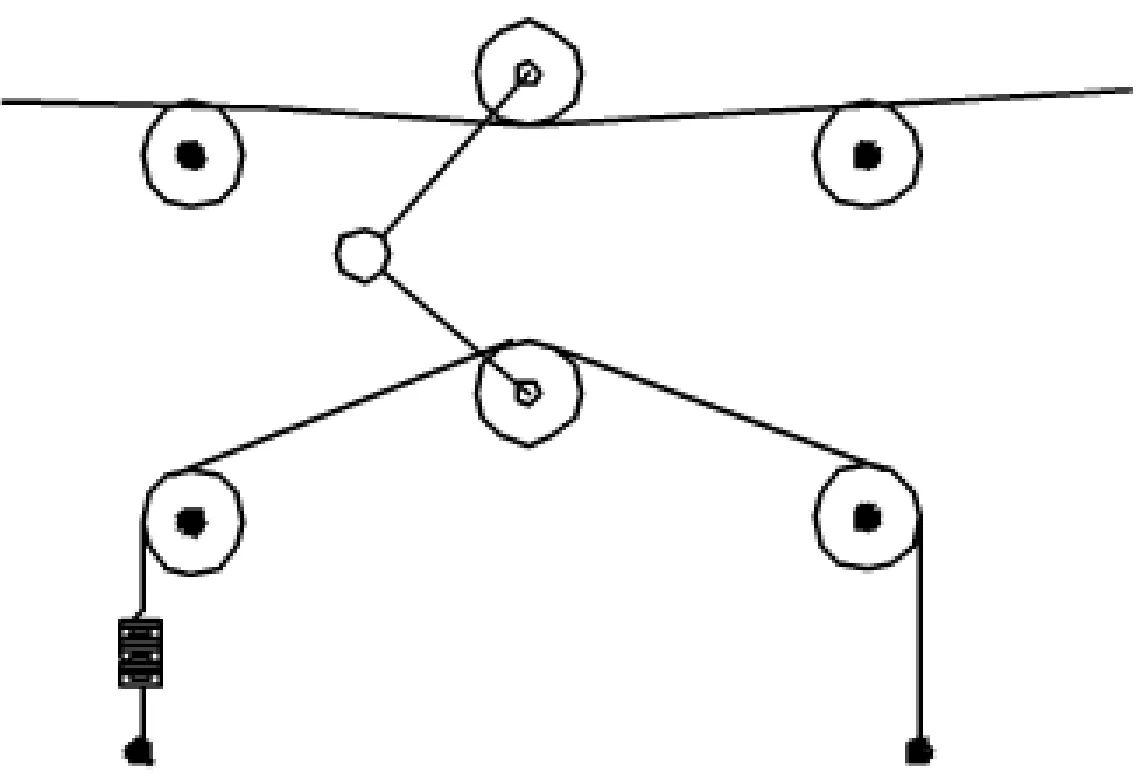
图3 非线性变刚度结构单元
其中包括2个动滑轮、4个定滑轮、线性弹簧、柔索以及回转臂。回转臂改变转角进而调整动滑轮间的距离,和线性弹簧组合起来觉得柔索的刚度变化情况,使仿人机器人的柔性更好,进而提高系统的安全性[5]。
3 新型气压式仿人机器人腰部机构运动仿真
3.1 动力学模型
我们利用高效牛顿-欧拉算法来进行动力学建模,将全部杆件的速度、加速度、惯性矩阵、力和力矩等以自身杆件坐标系做参照,使计算驱动力矩的时间与仿人机器人的关节数成正比关系。力矩表达形式,如式(1)。
τ(t)=D(q(t))q(t)+h(q(t),q(t))+c(q(t))
(1)
式1)中,τ(t)代表各个关节力矩的等效列向量,q(t)代表各个关节加速度或者角加速度列向量,q(t)代表各个关节速度或者角速度列向量,q(t)代表各个关节位移或者角位移列向量[6]。
如果忽略关节之间的哥氏力,力矩取惯性力、离心力与重力的叠加,则公式(1)可简化为式(2)。
τ(t)=D(q(t))q(t)+h(q(t))q(t)2+c(q(t))
(2)
如果再不考虑各个关节之间的耦合作用,最终简化后的仿人机器人的腰部机构动力学模型为式(3)。

(3)
3.2 运动仿真
(1)工作流程
