直驱进给系统摩擦力特性的辨识研究*
2017-11-30张云龙杨庆东张栋梁
张云龙,杨庆东,张栋梁
(北京信息科技大学 自动化学院,北京 100192)
直驱进给系统摩擦力特性的辨识研究*
张云龙,杨庆东,张栋梁
(北京信息科技大学 自动化学院,北京 100192)
文章重点研究直驱进给伺服系统的摩擦力特性辨识问题。着重介绍了摩擦力的非线性特性,给出了其模型,定性分析其对系统的不利影响。同时,指出了在低速和高速进给时的负载力和速度对系统非线性摩檫力的作用。文章针对摩擦力非线性辨识问题,采用Var Der Pol方程求解方法进行相关分析与辨识,分析了摩擦力非线性特性的特点,给出了其非线性判据。摩擦力对系统非线性作用,主要体现在低速段,它使系统出现自激振动从而导致系统出现爬行现象,系统陷入失稳状态。负载力在高速段,对系统摩擦力的影响比较明显。通过试验,验证了摩擦力非线性特性辨识的合理性和正确性,摩擦力受速度和负载力的影响较为明显。
直驱进给;摩擦力;自激振荡 ;Var Der Pol方程
0 引言
非线性摩擦力是永磁同步直线电机驱动系统的非线性主要因素之一,在进给系统研究中是不可避免的问题,进给系统受摩擦力非线性扰动作用非常明显,这种扰动严重影响数控机床的加工精度、机床寿命,也加速机床切削刀具的磨损[1-3]。因此,为了提高进给伺服系统的精度,识别进给系统摩擦力的非线性特性是至关重要的。文献[4-6]针对直线电机驱动摩擦力的非线性,建立了线性化模型,这种方法的不足是将系统摩擦力线性化,不能准确反映摩擦力特性;文献[7]采用实验和回归的方法辨识摩擦力模型特性,对数学模型进行简化,这就影响系统的准确性;文献[8-9]采用静态摩檫力模型及其辨识的方法,这种方法未考虑摩擦力的动态特性,不能充分考虑摩擦力对系统的动态影响;文献[10]提出了根据线性模型再进一步实现非线性特性评估的方法,缺点是过程繁琐且辨识精度受线性模型影响较大。
本文为了研究直驱伺服系统的摩擦力非线性特性问题,首先给出了直驱进给驱动器的结构,着重研究摩擦力的非线性特性,采用Van Der Pol方程求解方法进行相关分析与辨识,分别考虑了速度和负载力对系统摩擦力非线性特性的影响,目的是找出其规律,为数控机床动态系统辨识提供依据。
