改进和声搜索-遗传算法的机械臂鲁棒控制*
2017-11-30牛莉莉
牛莉莉
(北华大学 机械工程学院,长春 132021)
改进和声搜索-遗传算法的机械臂鲁棒控制*
牛莉莉
(北华大学 机械工程学院,长春 132021)
为了提高机械臂系统的控制性能和鲁棒性,文章提出了基于改进和声搜索-遗传算法的鲁棒控制方法。介绍了D-H坐标法,建立了机械臂系统的运动学和动力学方程;提出了自适应遗传算法,使算法的交叉变异概率自适应调整,保证了算法的搜索效率和稳定性;提出了改进和声搜索-遗传算法的鲁棒控制方法,经实验可以看出,基于改进和声搜索-遗传算法的鲁棒控制器在调节时间、超调量、稳态误差上表现优异;当存在外部干扰时,与其它鲁棒控制器相比,改进和声搜索-遗传算法的鲁棒控制器在调节时间、关节最大变换量上表现出优势,具有更好的鲁棒性。
机械臂;运动鲁棒控制;改进遗传算法
0 引言
机器人是一门综合性工程科学,涵盖了计算机科学、机械科学、控制科学、人工智能等多门学科[1]。机械臂是相对简单的机器人技术,它可以代替人类进行重复性工作,将人类从简单重复的体力劳动中解放出来;对于企业来讲,使用机械臂进行生产,生产成本要远远低于人力资源。因此使用更优的机械臂运动控制方法,提高机械臂的控制性能,对于提高企业生产质量及效率具有重要意义。
对机械臂运动控制的目标包括减少稳定时间、提高稳态精度、减少超调量、提高鲁棒性等。机械臂控制的研究可以分为经典控制、现代控制、鲁棒控制三个阶段,经典控制适应于单输入单输出的线性时不变系统;现代控制是建立机械臂系统的状态空间方程,依据系统内部运行规律进行优化;鲁棒控制就是在经典或现代控制理论基础上,考虑机械臂系统可能存在的不确定因素进行控制。而且鲁棒控制器设计是对不确定性的非精确模型分析基础上进行的,是当前研究的热点。文献[2]针对机械臂在轨运行时重力加速度不同提出了自适应鲁棒控制方法,但是此方法在控制时震荡次数较多;文献[3]设计了空间漂浮柔性机械臂的奇异摄动鲁棒控制器,但是其对柔性模态的稳定过程较慢;文献[4]使用观测器设计了柔性机械臂的鲁棒控制器,但是柔性振动幅度较大、调整时间略长。
