基于五轴机床旋转干涉的旋转路径优化算法*
2017-11-30周康
周 康
(北京航空航天大学 机械工程及自动化学院,北京 100191)
基于五轴机床旋转干涉的旋转路径优化算法*
周 康
(北京航空航天大学 机械工程及自动化学院,北京 100191)
针对AC/BC五轴数控机床旋转轴不合理运动引发的干涉现象,提出一套基于五轴机床旋转干涉的旋转角优化算法,该算法能够自动计算出一条最优的旋转路径,为解决旋转干涉问题提供理论支撑。首先,根据五轴机床旋转运动方程及机床行程,得到解的特性;其次,分析旋转干涉产生的机理,给出旋转干涉判定依据;再次,建立旋转路径优化算法,寻找一条最优旋转路径;最后,通过两个五轴轮廓铣加工实例来验证该算法的可行性。该算法最大程度上避免了机床旋转干涉,在国内某数控厂得到了一定应用。
AC/BC;后置处理;旋转路径;旋转干涉
0 引言
五轴数控加工普遍存在旋转干涉而损伤刀具和零件,旋转干涉问题亟待解决,国内外针对五轴数控机床旋转轴角度优化进行了大量研究,文献[1-2]研究了AB双转台机床旋转角的优化算法,武跃[3]研究了AC双转台机床旋转角的优化,该算法整体上对A、C轴采用最短路径(Dijkstra)思想,没有考虑旋转轴在行程边界角度突变情况,代星[4]根据优势/劣势区间对BC双转台机床旋转角进行优化,但该算法并未清楚地阐述旋转干涉产生的本质,且没有对C旋转轴进行合理优化。唐清春[5]提出的AC双摆五轴机床旋转角优化解决了机床超程问题,但未考虑到旋转干涉。上述文献大多以旋转干涉现象为基础展开研究,并未完全了解旋转干涉本质,本文从旋转干涉的本质出发,给出基于旋转干涉的旋转路径优化算法。
本文以AC刀具双摆动机床旋转轴优化展开研究,如图1所示,在VERICUT平台仿真切削加工时两处位置出现干涉,红色椭圆框标记出了干涉位置。通过对比NC加工程序,观察发现这两处位置C轴角度突变过大。

图1 VERICUT仿真过程
1 原理与算法
1.1 旋转运动分析
考虑到平动轴对旋转运动无影响,为简化运动模型,现只对机床旋转轴运动展开分析。
1.1.1 旋转运动方程
第u组刀位数据(pu,vu)对应机床旋转坐标为θAC,u(θA,u,θC,u),其中vu坐标为(iu,ju,ku),刀轴矢量与旋转坐标存在如下对应关系[6]:
(1)
1.1.2 解的特点
给定旋转轴及旋转方向,从初始刀轴矢量v0旋转至当前刀轴矢量vu转过的最小角度称为基本角,用β表示。
AC机床旋转运动简化模型如图2所示,v0为初始刀轴矢量,vu为当前刀轴矢量,v0到vu的旋转运动可看成v0先绕X轴旋转至YOZ平面,再绕Z轴旋转至vu。刀轴矢量在YOZ平面的过渡状态有图3左中v0u和图3右中v0u′ 两种情况,其中βA、βC和βA′、βC′分别为刀轴矢量绕指定轴及旋转方向所对应的两组最小旋转角。
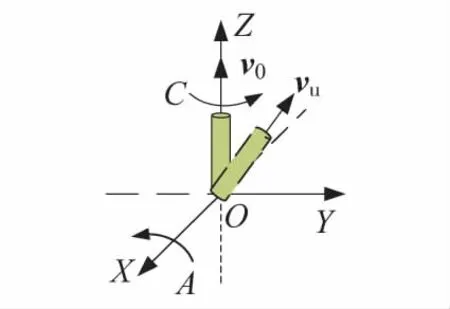
图2 AC机床旋转运动模型
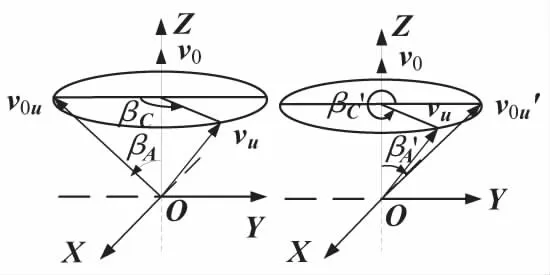
图3 旋转运动分解
假定机床A轴行程(-180°,180°),C轴无限旋转,则图3左中机床的旋转坐标θAC,u(θA,u,θC,u)为:θA,u=βA,θC,u=βC+m×360°(m为任意整数);图3右中机床的旋转坐标θAC,u(θA,u,θC,u)为:θA,u=βA′,θC,u=βC′+m×360°。βA、βA′和βC、βC′满足βA=-βA′,|βC-βC′|=180°。
按C轴旋转角从小到大对多组(θA,u,θC,u)进行排序,排序结果用解序列Su表示,Su={(θA,u,θC,u)|θA,u=(-1)mβA,θC,u=βC+m×180°,且m为任意整数},则(θA,u,θC,u)的分布为任意两组相邻解的θA,u相差一个正负号,θC,u相差180°。
1.1.3 自由曲面连续加工