1 直驱伺服系统结构
直驱进给伺服系统结构图如图1所示,系统采用电流环、速度环和位置环的三环控制方式,达到精确控制目的。其中,电流环采用的动子磁场定向控制方式,电流调节器输出两轴控制电压。根据速度误差大小,速度环使用速度调节器进行调节,减小速度跟随偏差。位置环由位置调节器和其计算单元组成,位置调节器根据误差的大小采用的是纯比例P进行调节,达到抑制位置超调的目的。
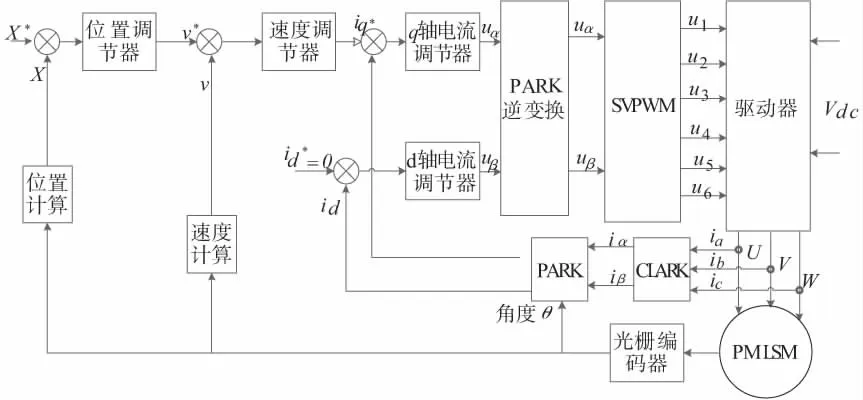
图1 直驱进给伺服系统结构图
2 直线电机的摩擦力特性
2.1 PMLSM的数学模型
直驱进给系统的直线电机是一个非线性、多变量、强耦合的被控对象,其非线性主要因素有摩擦力、推力波动等。在矢量控制下,电机的推力和推力电流成正比。根据直线电机的运动原理,其动力学方程可表示为:
(1)

2.2 摩擦力对直线电机非线性的影响
2.2.1 摩擦力的描述
如图2所示,摩擦力随速度变化的Stribeck曲线图,摩擦力的变化阶段分别为:Ⅰ静摩擦力、Ⅱ边界润滑、Ⅲ混合油膜润滑、Ⅳ流体动力润滑等4个阶段。
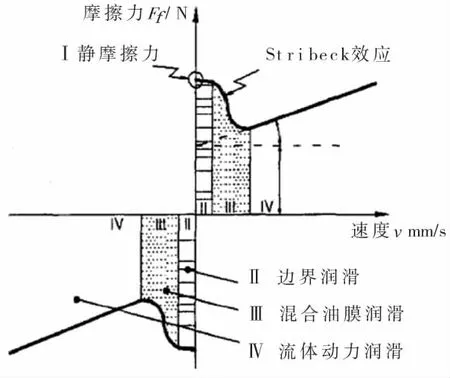
图2 摩擦力随速度变化图
最大静摩擦力到滑动摩擦力不是突变的,而是一个负阻尼特性的连续变化,这就是Stribeck现象[11]。因此,本文采用Stribeck摩擦力模型表示:
(2)


(3)
回忆到这里,小伊有点骄傲地眯住眼睛,他已经成为那个城里最出色、也是最年轻的DJ,只有在指尖划过磁盘的一刹那,他才感到自己是鲜活的,虽然在外人看来,他们这群人是整个社会的蛀虫,用青春中最好的年华去放纵、沉沦。小伊清楚地记得曾有一位中年妇女一手拎着菜篮子一手对眼前这个染着金色头发和画着眼线的“另类”指指点点,并告诫她的儿子:“你可不能腐化至此。”你才是真正的腐化,小伊在心里想道,只为了你的儿子和丈夫毫无尊严的活着,只会平凡地买菜烧菜,这样的活着才是真正的毫无尊严。

(4)
由以上公式可知,摩擦力是非线性的,式中的系数随工作点在摩擦力曲线上所处区段不同而不同。
2.2.2 摩擦力的非线性特性
为简化分析,忽略负载力,集中研究非线性摩擦力对系统速度变化的动态特性影响。