本文为了提高机械臂系统控制性能(调节时间、超调量、稳态误差)和鲁棒性,分析了机械臂系统,建立了其运动学和动力学模型;给出了遗传算法的自适应改进方法,在此基础上提出了和声搜索-遗传算法,并使用此方法给出了鲁棒控制器,经分析,本控制器具有很好的控制性能和鲁棒性。
1 机械臂建模
1.1 D-H坐标法
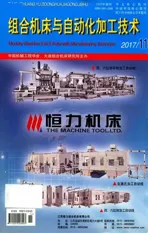
串联机械臂由运动副和杆件组成,除最后一个杆件外,其余杆件两端都有运动副与其他杆件或基座相连,一般将最后一个杆件称为末端执行器。为了对机械臂的运动进行描述,首先对杆件和运动副进行编号,对于具有n个杆件和n个运动副的机械臂,将杆件编号为1,…,n,将运动副编号为1,2,…,n,运动副i连接杆件i-1和杆件i,杆件1通过运动副1与固定基座相连。在机械臂系统上建立n+1个坐标系Fi,i=1,2,…,n+1,坐标系Fi固连在杆件i-1上,F1为基座坐标系,记坐标系Fi原点为Oi,三轴分别为(Xi,Yi,Zi),坐标系的建立方法为:Zi轴为第i个运动副的轴,其正方向任意选取;Xi轴由Zi轴和Zi-1轴决定,按照Zi轴和Zi-1轴的不同情况,Xi轴的定义方式如图1所示。
(a)两线异面 (b)两线相交 (c)两线平行 图1 X轴定义方法(清晰图)
图1a表示ii=Xi-1×ki轴和Zi-1轴异面,Xi轴与两线相交且垂直,方向为由Zi-1轴指向Zi轴;图1b表示Zi轴和Zi-1轴相交,Xi轴与两线垂直且过两线交点,方向为ki-1×ki决定的方向;图1c表示Zi轴和Zi-1轴平行,Xi轴在两线平面内与两线垂直且过Oi-1点,方向为由Zi-1轴指向Zi轴。Fi坐标系的Yi轴与Xi、Zi成右手定则。
1.2 机械臂运动学方程

(1)
式中,nx、ny、nz为向量n在坐标系F1中的坐标,其余向量具有相同含义。
记杆件i的长度为ai,为杆件两端转轴中心点的距离;杆件i和杆件i-1的距离为di,为两杆公共法线在Zi轴上的位置差;杆件i和杆件i-1的夹角为θi;杆件i的扭角αi定义为两运动副轴线在ai垂直平面内投影的夹角。那么经过以下四步就可以从坐标系Fi-1转换到坐标系Fi:①绕Zi轴旋转θi;②沿Zi轴平移di;③沿Xi轴平移ai-1;④绕Xi轴旋转αi-1。经过以上分析,从坐标系Fi-1到坐标系Fi的转换矩阵为:

1.3 机械臂动力学方程

(2)
