柔性机械臂变刚度关节的设计与仿真研究
2017-11-30彭斯宁王春华
孙 军,彭斯宁,王春华
(1.沈阳建筑大学 机械工程学院,沈阳 110168;2.沈阳特种设备检测研究院,沈阳 110036)
柔性机械臂变刚度关节的设计与仿真研究
孙 军1,彭斯宁1,王春华2
(1.沈阳建筑大学 机械工程学院,沈阳 110168;2.沈阳特种设备检测研究院,沈阳 110036)
机器人广泛用于人们的生产生活中,机器人与人的接触也越来越频繁,人机交互的安全问题已经引起人们的重视。文章提出一种柔性变刚度机械臂关节,阐述变刚度关节的机械结构并对关节的变刚度原理进行分析,考虑电机阻尼和传动系统的等效转动惯量等影响,建立一种较为完善的关节动力学模型,分析系统的动态特性;最后基于Adams进行仿真碰撞试验,试验结果验证关节具有缓冲碰撞的特性,所设计的变刚度关节有利于保证人机交互的安全性。
变刚度关节;机械臂;动力学模型;碰撞仿真
0 引言
随着机器人行业的不断发展,机器人已经悄然改变了人们的生活。现在,很多的机器人不在生产车间按照固定程序做着重复的工作,而是进入社区,进入商场,做一些服务性质的工作,使得人们在生活的各个方面都不同程度的存在与机器人的交互,随之产生的就是机器人如何与人安全共处及更好的适应环境的问题。
相比传统的刚性关节,柔性变刚度关节能更好的适应人机交互的环境,现在所研究的变刚度关节多为仿骨骼肌的关节,即根据人的肌肉抽缩的特点,研制变刚度机械臂关节。德国航空航天中心设计出FSJ[1]和BAVS[2]为变刚度关节方面比较有代表性的成果。可变刚度关节按照变刚度原理的不同可以把变刚度关节分为以下几类:①平衡位置变刚度,这是一种在传统的刚性驱动器中加入一组刚度恒定的弹簧的方法,平衡位置变刚度原理是基于SEA[3]基础上提出的。其本质是将弹簧与刚性驱动器串联起来,整个关节的刚度由弹簧常数决定,通过电机改变其联接刚度,从而动态地改变弹簧的平衡位置来调节整个驱动器的虚拟刚度;②拮抗方式变刚度,拮抗方式是受到人手臂运动的启发,模仿人体手臂关节设计的一种变刚度方法,通过使用两个以拮抗方式工作的驱动器和非线性弹簧,可以实现平衡位置和刚度的调节,弹簧本身是非线性的。例如MIGLIORE 等设计的 ACSA[4],类似结构还有VSA[5],AMASC[6];③机构调整变刚度,通过改变弹性环节与刚性结构的连接情况,改变弹性环节的预拉紧或预加载荷,从而调节关节刚度。一般需要用到两个电机,平衡位置和刚度是分别控制的,以MACCEPA[7]为代表。