(1)当工作点在摩擦力曲线的区域Ⅳ时,摩擦力特性是与速度成线性关系,此时,c′>0,c″=c‴=0,带入式(4),得
(5)
将式(5)带入式(1),不考虑驱动力和负载力,其自由振动方程为:
(6)
可以看出式(6)是线性方程,因此可以判断摩擦力在此阶段相当于增加了系统的阻尼系数。
(2)当工作点在图2区域Ⅱ或Ⅲ时,摩擦力特性是非线性的,此时,c′<0,c″→0,c‴>0,由以上的分析方法可以得到:

(7)
则式(7)又可以整理为以下形式,
(8)
式(8)是Van Der Pol方程,求解此类方程的周期解、分叉和混沌,可以借用成熟的理论与方法,进行求解[12]。Van Der Pol方程存在极限环,如图3所示。
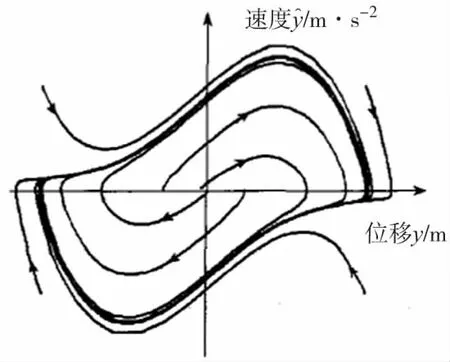
图3 方程的极限环曲线图
式(8)的特征根为:

(9)
分析式(9),当ε>0时,工作点是不稳定的相对平衡点,在极限环的范围内,从工作点近旁出发的轨迹线式发散的;相反,当ε<0时,此时的工作点所处状态是稳定的。
(3)当工作点在图2的区域Ⅰ时,摩擦力对系统的影响是系统的阻尼瞬间陡增,限制系统的动态响应。
2.3 摩檫力非线性特性的判据
数控机床在直线电机进给驱动时,在有些进给情况下,摩擦力的非线性特别明显,严重影响数控机床的加工。结合以上的分析,可以得出系统的摩檫力非线性特性判据,分别是:
判据1:系统是否出现自激振荡,自激振荡则会出现极限环,因此,可以用极限环判断系统摩擦力非线性的程度。
判据2:系统的超调量是否过大,超调量可以根据推力的波动量来判断。
3 试验验证
3.1 实验平台搭建
如图4所示,实验平台主要有5个部分组成:①一台PC机和一块数据采集板卡,数据采集板卡的采样时间可以灵活调节,最小采样时间为1ms;②PMAC运动控制卡,作为控制器控制,并与PC机通信;③一台永磁同步直线电机,相关电机参数如表1所示;④激励振荡器JZK-30,振幅200N;⑤砝码,当做直线电机的负载,大小分别为:5kg、20kg和25kg。
本文针对永磁直线同步电动机做出的研究,其型号及参数如表1所示。
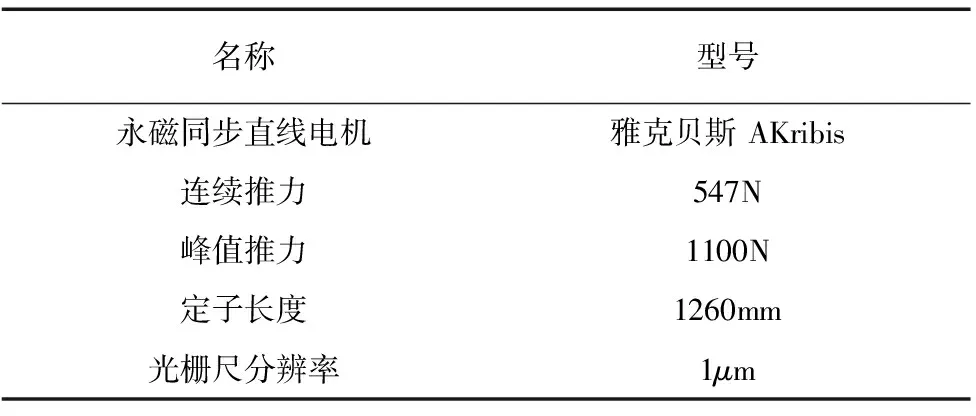
