基于FCM聚类及位置区切换的室内地磁定位研究
2018-07-27宋宇喻文举程超
宋宇 喻文举 程超

摘 要: 针对目前室内地磁定位技术中存在的地磁指纹库太大及地磁指纹不惟一所造成的运算量大、定位误差大的问题,提出一种基于模糊C?均值聚类与位置区切换相结合的室內地磁定位方法。首先对待定位点的位置区进行判别,然后对该点地磁矢量所属的聚类进行判别,最后在其所属的位置区及聚类对应的匹配范围内进行匹配定位。经过以上两步判别,可以缩小地磁指纹的匹配范围,减小匹配运算量,同时降低了地磁矢量接近但地理位置上相距较远时加大定位误差的风险。经实验及仿真验证,改进的方法相比WKNN(KNN)算法减少了约41%的运算耗时(1 000个地磁指纹的情况下),定位精度提高了约76%。
关键词: 室内地磁定位; 地磁定位技术; 地磁指纹库; 模糊C?均值聚类; 位置区切换; 匹配定位
中图分类号: TN953+.7?34; TP391 文献标识码: A 文章编号: 1004?373X(2018)14?0096?05
Research on indoor geomagnetic positioning based on FCM
clustering and location area switching
SONG Yu, YU Wenju, CHENG Chao
(School of Computer Science and Engineering, Changchun University of Technology, Jilin 130012, China)
Abstract: In allusion to the problems of big amount of computations and big positioning errors caused by much hugeness of the geomagnetic fingerprint database and non?uniqueness of the geomagnetic fingerprints existing in the current indoor geomagnetic positioning technology, an indoor geomagnetic positioning method based on the combination of fuzzy C?means clustering and location area switching is proposed. The location area of the to?be positioned point is discriminated, the cluster that the geomagnetic vector of the point belongs to is discriminated, and the matching positioning is performed in the location area of the point and within the matching range corresponding to the cluster. The above two discriminations can reduce the matching range of geomagnetic fingerprints, the amount of matching computations, and the risk of increasing positioning errors when the geomagnetic vectors are approximate but geographically far away. The