本文设计一种可变刚度的机械臂关节,基于板簧,弹簧的变刚度原理,阐述关节的机械机构组成,建立一种较为完善的关节动力学模型,软件仿真关节在不同刚度的情况下,关节不同的输出特性。
1 变刚度关节的原理
柔性变刚度关节具有实时调节关节刚度的特性,能更好的适应人机交互的环境,本文采用串联方式的变刚度原理,其基本原理是在关节驱动器与负载之间串联弹性机构,由刚度调节驱动器调节中间弹性机构的刚度,使得关节整体具有柔性变刚度的特性。
本论文所设计的机械臂关节的关节驱动器由伺服电机和谐波减速器构成;板簧,弹簧组成中间弹性机构,板簧一端连接关节的输入端,另一端连接关节的输出盘。由板簧的弯曲变形向输出连杆传递扭矩,刚度调节电机固定在底板上,两齿轮分别连接调节电机的输出轴和丝杠轴;滑块连接弹簧支点机构,4个线性压缩弹簧装入弹簧支点机构中。刚度调节伺服电机经过减速器减速驱动丝杠旋转带动滑块直线运动,带动弹簧沿板簧所在的直线运动,改变弹簧与板簧的受力作用点,从而改变板簧的有效长度,达到改变关节刚度的目的,使得关节具有柔性输出的特性。
2 变刚度关节的设计
如图1所示。输入底板由谐波减速器带动旋转,板簧一端固定在输入底板的矩形槽内,另一端穿过输出连杆的矩形槽。输入底板与输出连杆可绕旋转轴相对旋转。驱动输入底板旋转使得板簧产生弯曲变形,带动输出连杆转动,由于板簧的存在使得关节整体的输出表现出柔性特征。关节参数如下:关节直径110mm,整体高度82mm,刚度范围30~600Nm/rad,关节重量2.6kg,所能承受的最大扭矩18Nm。
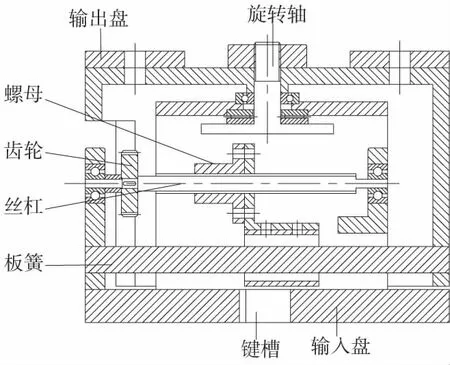
图1 变刚度关节结构图
3 变刚度关节动力学建模与仿真
3.1 关节动力学模型的建立
动力学模型是研究变刚度关节特性的核心,其精确程度对系统特性影响较大,准确建立关节的动力学模型对研究关节性能具有重要的意义。本关节整体采用伺服电机加谐波减速器驱动,将板簧弹簧中间机构等效成可由电机调节的非线性弹簧,在考虑电机电气阻尼,传动系统的阻尼和关节传动系统等效转动惯量的影响下,建立较为完善的关节动力学模型。如图2所示。
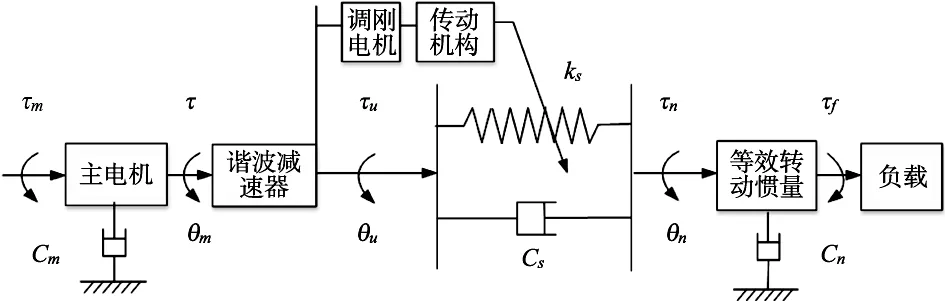
图2 关节动力学模型
本文所设计的变刚度关节,刚度由一小型伺服电机调节,且关节刚度与电机转角具有一一对应的关系:
(1)
