时速160公里刚性接触网定位点导高偏差研究
2024-01-08东升
东 升
0 引言
我国城市轨道交通发展迅速,由于刚性接触网系统具有零部件少、断线故障少及维护工作量小的优点,被广泛应用于城市轨道交通牵引供电系统[1]。目前国内刚性接触网运营最高速度达到160 km/h,列车高速运行时,弓网动态性能的优劣直接影响弓网系统的运营安全性。由于施工精度等多方面因素,刚性接触网定位点导高存在偏差,定位点导高偏差过大导致受电弓运行不平稳,会对弓网动态性能产生显著影响,因此有必要对160 km/h刚性接触网定位点导高偏差进行研究。
文献[2-4]基于有限元理论建立了刚性接触网与受电弓的仿真模型,并进行了静力分析与模态分析,得到刚性接触网的固有频率,利用弓网耦合模型对跨距、弓头刚度、弓头阻尼、悬挂结构等效刚度等弓网参数进行了研究。文献[5]进行了受电弓静态抬升力选取,并利用正交实验法对受电弓结构参数影响弓网受流性能的重要程度进行研究。文献[6]基于有限元法建立弓网仿真模型,分析了全锚段定位点刚度整体变化以及仅锚段关节处定位点变化时的弓网动态性能。文献[7-8]将刚性接触网悬挂结构等效为弹簧结构,受电弓结构等效为质量块模型,对跨距及悬挂结构刚度等进行了研究。文献[9]建立了弓网仿真模型,对160 km/h刚性接触网的跨距、定位点刚度、受电弓结构参数及关节类型进行研究。
目前并无相关文献对160 km/h刚性接触网定位点导高偏差进行研究。本文基于有限元理论与力学理论建立刚性接触网汇流排与悬挂结构的仿真模型,利用弓网仿真模型对160 km/h刚性接触网不同跨距时的定位点导高偏差进行研究,基于弓网动态性能评价指标,分析比较不同仿真工况的计算结果,得出160 km/h刚性接触网定位点导高偏差允许值。
1 弓网仿真模型
刚性接触网由汇流排、接触线、悬挂与定位结构等组成,接触线夹持在汇流排中。悬挂与定位结构分为门式悬挂结构与悬臂式悬挂结构。门式悬挂结构通常应用于地铁直流供电系统中;在速度等级达到160 km/h时,供电系统采用交流制式,绝缘距离增加,此时悬挂与定位结构通常采用悬臂式悬挂结构。刚性接触网锚段与锚段之间的重叠区段为锚段关节,锚段关节分为交错式锚段关节及膨胀元件式锚段关节。交错式锚段关节利用两锚段刚性接触网几何空间存在等高点,并将锚段末端抬高70 mm,保证受电弓从锚段之间顺利过渡,本文锚段关节采用交错式锚段关节。