results of the experiment and simulation verification show that in comparison with the WKNN(KNN) algorithm, the improved method can reduce the computation time consumption by about 41% in the case of 1000 geomagnetic fingerprints and improve the positioning accuracy by about 76%.
Keywords: indoor geomagnetic positioning; geomagnetic positioning technology; geomagnetic fingerprint database; fuzzy C?means clustering; location area switching; matching positioning
随着科学技术的进步,基于位置服务(LBS)的增值业务对室内定位的需求越来越多。但是目前的全球卫星导航系统比如GPS,BDS等,由于卫星信号受到建筑物或其他障碍物的阻挡导致在一些密闭的室内无法定位。因此自2000年以来,高精度、低成本的室内定位技术一直是相关学者研究的热点[1]。目前室内定位技术有RFID,UWB,蓝牙,ZigBee等[2?5],但这些定位技术需要铺设专门的基础设施或者需要高成本的定位终端。
地磁场是地球的固有磁场。对于室内环境,由于地磁场受到钢筋混凝土建筑、铺设的电缆管道、大型金属或电磁制品等的影响而发生扭曲[1],造成室内不同位置的地磁场矢量差异化加大,因此可将其作为一种位置指纹用于室内定位。
相比其他室内定位技术,基于地磁的室内定位技术不需要专设任何基础设施,只依靠室内被建筑物扭曲的地磁场即可。同时,地磁定位可以用已经普及的智能手机作为定位终端。
室内地磁定位技术目前还不成熟,有很多问题有待解决。其中,地磁指纹库太大造成的运算量大以及地磁指纹不唯一[6?7]造成的定位误差大这两个问题比较典型。文献[8]运用惯导辅助地磁的定位方法缩小地磁匹配范围来解决以上问题,取得了较高的精度,但其惯导初始点的更新依赖前一点定位的准确度,而本文从新的角度提出的对地磁指纹分类与位置区切换相结合的方法中,位置区状态的更新只依赖前一个定位点的位置区状态是否正确,并不直接依赖前一点定位的准确度,因而鲁棒性有所提高。
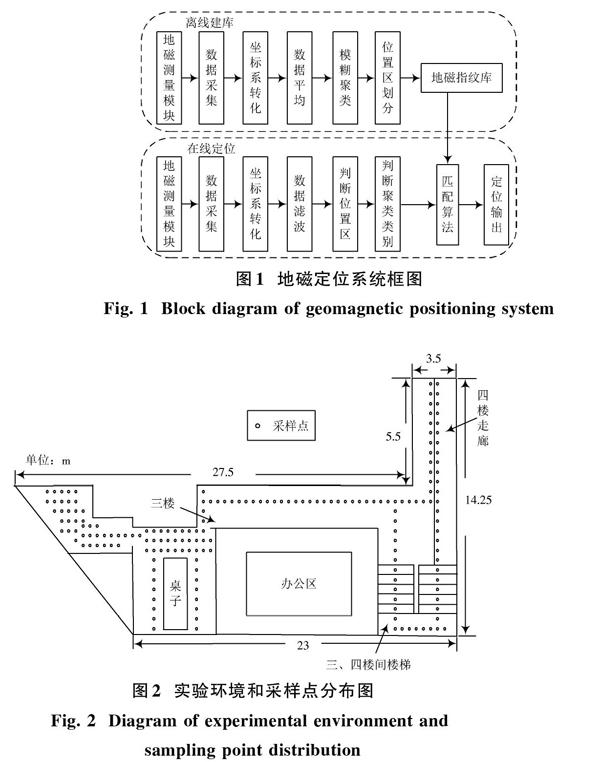
1 地磁定位系统组成
地磁定位流程分为离线地磁指纹库的建立和在线定位两个阶段。本文定位方法的系统框图如图1所示。
2 室内地磁指纹库的建立
本文选择地磁场在参考坐标系上的三个轴分量组成匹配矢量。下面结合具体的实验环境来说明地磁指纹库的建立过程。
2.1 实验环境设定
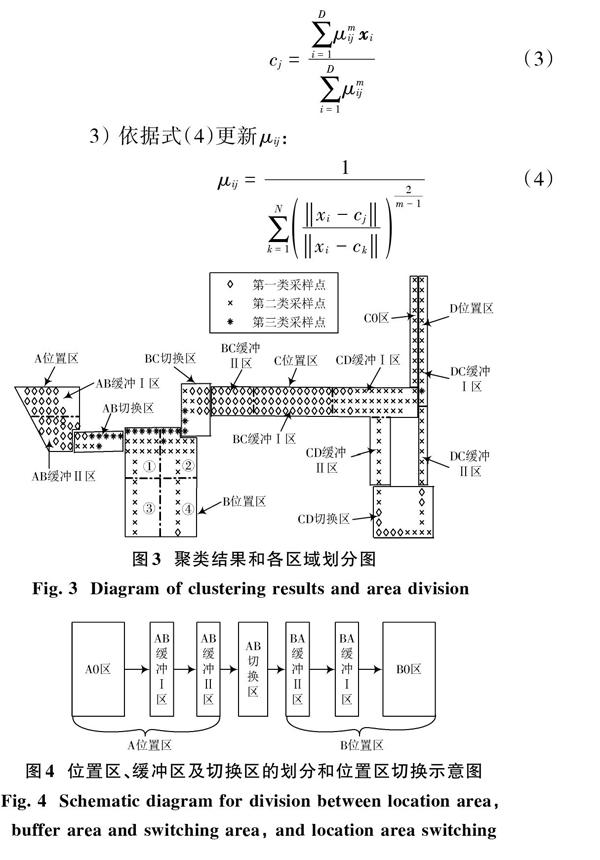
实验环境选在本校某楼,包括三楼两个实验室房间、走廊、楼梯及四楼一条走廊。采样区域面积大约为160 m2。本文按0.5 m×0.5 m的网格(1个点因阻挡除外)共设定238个参考点。实验环境和参考点分布如图2所示。
本文使用的地磁采集设备是小米5手机,其配备了AKM公司生产的型号为AK09915的三轴磁力计,该磁力计测量精度为0.149 536 13 μT。同时小米5手机还配备了LSM6DS3加速度计、LSM6DS3陀螺仪及QTI方向传感器等,为采集的地磁矢量进行坐标系的转化提供了条件。
2.2 地磁指纹采集方法
具体的地磁指纹采集步骤如下:
1) 根据室内结构和所需定位精度进行参考点的确定,并给定所有参考点的坐标。
2) 在每个参考点正上方固定高度用采集软件对地磁矢量、手机姿态等参数进行多方位重复采集。