表1 永磁直线同步电动机型号

图4 非线性域研究实验平台
3.2 实验结果与分析
3.2.1 极限环的实验
激振器施加对工作台振幅的激振力,适当地调节激振频率,测量直线电机的震动速度,并记下工作台在不同位置的位移。以位移为横轴,速度为纵轴,绘得受迫震动方程相图,如图5所示。
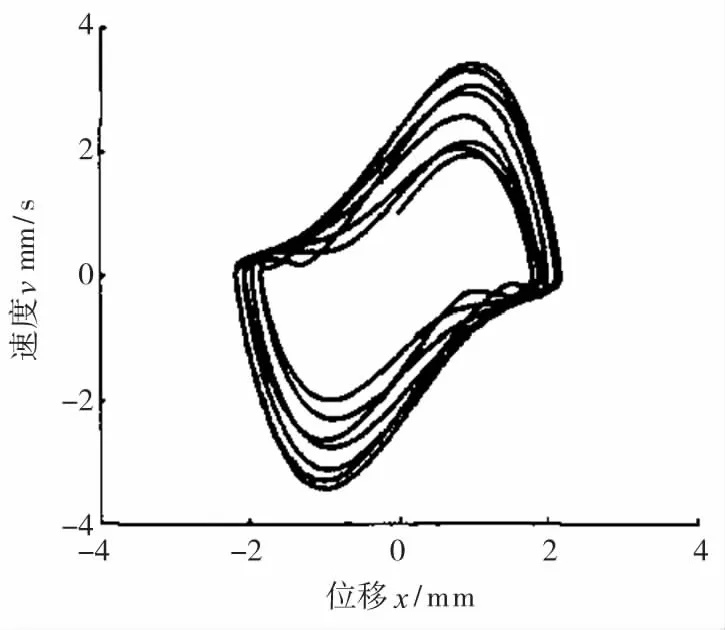
图5 平台受迫振动的相图
由图5可以看出,图5与图3相似度很高,符合方程的特点,表明极限环的存在,满足判据1。由此可以推断:当工作台工作在低速进给时,外部条件满足自激振荡的条件时,自激现象会导致系统出现爬行现象,从而系统失稳。
3.2.2 推力波动实验
为了验证判据2,从而说明直驱伺服系统非线性域的存在性,研究永磁同步直线电机的推力随速度的变化曲线,其曲线如图6、图7所示。
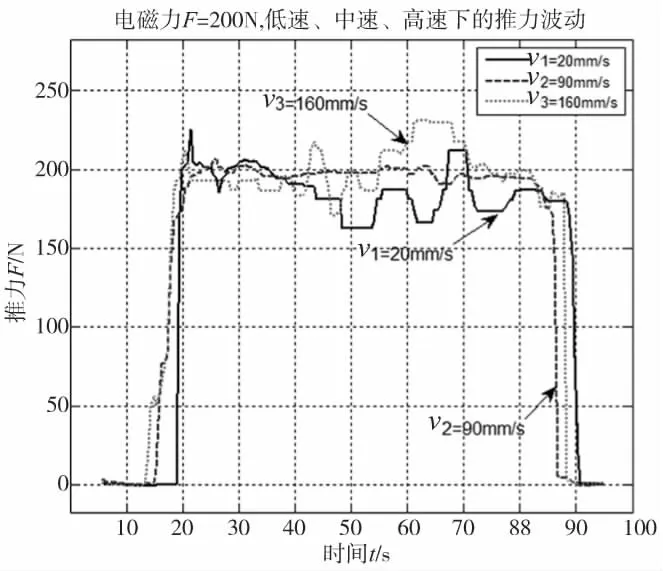
图6 永磁同步直线电机推力随速度的变化曲线
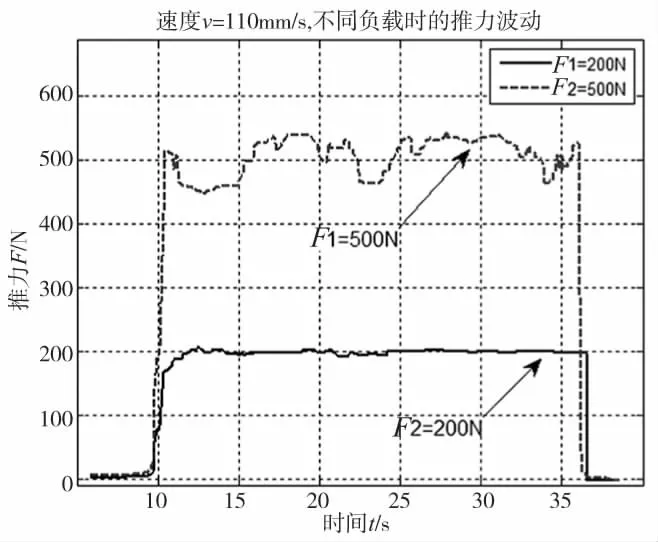
图7 不同负载的推力波动曲线图
由图6可以得出,在同一负载的情况下,在低速和高速时的推力波动量较大,波动幅度大于,严重影响机床加工精度;由图7分析得到,在相同速度和不同负载的情况下,大负载的推力波动量较大,波动幅度超过最大门限值。由此可以推断,判据二的得到验证。
4 结论
本文研究直驱进给伺服系统摩擦力非线性特性,采用Var Der Pol方程求解方法进行相关分析与辨识,辨识得出摩擦力工作在不同区域,非线性特性表现明显差别。给出摩擦力的非线性特性判据,为了证明判据的正确性,做了激励震荡和推力波动试验,试验说明了直驱进给伺服系统在低速和高速段运行时,摩擦力对系统的影响比较显著。经过分析,摩擦力的非线性在低速段增加了系统的负阻尼系数,有可能导致系统失稳。在系统高速运行段,变负载对摩擦力的影响,会带来系统的不稳定性。本文通过辨识直驱进给系统摩擦力的非线性特性,为数控机床系统的动态辨识提供依据。
[1] 赵国平,吴红星,张立华,等. 永磁同步直线电机直接驱动控制技术[J].微电机,2013,46(8):72-78.