式中,L=K-P为拉格朗日算子,τk为机械臂的输入力矩。通过矩阵变换解此动力学方程,得:

(3)
2 改进遗传算法
遗传算法模拟动物繁殖遗传过程中基因交叉变异、自然选择优胜劣汰的过程,算法包括编码、选择、交叉、变异、解码等步骤[6-8]。
算法中交叉概率Pc和变异概率Pm对算法影响很大。交叉概率Pc过大时,种群中最优个体容易因交叉操作被破坏,使算法难以寻到最优解,若交叉概率Pc过小时,个体过于稳定而变化过小,算法搜索效率降低。为了解决这个问题,本文提出了交叉概率Pc的自适应调整方法,当交叉概率过大时则减小交叉概率,当交叉概率过小时则增大交叉概率,使交叉概率维持在一个相对稳定区间,即:
(4)
式中,K1、K2为交叉调整值,且有K2>K1,fmax为种群中的个体适应度的最大值,f′为交叉操作中适应度较大的值,favg为种群中所有个体适应度的平均值。
变异操作如同遗传过程中的基因变异过程,毫无依据、完全随机[9]。变异操作可以使群体快速产生新解,在大范围内搜索到最优解;但是若变异概率Pm过大,则算法就像随机搜索算法一样毫无章法,失去了遗传算法中“遗传”的意义,失去了对优势解的遗传和继承;若变异概率Pm过小,则算法产生难以产生新解,算法搜索效率降低,则本文提出变异概率Pm的自适应调整方法为:
(5)
式中,K3、K4为变异调整值,f′为变异操作的适应度值。
3 改进和声搜索-遗传算法的控制器
3.1 控制器设计
使用PID控制器[10]对机械臂运动进行控制,示意图如图2所示。
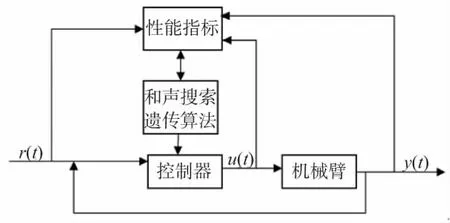
图2 控制器框架
此PID控制器的控制模型为:
(6)


(6)
控制的目标是在满足力学约束条件下,选取合适的控制力矩,使目标函数最优。记机械臂系统的理想输出为r(t),实际输出为y(t),则误差e(t)=r(t)-y(t),考虑控制误差、控制能量、上升时间三个因素,提出目标函数J为:
(7)
式中,u(t)为控制器输出,也是机械臂系统的输入力矩;tu为上升时间,用于表征机械臂的调节时间;w1、w2、w3为各因素权值,权值的选取根据优化目标的偏向进行调整,加大关注因素的权值。
3.2 改进和声搜索-遗传算法
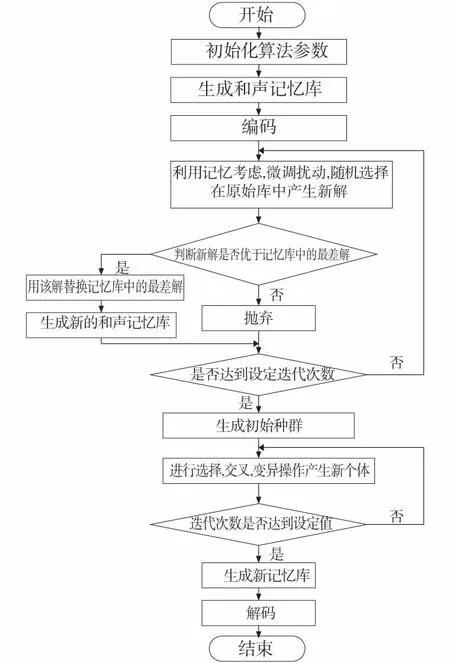