其中,kS为关节某一时刻的刚度,θ为调刚电机的输出角度,N1为传动机构的减速比。非线性弹簧与阻尼器并联更能体现关节真实的输出情况,由图2的动力学模型可知柔性环节两端的力矩具有如下关系:
(2)
其中,τu为谐波减速器的输出扭矩,τn为柔性环节的输出扭矩,θu为谐波减速器的输出转角即柔性环节的输入转角,θn为柔性环节的输出转角。
根据刚体动力学知识,主电机端与负载端有如下关系:
(3)
(4)
其中,Jm、Jn分别表示主电机的转动惯量和负载的等效转动惯量;Cm、Cn分别表示电机阻尼系数和传动系统的阻尼系数;θm为柔性环节的输入转角;τm、τ、τf分别为电机驱动力矩,电机输出力矩和负载力矩。

(5)

(6)
其中,N为谐波减速器的减速比,取N=150联立上式,得关节完整的动力学模型为:
(7)
3.2基于MATLAB/Simulink的变刚度关节系统仿真
Simulink是MATLAB中的一种可视化仿真工具,提供一个动态系统建模、仿真和综合分析的集成环境[8-9],将式Laplace变换得:
设计变刚度关节更加关注的是在相同的驱动力矩的情况下,不同的关节刚度所表现出的不同的关节响应特性,本节仿真变刚度关节在不受外力负载,驱动力矩为5Nm阶跃信号的情况下,关节刚度分别为200,300,400,500Nm/rad时,关节末端输出的角度及角速度的变化关系。
Simulink建立变刚度关节动力学模型的可视化框图,如图3所示;关节末端输出角度如图4,图5所示;输出角速度如图6,图7所示。
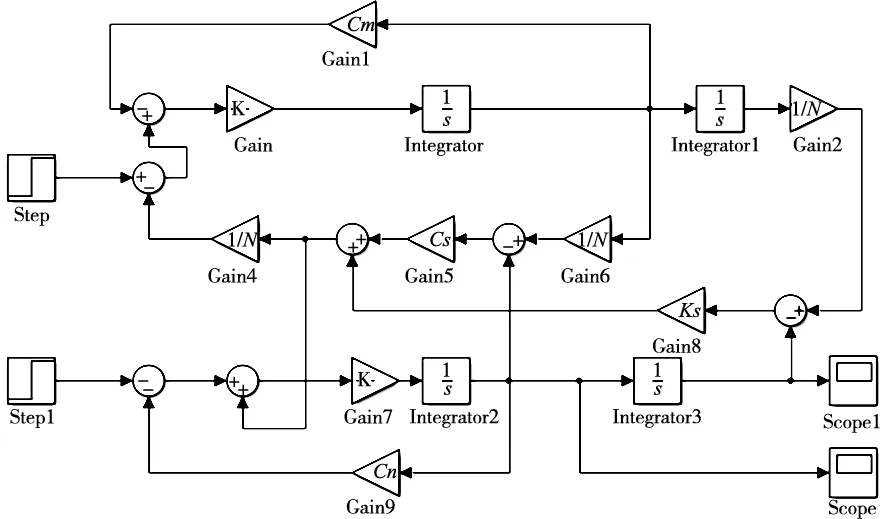
图3 关节动力学模型的可视化框图
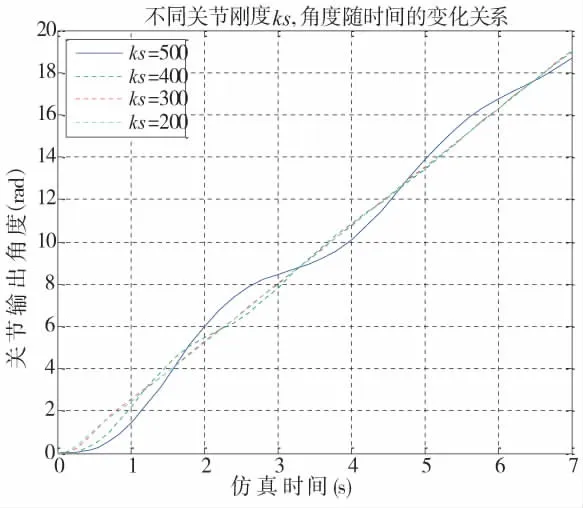
图4 关节末端输出角度
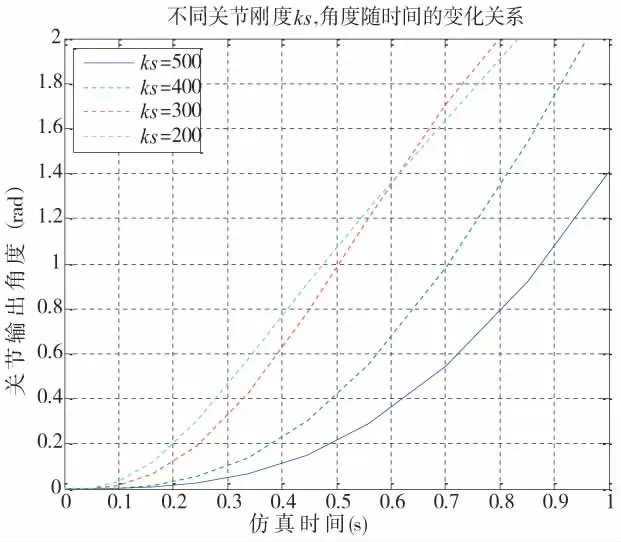
图5 输出角度局部放大图

图6 关节末端输出角速度
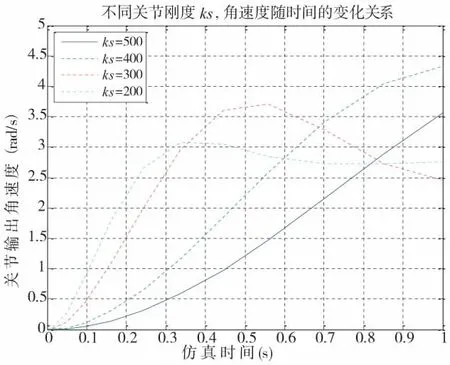
图7 输出角速度局部放大图
由仿真结果曲线得知,关节角速度从零开始稳定到终值,关节角度整体呈现线性,过程中都出现较大的波动,主要因为关节存在柔性机构。对于不同的关节刚度,关节末端响应明显不同,关节刚度较大时,关节响应速度较快,波动较小;关节刚度较小时,响应时间越短,关节响应速度较慢,波动较大。这一动力学特性比较符合实际情况。
4 基于Adams的仿真碰撞试验
4.1 安全性定义与标准