采用有限元法构建刚性接触网仿真模型,并对模型进行简化。仿真建模时,将汇流排与接触线视为整体结构,采用欧拉梁beam单元建立汇流排仿真模型,如图1所示。悬臂式悬挂结构仿真模型可采用弹簧与质点结构构建,但在速度较高时,该建模方法与实际结构误差较大,因此采用梁单元将实际模型简化处理后进行建模,如图2所示。

图1 汇流排仿真模型
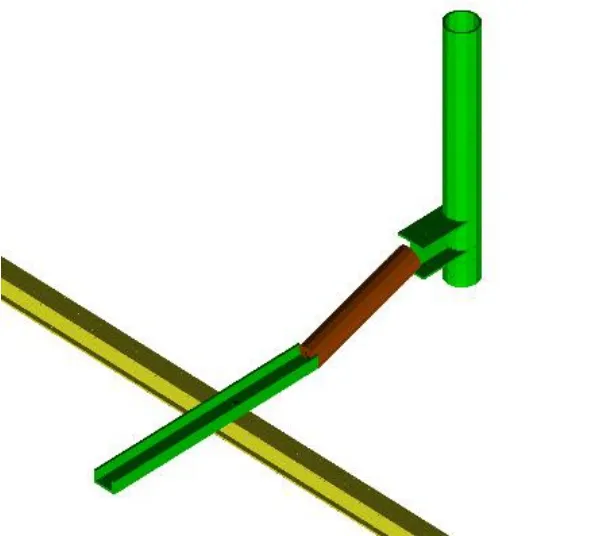
图2 悬臂式悬挂结构仿真模型
通过受电弓与接触线接触,获取电能为机车供电。目前采用的受电弓为单臂、双四连杆结构,由弓头、上框架、下臂杆、传动系统与底架等组成。受电弓仿真模型分为刚柔耦合模型、质点系模型等,考虑计算效率及计算精度,本文采用质点系模型。质点系模型为三质量块模型,采用质点-弹簧-阻尼结构,如图3所示(DSA250型受电弓)。

图3 受电弓三质量块模型
2 弓网动态性能评价指标
受电弓与接触线通过接触力相互接触,由于弓网系统的振动导致接触力时刻变化,接触力过大会导致弓网机械磨耗加剧,零部件振动加剧,影响服役性能;接触力过小会导致弓网离线,产生电弧,加剧弓网电气磨耗。因此为保证良好的弓网动态性能,接触力应在一定范围内波动。
弓网系统接触力是时刻变化的,通常使用弓网系统接触力数理统计值作为评价指标,其主要包括接触力最大值Fmax、接触力最小值Fmin、接触力平均值Fm、接触力标准偏差σ。文献[10]对弓网间相互作用的动态性能指标进行了规定:交流供电系统中速度等级v≤200 km/h,Fmax= 300 N,Fmin>0 N,Fm≤0.000 47v2+90,接触力标准偏差σ≤0.3Fm。当弓网接触力为0时,弓网系统出现离线,弓网动态性能较差。弓网系统不存在离线状态时,接触力标准偏差越小、最大值越小、最小值越大,则弓网系统受流性能越好。
3 定位点导高偏差研究