图3 改进和声搜索-遗传算法流程(visio版)
和声搜索-遗传算法就是使用和声搜索算法产生和声记忆库,然后使用记忆考虑、微调扰动、随机选择等操作产生新解,比较新解与记忆库中最差解的适应度值,若优于最差解则替换最差解,否则循环此操作直至达到算法最大迭代次数,此时完成了遗传算法初始种群的设置,从此流程可以看出,对和声记忆库中最差解的迭代替换,可以不断提高整个记忆库中和声的适应度值,使遗传算法的初始种群不断得到优化。通过和声搜素算法对遗传算法初始种群的优化,使遗传算法的初始种群具有更好的适应性、均匀性和分散性。算法具体流程如图3所示。
3.3 算法实现
(1)参数初始化。算法参数分为和声搜索算法和遗传算法两个部分,和声搜索算法参数包括和声记忆库MH、和声选择概率PHMCR、音高调节概率PPAR、算法迭代次数N1;遗传算法参数包括交叉概率Pc、变异概率Pm及算法最大迭代次数N2。
(2)适应度函数确定。根据前文分析,使用式(7)给出的目标函数J作为适应度函数。
(3)初始化和声记忆库。确定和声库内和声的数量记为SHM,随机产生如此数量的和声并将其存放在记忆库MH中。

(5)和声操作[11-12]。初始和声随机产生,方法为:
(8)

(7)交叉变异。对第i个个体和第i+1个个体进行交叉操作,即执行:
(9)
(8)解码。重复遗传算法相关步骤直至达到算法最大迭代次数N2,选择最优和声E(aBEST)=(aPBEST,aIBEST,aDBEST)进行解码,得到机械臂控制最优力矩。使用此最优力矩对机械臂控制器进行实时控制。
4 仿真实验
4.1 实验设计
本文仿真实验用的机械臂为6连杆和6运动副的机械臂,如图4所示。
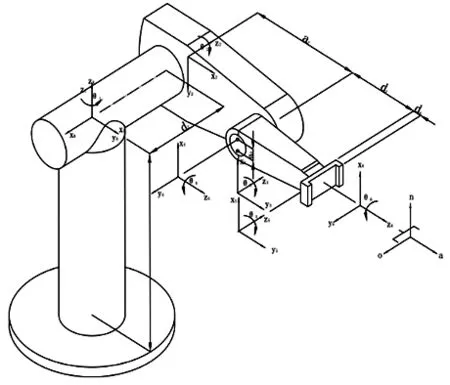
图4 试验机械臂
本文共进行了两组实验,一是使用阶跃输入,检验本文控制器的控制效果;二是施加外界干扰,检验本文控制器的鲁棒性。
参数初始化。KP∈[0,20],KI∈[0,30],KD∈[0,20],算法精度ε=0.001,w1=0.999,w2=0.001,w3=100,SHM=100,N1=100,N2=200,PHMCR=0.68,PPAR=0.55。
4.2 实验结果及分析
系统的阶跃响应曲线和优化函数曲线如图5所示。