如图4所示,圆柱立铣刀加工自由曲面f,l为加工时的某条刀位轨迹,给定l上相邻两组刀位信息(pu,vu)和(pu+1,vu+1),连续加工状态下刀具位姿连续变化,故当pu+1→pu时有vu+1→vu,得出自由曲面连续加工准则:
(2)
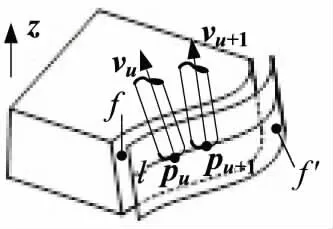
图4 自由曲面连续加工
1.1.4 相邻刀位旋转角度差
刀位轨迹l上第u、u+1组刀位数据分别为(pu,vu)和(pu+1,vu+1),对应机床旋转坐标为θAC,u(θA,u,θC,u)和θAC,u+1(θA,u+1,θC,u+1),相邻旋转角度差△θAC,u(△θA,u,△θC,u)可表示为:
△θAC,u(△θA,u,△θC,u)=θAC,u+1(θA,u+1,θC,u+1)-θAC,u(θA,u,θC,u)。
一般A轴行程[Amin,Amax]非对称且在(-180°,180°)范围内,例如[-100°,95°],令A1=min{|Amin|,|Amax|}A2=max{|Amin|,|Amax|},结合式(1)、式(2)以及旋转运动方程解的特点,当pu+1→pu时:
(1)若θA,u+1=θA,u,则

(2)若θA,u+1=-θA,u且|θA,u|=A1,则有:
此时A轴在行程边界发生相位反转。
1.2 旋转干涉原理
如图4所示,若l上存在相邻两组刀位信息(pu,vu)和(pu+1,vu+1),使得刀具从位姿(pu,vu)运动到(pu+1,vu+1)时,刀具因旋转轴运动突变而切伤材料体,就称为旋转干涉。
1.2.1 旋转干涉分析
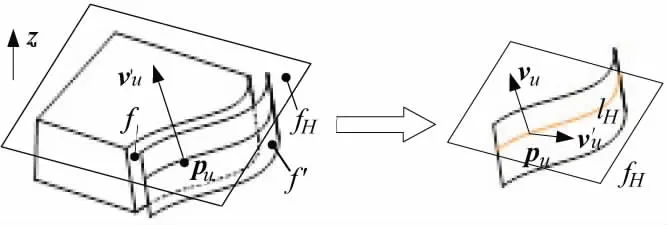
图5 相交曲线lH生成
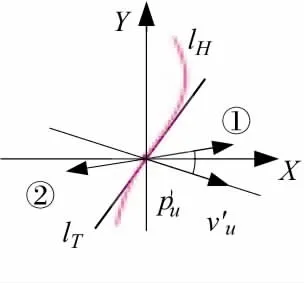
图6 C轴旋转干涉分析
1.2.2 旋转干涉检查依据
综上所述,在理想情况下,当刀具位姿从(pu,vu)到(pu+1,vu+1)发生旋转干涉时,一定有|△θC,u|≥180°,故在给定精度范围ε(ε>0)内,|△θC,u|≥180°-ε可作为检测旋转干涉的依据。
2 旋转路径优化算法关键技术
2.1 旋转路径
n个刀轴矢量{v1,v2,…vu,…vn}有n个解序列,从每个解序列中都选取一个元素构成一条旋转路径Path,旋转路径Path上的第一个旋转坐标(θA,1,θC,1)称为起始旋转坐标。
2.2 旋转路径优化
大多机床旋转轴都有行程范围,旋转轴在行程边界反转易发生旋转干涉,旋转干涉无法完全避免,本文从旋转轴连续加工区间出发,通过选取最优起始旋转坐标,将旋转干涉风险降到最低。
旋转轴连续加工区间:给定旋转轴的起始值,沿着旋转方向从起始值运动至行程边界,旋转轴在该区间段连续运动,当区间最大时,旋转干涉风险最低。
2.2.1A轴旋转坐标优化
一般A轴行程[Amin,Amax]非对称,令A1=min{|Amin|,|Amax|},以[-100°,95°]为例,[-100°,0°]称为优势区间,[0°,95°]称为劣势区间,图7上是由某零件加工刀轴矢量k的部分数据绘制的曲线(cos95°=-0.08716,cos95°=-0.17365),图7下是对应的机床A轴旋转坐标。首次k=-0.08716发生在pu=2位置处,从位置2之后A轴坐标值位于[-100°,-95°],假定位置2之前A轴坐标值位于[0°,95°],则A轴在位置2发生相位反转,由旋转干涉分析可知此时必发生旋转干涉,若位置2之前A轴坐标值位于[0°,-95°],则可避免A轴在位置2相位反转。
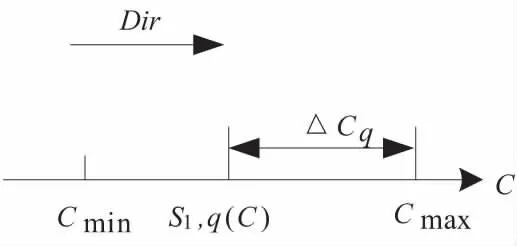
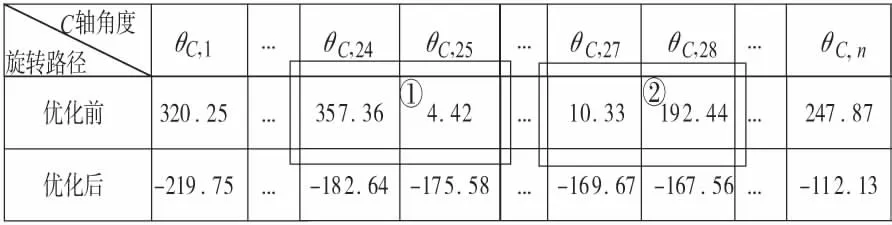
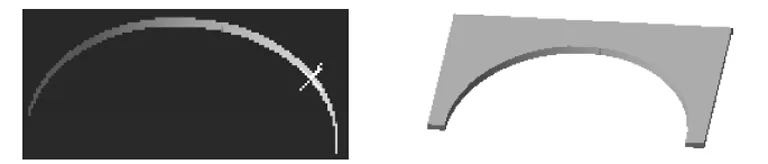