[2] 刘德君,郭庆鼎,翁秀华.数控机床直线电机进给伺服驱动的摩擦力和扰动抑制措施[J]. 组合机床与自动化加工技术,2004(12):69-73.
[3] 甄文喜,戴跃洪,唐传胜.永磁同步直线电机伺服系统负载扰动建模与抑制[J].组合机床与自动化加工技术, 2013(2):7-10.
[4] 汪春梅.一种考虑摩擦力影响的伺服系统模型辨识方法[J].重庆理工大学学报(自然科学),2014 28(11):111-115.
[5] 郑言海,庄显义,强盛,等.考虑摩擦力影响精密伺服系统的鲁棒自适应控制[J]. 自动化学报,2002,28(3):445-449.
[6] 周璐,银朝霞,李岩.永磁同步直线电机模型参考自适应动子质量辨识[J].无线互联科,2014(5):125-126.
[7] 赵金生,张帆,刘品宽.基于Lugre模型的直线电机摩擦参数辨识和补偿[J].机电一体化,2016(10):13-17.
[8] 麻恒进,孟凡军,李碧政,等.一种惯导测试转台摩擦力模型及其参数辨识方法[J].航空精密制造技术,2014 (6):22-25.
[9] CANUDAS D W C,LISCHINSKY P.Adaptive friction com pensation with partially known dynamic friction model[J]. IEEE/ASME Transactions on Mechanicals,2011:47-51.
[10] 刘栋,陶涛,梅雪松,等.伺服系统线性特性和非线性摩擦的解耦辨识方法研究[J].仪器仪表学报,2010,31(4):782-788.
[11] 蔡钊勇,刘成颖.直线电机驱动进给系统摩擦力补偿研究[J].组合机床与自动化加工技术,2016(1):52-54.
[12] Yang Yongge, Xu Wei. Stochastic response of van der Pol oscillator with two kinds of fractional derivatives under Gaussian white noise excitation[J]. Chinese Physics B. 2016,25(2):9-11.
IdentificationofFrictionCharacteristicsofDirectDriveFeedSystem
ZHANG Yun-long,YANG Qing-dong,ZHNAG Dong-liang
(School of Automation,Beijing Information Science and Technology University,Beijing 100192,China)
This paper focuses on the identification of friction characteristics of direct drive feed servo system. The nonlinear characteristics of friction force are introduced emphatically, given its model and qualitatively analyze the adverse effects on the system Meanwhlie, the role at low speed and high speed feed load force and speed of the nonlinear friction force of the system is introduced. Aiming at the problem of nonlinear friction identification, using Var Der Pol equation solving method is to correlate analysis and identification. The characteristics of nonlinear friction force are analyzed, and the nonlinear criterion is given. The nonlinear effect of friction force on system is obvious at the low speed and causes the system to appear the self-excited vibration thus causes the system to crawl. The influence of the load on the system friction is obvious . The rationality and correctness of the identification of nonlinear characteristics of friction force are verified by experiments. It is obvious that the friction force is affected by the speed and the load force, which provides a theoretical basis for the practical engineering.
direct drive feed; friction; self excited oscillation;Var Der Pol equation
1001-2265(2017)11-0016-03
10.13462/j.cnki.mmtamt.2017.11.005
2016-12-29;
2017-01-17
国家自然科学基金(51575056;51405026)
张云龙(1989—),男,安徽阜阳人,北京信息科技大学硕士研究生,研究方向为直驱进给伺服系统控制,(E-mail)zhangyunlong365@163.com。
TH117;TG506
A
(编辑李秀敏)