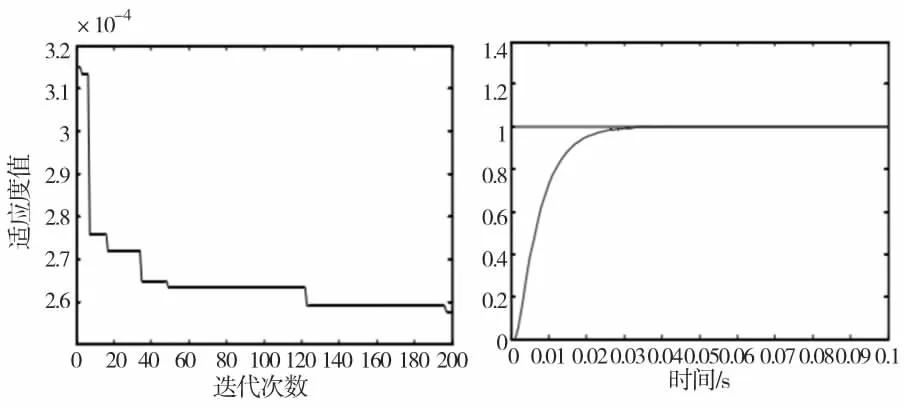
(a)适应度函数曲线 (b)阶跃响应 图5 阶跃输入实验结果
使用改进和声搜索-遗传算法对机械臂进行控制的各关节控制性能指标如表1所示。
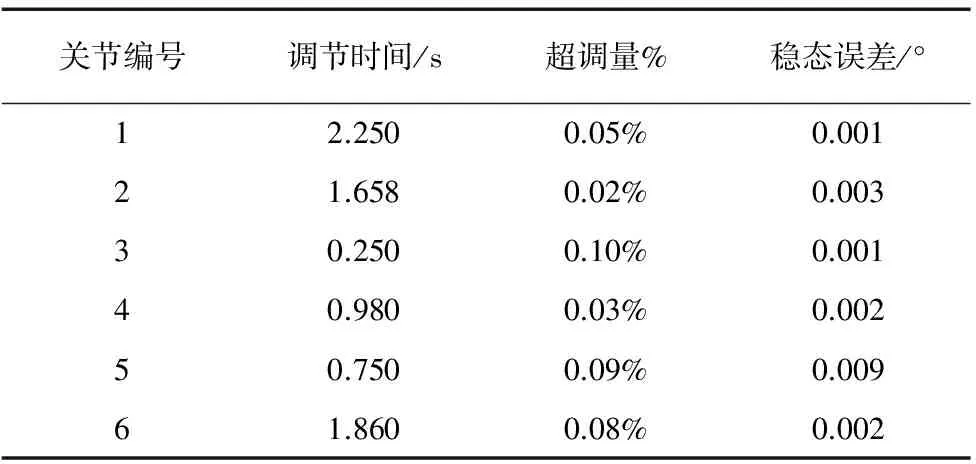
表1 各关节性能指标
由图5a可以看出,随着算法的搜索,适应度值不断减小,说明随着融合算法的进行,算法的搜索结果不断接近最优解;由表1可以看出,各关节最大调节时间出现在关节1上为2.25s,最大超调量出现在关节3上为0.1%,稳态误差最大值出现在关节5上为0.009°,从调节时间、超调量、稳态误差上看,本文设计的控制器具有很好的控制性能。
为了对算法的鲁棒性进行分析,表2给出的不同鲁棒控制器对外界扰动的调节时间和调节过程中最大的关节变换量。
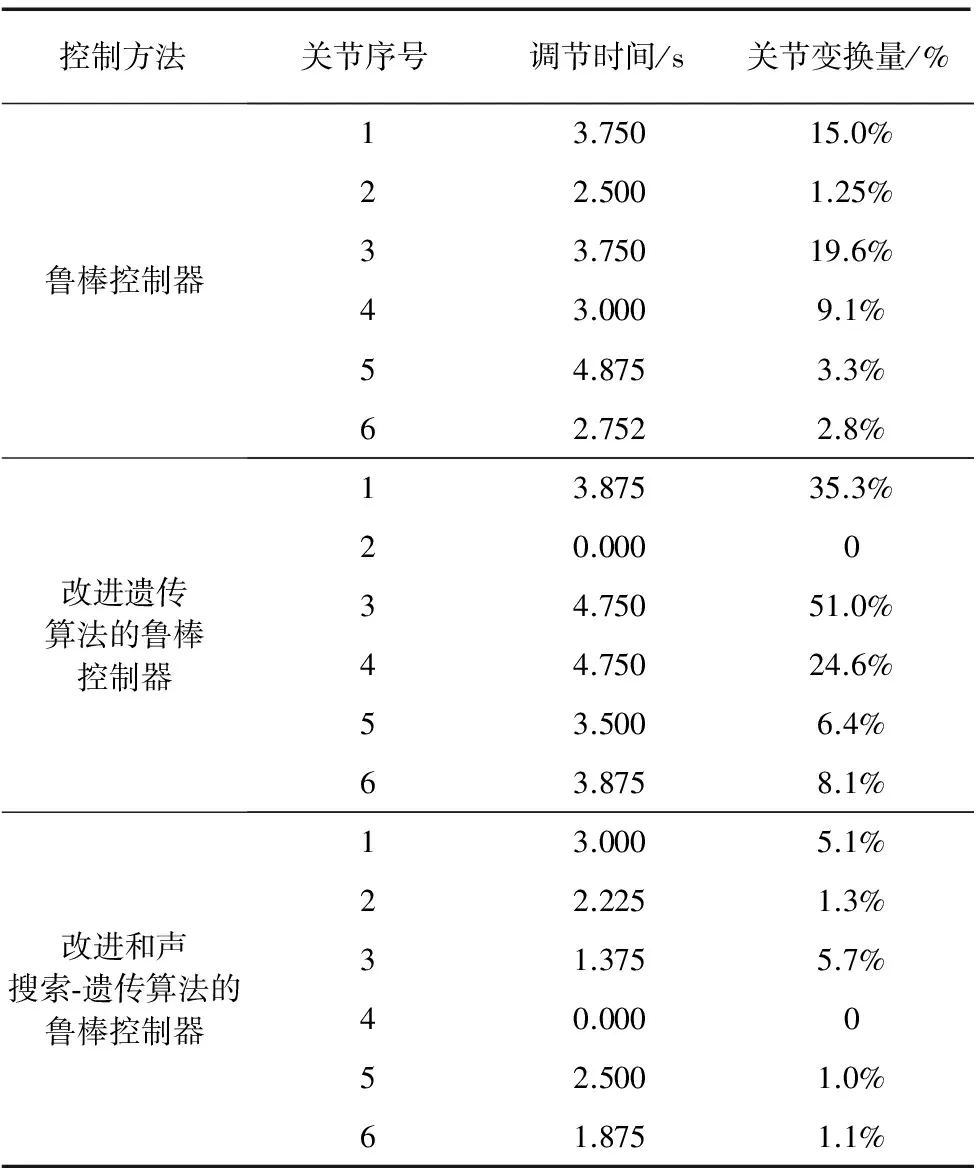
表2 不同控制器各关节性能指标
表2中给出了三类鲁棒控制器,一是普通鲁棒控制器,二是基于改进遗传算法的鲁棒控制器,三是基于改进和声搜索-遗传算法的鲁棒控制器。从表中的统计数据可以看出,改进和声搜索-遗传算法鲁棒控制器相对于另外两个控制器,各关节在调节时间和调节过程中的关节最大变换量均具有明显优势,这是因为使用和声搜索算法初始化遗传算法种群,使算法种群具有更好的均匀性和分散性,有利于算法搜索,而且提出了自适应的交叉变异概率调节方法,使交叉变异概率稳定在某一范围内,既保证算法搜索效率又保证算法稳定性,最终使搜索到的控制参数最优,在调节时间和关节变换量上均具有明显优势。
5 结论
本文在提出自适应遗传算法的基础上,提出了改进和声搜索-遗传算法的鲁棒控制器,可以得到以下结论:①自适应调节遗传算法的交叉概率和遗传概率,使概率稳定在某一范围内,既保证算法搜索效率,又保证了算法稳定性;②使用和声搜索算法给出遗传算法初始种群,使初始种群具有均匀性和分散性,使算法具有更好的搜索性能;③改进和声搜索-遗传算法鲁棒控制器能够搜索到最优解,在机械臂系统控制中具有很好的控制性能和很好的鲁棒性。
[1] 王国彪, 陈殿生, 陈科位,等. 仿生机器人研究现状与发展趋势[J]. 机械工程学报, 2015, 51(13):27-44.