建立标准跨距分别为8、7 m的刚性接触网仿真模型,8 m跨距的锚段长度为497 m,7 m跨距的锚段长度为495 m。目前,针对刚性接触网定位点导高偏差的研究可以从全锚段定位点导高偏差为正态分布、定位点导高偏差及相邻定位点的导高偏差控制值入手,由于全锚段定位点导高偏差为正态分布的方式不能有效指导现场施工,因此采用定位点导高偏差及相邻定位点的导高偏差控制值进行研究。
假定定位点导高为5 300 mm,定位点导高偏差分别为±1、±2、±3、±4、±5、±6、±7、±8、±9、±10 mm,且相邻定位点的导高偏差分别不超过±1、±2、±3、±4、±5、±6、±7、±8、±9、±10 mm。
3.1 不同标准跨距下导高偏差仿真分析
受电弓以160 km/h速度通过2个8 m跨距的锚段,对接触力数据进行数理统计,得到接触力统计值,如表1所示。
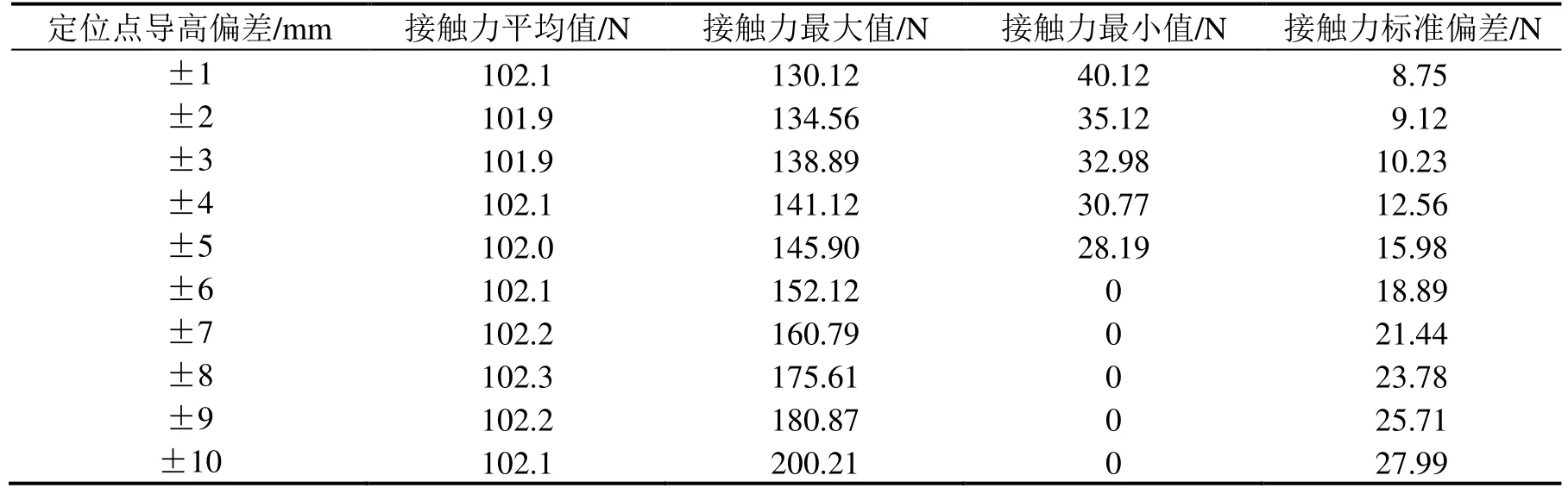
表1 标准跨距为8 m的弓网接触力统计
由表1可知,随着定位点导高偏差的增大,接触力最大值增大,最小值减小,标准偏差也增大,这表明弓网动态性能更差。当定位点导高偏差在±6 mm及以上时,接触力最小值为0 N,表明弓网系统出现离线状态,弓网之间已经不能良好受流。因此在标准跨距为8 m时,定位点导高允许偏差为±5 mm,且相邻定位点导高偏差不超过±5 mm。
受电弓以160 km/h速度通过2个7 m跨距的锚段,对接触力进行数理统计,得到接触力统计值,如表2所示。
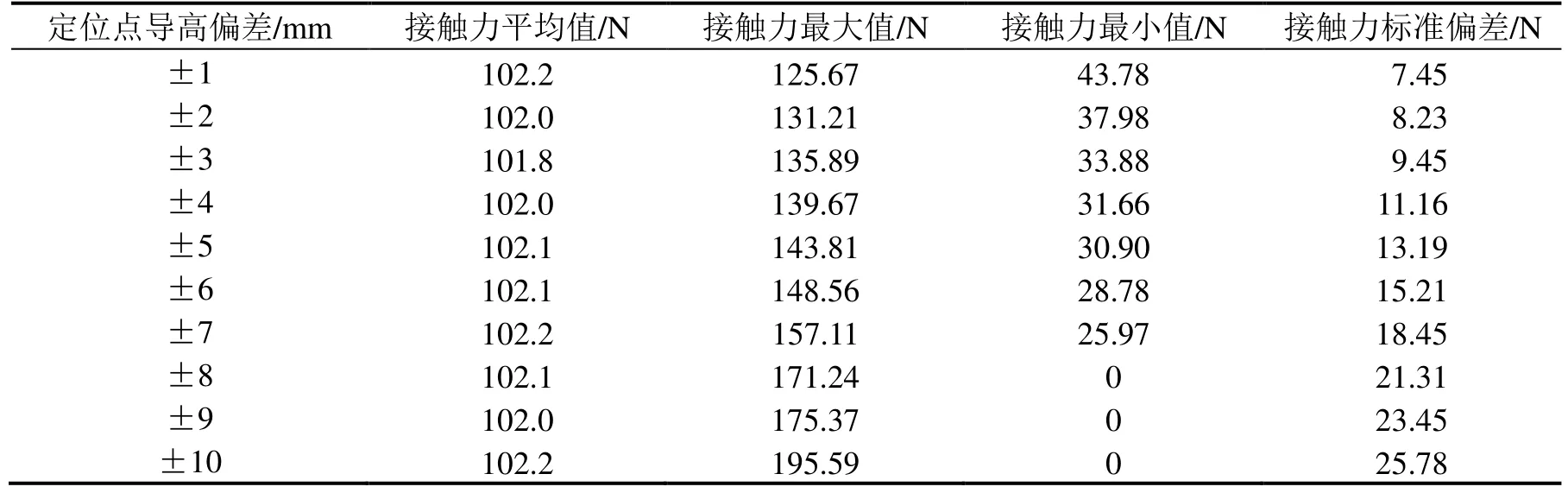
表2 标准跨距为7 m的弓网接触力统计
由表2可知,随着定位点导高偏差的增大,接触力最大值增大,最小值减小,标准偏差也增大,表明弓网动态性能更差。当定位点导高偏差在±8 mm及以上时,接触力最小值为0 N,表明弓网系统出现离线状态,弓网之间已经不能良好受流。因此在标准跨距为7 m时,定位点导高允许偏差为±7 mm,且相邻定位点导高偏差不超过±7 mm。
将不同标准跨距定位点导高存在偏差的弓网接触力标准偏差进行比较分析,如图4所示。

图4 不同标准跨距定位点导高偏差的弓网接触力统计
由图4可知,在同一定位点导高存在偏差时,随着跨距的增加,接触力标准偏差也增大,弓网动态性能越差。在不同定位点导高偏差的工况下,8 m跨距的接触力标准偏差均比7 m跨距的接触力标准偏差大,表明增大跨距需减小定位点导高偏差。