3) 通过手机姿态数据将采集的地磁矢量从载体坐标系转化到导航坐标系[9]以便所有地磁矢量能够直接进行匹配。转化后将每个参考点的地磁矢量分别进行平均,并与位置坐标结合后存入数据库。通过坐标系转换后的x轴数值都接近0,可忽略不计。
4) 将采集好的所有地磁矢量通过FCM算法进行聚类。
5) 参考点聚类之后,进行位置区、缓冲区、切换区的划分。
3 地磁定位算法
3.1 FCM聚类算法
模糊C?均值聚类(Fuzzy C?means,FCM)是基于目标函数的软聚类算法,每个元素属于每个类的程度都用隶属度的大小表示[10]。隶属度对地磁匹配范围的调整有参考意义。
FCM算法是基于目标函数的最小值[11],如下:
[Jm=i=1Dj=1Nμmijxi-cj2] (1)
式中:D表示需要聚类的数据个数;N表示所聚的类数;[m]是模糊划分矩阵指数,用以控制模糊重叠度,[m]>1,一般取[m]=2;[xi]是第i个参考点的地磁矢量;[cj]是第j个类的聚类中心; [μij]是[xi]属于第j类的隶属度,且满足式(2):
[j=1Nμij=1] (2)
FCM算法步骤如下[11]:
1) 随机初始化聚类的隶属度值,并给出聚类的类数N、停止阈值ε、最大迭代次数P;
2) 依据式(3)计算每个聚类的聚类中心:
[cj=i=1Dμmijxii=1Dμmij] (3)
3) 依据式(4)更新[μij]:
[μij=1k=1Nxi-cjxi-ck2m-1] (4)
4) 计算目标函数式(1)的值[Jm];
5) 重复步骤2)~步骤4),直到[Jm]的值小于给定的停止阈值ε或者大于给定的最大迭代次数P为止。
为了防止因测量误差导致待定位点分类错误,本文设定当待测点的最大隶属度低于0.55时,在最终确定的匹配范围内将隶属度较大的前两类指纹点作为匹配点。
3.2 位置区切换
对参考点地磁矢量进行聚类后发现,同一类的地磁矢量在地理位置上往往是不连续的。因此,当待定位点在同一类但位置上不连续的多个分区进行地磁匹配时,如果多个分区中都存在一些点和待定位点地磁矢量非常接近,就可能导致很大的定位误差。该问题是由地磁指纹不惟一引起的,引入位置区切换就是为了应对这一问题。
3.2.1 位置区切换原理
Michael Angermann等研究了现代的工字钢梁和钢筋混凝土建筑物对地磁场强度的影响[7,12],结果发现工字钢梁的砖墙附近磁场变化率为7.15 μT/m,钢筋混凝土建筑的走廊、大厅分别为2.17 μT/m和1.15 μT/m。从该结果可以发现砖墙附近、走廊的地磁变化率相对较大。本文实验环境下的参考点聚类结果如图3所示。通过图3发现,室内的一些特殊位置例如门口、墙边、楼梯等地方是不同聚类的交接地带,也是分属不同聚类的零散点聚集区,说明了这些地带地磁变化率相对较大,形成了天然的“地磁分界线”。这些地带基本都靠近墙体,侧面印证了Michael Angermann等人的结论。本文实验环境下,位置区、切换区和缓冲区的划分见图3。图3中①代表BA缓冲Ⅱ區,②和③范围代表BA缓冲Ⅰ区;②代表BC缓冲Ⅱ区,①和④范围代表BC缓冲Ⅰ区。
本文利用这些 “地磁分界线”将整个定位范围划分成包含若干个聚类且每个类在地理位置上都连续的多个位置区,然后使定位终端在所处的位置区内进行匹配定位,这样就降低与待定位点距离较远但地磁矢量非常接近的点导致定位误差加大的风险。
本文将定位终端在图4中所处的区域称为位置区状态。两个位置区的切换是通过二者之间的切换区进行过渡。这些地磁变化率较大的地带地磁特征明显,当范围有限时进行匹配定位的准确率相比地磁变化率较小的空旷区域高一些。在定位过程中,本文依据连续多个定位点所落入的区域来判定目前终端的位置区状态,因此定位准确率高的地带容易准确判定位置区状态,可以设为切换区。切换区之外的区域为位置区。