[2] 刘福才, 高娟娟, 王芳. 地面装调的空间机械臂在空间应用时的自适应鲁棒控制[J]. 控制理论与应用, 2013, 30(1):69-76.
[3] 于潇雁, 陈力. 参数不确定与有界干扰自由飘浮柔性空间机械臂基于速度观测器的奇异摄动鲁棒控制及振动抑制[J]. 振动与冲击, 2015, 34(14):85-92.
[4] 于潇雁, 陈力. 基于观测器的柔性两杆空间机械臂鲁棒控制[J]. 系统仿真学报, 2016, 28(7):1520-1527.
[5] Hean C R, Fahrenthold E P. Discrete Lagrange equations for reacting thermofluid dynamics in arbitrary Lagrangian-Eulerian frames[J]. Computer Methods in Applied Mechanics & Engineering, 2017, 313(10):303-320.
[6] 杜钊君, 吴怀宇, 韩涛,等. 基于遗传算法的移动机械臂轨迹优化研究[J]. 机械设计与制造, 2013(5):133-136.
[7] 曹凯, 陈国虎, 江桦,等. 自适应引导进化遗传算法[J]. 电子与信息学报, 2014, 36(8):1884-1890.
[8] 刘宗泽. 基于和声搜索的机械臂控制优化算法研究[D]. 哈尔滨:哈尔滨理工大学, 2017.
[9] Banerjee A, Guria C, Maiti S K. Fertilizer assisted optimal cultivation of microalgae using response surface method and genetic algorithm for biofuel feedstock[J]. Energy, 2016, 115(9):1272-1290.
[10] 王彦, 邓勇, 王超. 基于改进粒子群算法的模糊神经网络PID控制器设计[J]. 控制工程, 2012, 19(5):761-764.
[11] 夏红刚, 欧阳海滨, 高立群,等. 全局竞争和声搜索算法[J]. 控制与决策, 2016, 31(2):310-316.
[12] 杨佳. 和声搜索算法及其在多目标优化问题中的应用研究[D]. 合肥:合肥工业大学, 2013.
ManipulatorMotionRobustControlBasedonImprovedHarmonySearch-GeneticAlgorithm
NIU Li-li
(School of Mechanical Engineering, Beihua University, Changchun 132021, China)
To improve control performance and robustness of manipulator system, robust controller based on improved harmony search-genetic algorithm is proposed. D-H coordinate is introduced, and kinematics and kinetic equation of manipulator system are built. Adaptive genetic algorithm is put forward, which make crossover probability and mutation probability adjust adaptively, search efficiency and stability of algorithm is curtained. Robust controller based on improved harmony search-genetic algorithm is raised. By trail, the robust controller possesses excellent performance on setting time, overshoot, and steady error. When external disturbance existing, the robust controller possesses excellent performance on setting time and maximum joint transform distance, which means the robust controller possesses better robustness.
manipulator; motion robust control; improved genetic algorithm
1001-2265(2017)11-0069-04
10.13462/j.cnki.mmtamt.2017.11.018
2017-06-23
2017-07-21
国家自然科学基金项目(61175113)
牛莉莉(1978—),女,辽宁瓦房店人,北华大学讲师,硕士,研究方向为工艺设计,(E-mail)3155207659@qq.com。
TH112;TG659
A
(编辑李秀敏)