随着科学技术的发展,仿真技术已经成为改进设计、提高性能的有效手段,是虚拟样机技术中不可或缺的一部分。指的是利用物理信息以及几何信息获得机械系统的虚拟样机,并在虚拟环境中模拟样机的运动,以便于对运动情况和受力情况进行分析。降低开发成本的同时还大幅提升了设计的质量和效率,其具体流程,如图4所示。
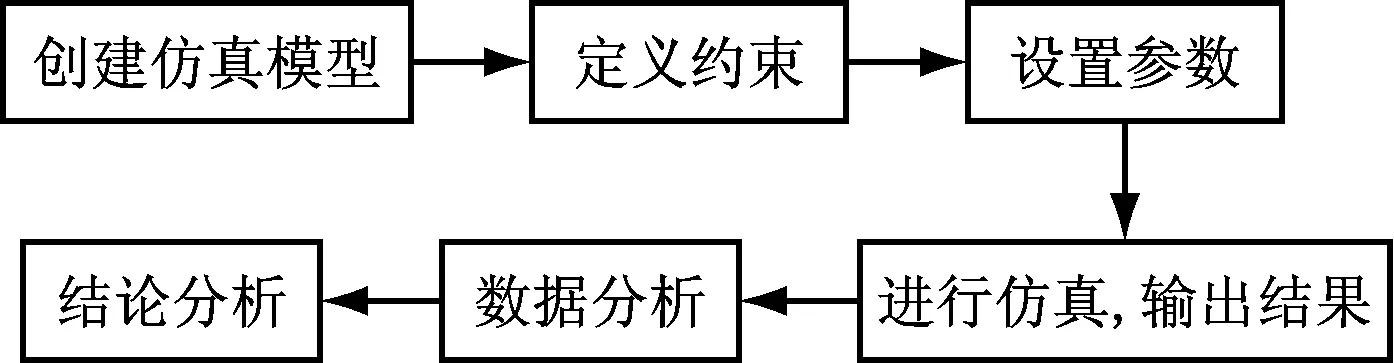
图4 运动仿真流程
(2)运动仿真
仿人机器人的运动仿真是从机械设计的角度考虑,为结构设计所服务,通过运动仿真分析来获得相关的关节速度、加速度等数据,为后续工作提供实验数据的分析与参考[7]。
本设计中通过Mechpro2005接口软件定义Bodies以及Joints参数之后,将三维模型导入ADAMS软件,运用step函数对仿人机器人腰部机构的俯仰运动以及侧转运动进行动力学仿真,得出相关关节的位置、角速度以及角加速度结果,如图5、图6所示。
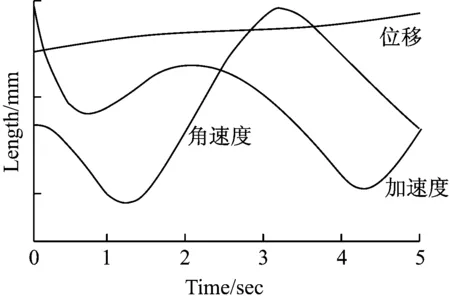
图5 腰部俯仰运动仿真
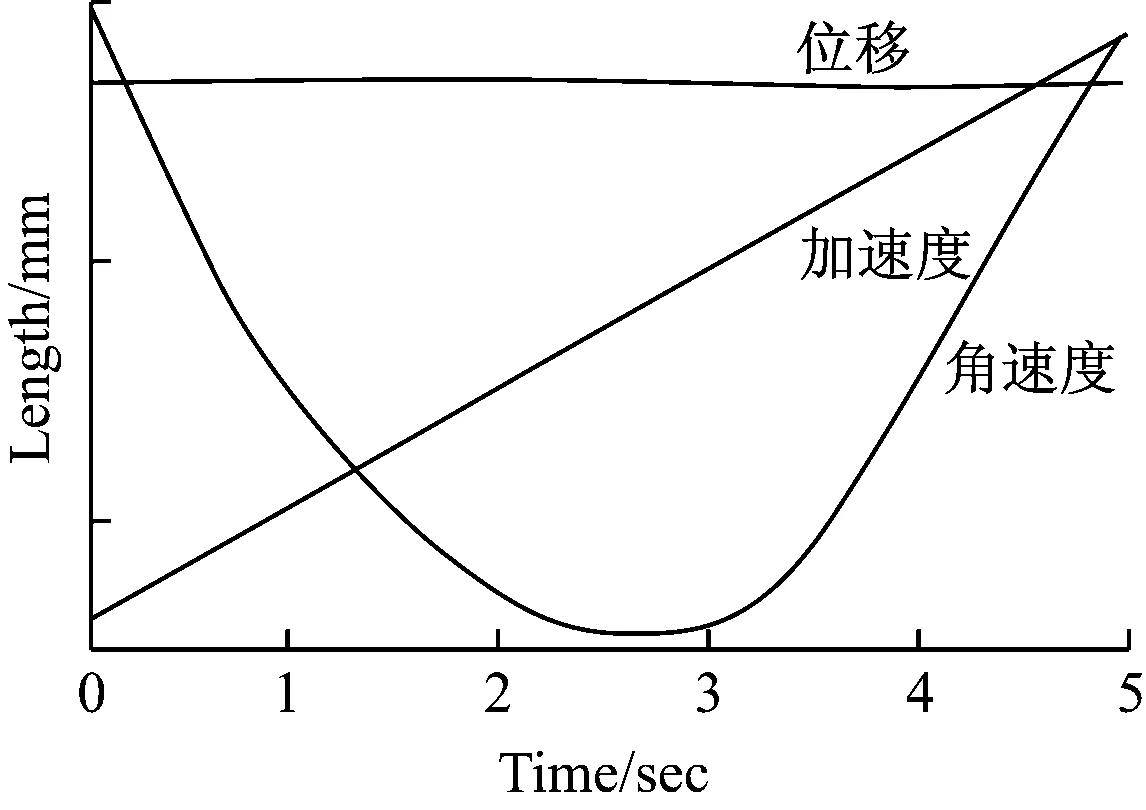
图6 腰部侧倾运动仿真
4 总结
仿人机器人的腰部机构是连接上肢与下肢的枢纽,控制着整个身体的重心,并且运动形态直接影响双臂以及双腿的运动形态,在运行过程中需要完成的运动包括俯仰、侧倾以及回转等,其传动过程、机构设计以及刚度控制都决定了其灵活性与柔性,本文给出了详细设计方案并建立了动力学模型,最终得出的运动仿真结果表明本设计方案可行、可靠。