3.2 锚段关节处定位点导高偏差仿真分析
锚段关节是刚性接触网的薄弱环节,受电弓经过时产生剧烈振动,导致弓网接触力产生显著波动。减小锚段关节区段的4组定位点的导高偏差,可减小该区段弓网接触力的波动,提升弓网受流质量。假定锚段关节区段的4组定位点的导高偏差分别为±1、±2、±3、±4 mm且相邻定位点的导高偏差分别不超过±1、±2、±3、±4 mm,研究减小锚段关节区段的4组定位点导高偏差的弓网动态性能。
在标准跨距为8 m时,普通区段的定位点导高允许偏差为±5 mm,且相邻定位点导高偏差不超过±5 mm;在标准跨距为7 m时,普通区段的定位点导高允许偏差为±7 mm,且相邻定位点导高偏差不超过±7 mm;对比分析不同工况下的弓网动态性能。
对比分析不同工况下的弓网动态性能。对接触力进行数理统计,得到接触力统计值,如表3、表4所示。

表3 标准跨距为8 m时锚段关节区段4组定位点的导高偏差弓网接触力统计

表4 标准跨距为7 m时锚段关节区段的4组定位点的导高偏差弓网接触力统计
分别对比分析表1~表4可知,在标准跨距分别为8 m与7 m时,与全锚段定位点的导高偏差分别为5 mm与7 mm时相比,在减小锚段关节定位点导高偏差时,其弓网接触力标准偏差显著减小,弓网动态性能提升。
4 结论
通过建立受电弓与刚性接触网仿真模型,研究160 km/h速度下不同标准跨距下定位点导高偏差控制值,得到以下结论:
(1)随着定位点导高偏差的增大,接触力波动越剧烈,接触力最大值增大,接触力最小值减小,接触力标准偏差增大,弓网动态性能更差。
(2)160 km/h刚性接触网在标准跨距为8 m时,定位点导高允许偏差为±5 mm,且相邻定位点导高偏差不超过±5 mm;在标准跨距为7 m时,定位点导高允许偏差为±7 mm,且相邻定位点导高偏差不超过±7 mm。
(3)在同一定位点导高偏差下,随着跨距的增加,接触力标准偏差增大,弓网动态性能变差。为保证良好的弓网动态性能,增大跨距则需要减小定位点导高偏差。
(4)为保证更加良好的弓网动态性能,应减小锚段关节区段4组定位点的导高偏差,建议工程实施时锚段关节区段4组定位点的导高偏差不超过±3 mm,以保证受电弓的运行轨迹更加平稳。