当出现首个k使得k 图7 刀轴k分量与机床A角对应关系 2.2.2C轴旋转坐标优化 若C轴无限旋转,则起始旋转坐标的C值对旋转干涉无影响,当C轴有行程限制时,起始旋转坐标的C值选取对旋转干涉也有一定影响。如图8所示,给定C轴行程范围为[Cmin,Cmax],起始刀轴矢量v1对应的解序列为S1,从S1中任取一解S1,q,C轴从S1,q(C)开始沿着旋转方向Dir首次到达行程边界的角度差用△Cq表示,S1中必存在一解使得|△Cq|最大,此时的C轴坐标为起始旋转坐标C值最优。 图8 C轴旋转优化 以C轴行程[-360°,360°]为例,图9给出了旋转路径C轴坐标优化前后的数据,“…”表示该位置C角变化平缓,红色方框部分为出现旋转干涉位置。对比两组数据,优化前起始C轴坐标θC,1为320.25°,|ΔCq|=39.75°,旋转路径上存在2处旋转干涉;优化后起始C轴坐标θC,1为-219.75°,|ΔCq|=579.75°,旋转路径上不存在旋转干涉。 图9 优化前后数据对比 实例验证采用的五轴AC机床对应行程为A轴[-45°,30°]和C轴[-360°,360°],图10a为复杂的开闭角[9]混合面,采用通用后置算法发现,图中白线位置前后A角分别为29.33°和-30.56°,机床在该位置发生A轴旋转干涉,采用优化算法后,该位置前后A角分别为-29.33°和-30.56°,该位置不再出现旋转干涉,图10b为优化算法的加工结果。 (a)开闭角混合面 (b)加工结果 图10 实例验证1 图11中红色轮廓面为某飞机零件待加工面,采用通用后置算法得到机床C轴坐标,起始坐标θC,1为81.72°,白线位置前后C角分别为359.95°和180.7°,采用优化算法后,θC,1为-98.28°,白线位置前后C角分别为179.95°和180.7°,白线位置不再出现旋转干涉。 图11 实例验证2 从旋转轴连续加工区间角度出发的旋转路径优化算法,能有效降低旋转干涉的风险,该优化算法已经集成于飞机结构件快速编程系统中并进行实际应用。 本文针对五轴数控AC机床展开研究,分析了旋转坐标解的特性和旋转干涉原理,给出了旋转干涉检查依据,并分别对A、C旋转轴坐标进行了优化处理,旋转路径优化算法已应用于实际工程中,能在一定程度上解决机床旋转干涉问题,对五轴数控BC机床同样适用。但该算法只是最大程度上避免旋转干涉,并不能完全解决旋转干涉,当本文算法失效时,仍需要在旋转干涉的位置人为增加一个抬刀处理[8]来避免干涉现象。对于复杂自由曲面无法直接采用该优化算法处理时,可将曲面拆分成若干面再处理。 [1] Munlin M, Makhanov S S, Bohez E L J. Optimization of rotations of a five-axis milling machine near stationary points[J]. Computer-Aided Design, 2004,36(12): 1117-1128. [2] Makhanov S S, Munlin M. Optimal sequencing of rotation angles for five-axis machining[J].The International Journal of Advanced Manufacturing Technology, 2007,35(1-2):41-54. [3] 武跃,王宇晗,毕庆贞. 五轴联动数控加工中旋转角的优化和选择[J]. 组合机床与自动化加工技术,2009(5):1-4,9. [4] 代星,熊蔡华,丁汉. 双转台式五轴机床后置处理中的最优选解问题研究[J]. 装备制造技术,2012(2):10-12. [5] 唐清春,马仲亮,刘谦,等. (A-C)式双摆头五轴机床旋转角的选择及优化[J]. 组合机床与自动化加工技术,2015(1):16-18. [6] 周济,周艳红. 数控加工技术[M]. 北京:国防工业出版社,2002. [7] 钟建琳,刘忠和,杨庆东. 空间自由曲面五轴联动数控加工[J]. 机械设计与制造,2011(9):129-131. [8] Jung Y H, Lee D W, Kim J S, et al. NC post-processor for 5-axis milling machine of table-rotating/tilting type[J]. Journal of Materials Processing Technology, 2002, 130: 641-646. [9] 周敏,郑国磊,罗智波,等. 利用主面扩展识别飞机结构件开闭角[J]. 计算机辅助设计与图形学学报,2015,27(12):2376-2383. AOptimizationalAlgorithmaboutRotationPathBasedonRotatingInterferencePhenomenonHappenedinFive-axisCNCMachineTools ZHOU Kang (School of Mechanical Engineering and Automation, Beijing University of Aeronautics and Astronautics, Beijing 100191, China) In order to solve the problem of interference phenomenon caused by unreasonable movement of rotation axis in five-axis CNC machine tools, a optimizational algorithm about rotation angle was proposed. A most optimizational rotation route is calculated automatically which could provide theoretical support for rotating interference phenomenon. Firstly, the solution properties of rotation angle was obtained bassed on equation of rotational motion and limit in five-axis CNC machine tools . Secondly, the production mechanism and decision condition of rotating interference were given.Thirdly, the algorithm about rotation route were built and the best one of them was found. Finally, the practicability of this algorithm was proved through two examples about five-axis profile milling. The algorithm avoids the rotation interference of machine tools to a great extent, and it has been applied in a certain NC factory in China. AC/BC; post-processor; rotation path; rotating interference 1001-2265(2017)11-0001-03 10.13462/j.cnki.mmtamt.2017.11.001 2016-12-31; 2017-02-08 高精数控机床与基础制造装备(2012ZX04010051) 周康(1989—),男,湖北监利人,北京航空航天大学硕士研究生,研究方向为CAD/CAM,(E-mail)806145732@qq.com。 TH161;TG506 A (编辑李秀敏)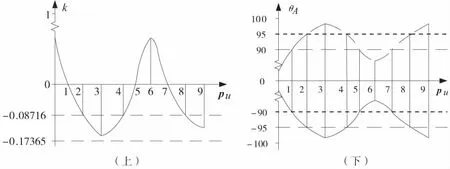
3 实例验证

4 结束语