在机器人领域,由于机器人与人之间协同工作带来的危险因素主要来自碰撞带来的机械伤害,所以,在这里我们把机器人工作时与人或周围环境发生碰撞后对人或机器人的损害程度称作为机器人的安全性。
目前,国际上主流的机器人领域碰撞模拟仿真用到的安全性评价标准主要是借用汽车领域的头部损伤标准HIC(Head Injury Criteria)[10-11],本文将利用此评价标准来评判所设计的变刚度柔性关节是否具有安全性能。HIC定义如下:

4.2 试验设计
利用ADAMS强大的仿真功能,设计仿真实验台,给仿真平台添加约束、驱动及特殊作用力,最后设置好控制参数,完成求解与后处理。这里采用弹簧滑块作为被撞击的对象,假设滑块沿弹簧所在直线运动[12,13]。
试验参数配置如下,驱动力矩为5Nm,关节刚度分别为300Nm/rad,500Nm/rad和无限大刚度,输出连杆质量,长度分别为400g,200mm;滑块为质量200g,边长为30mm的正方形,弹簧长120mm,刚度为100N/m。
仿真过程如下,向关节输入端施加相同的驱动力矩,带动输出连杆旋转,连杆转过一定的角度后与滑块发生碰撞,继续旋转直到仿真结束,滑块在撞击力的作用下开始向固定方向运动,压缩弹簧产生振动;分析在不同的关节刚度的情况下滑块在发生碰撞到碰撞结束整个时间段内的位移变化、速度变化和加速度变化,通过HIC计算公式,计算出不同的HIC数值并进行比较。
4.3 试验结果与分析
在驱动器驱动输出连杆与滑块发生碰撞后,观察整个过程中滑块的加速度变化。可以看到在其他参数一样,刚度的不同,碰撞之后的滑块加速度也各不相同,且刚度越大,加速度越大。最终测得在刚度为300Nm/rad时,滑块最大加速度为7080456mm/s2;在刚度为500Nm/rad时,滑块最大加速度为7388681mm/s2;在刚度为无限大刚度时,滑块最大加速度为7511611 mm/s2。

5 结论
本文主要设计一种柔性变刚度关节,主要结论如下:
(1)提出一种基于弹簧,板簧的变刚度原理,设计一种刚度调节方式,基于伺服电机驱动滚珠丝杠带动弹簧平动,通过改变弹簧与板簧的接触点来改变关节的整体刚度,实现刚度调节范围为30~600Nm/rad,可实时调节关节的刚度以适应不同的工作情况,同时起到缓冲碰撞的作用。
(2)提出一种相对完善的变刚度关节动力学模型,Simulink仿真关节在不同刚度值的情况下,关节的输出角度和角速度特性;仿真结果表明关节动力学特性符合实际情况,说明所建立的动力学模型是合理的。
(3)基于adams软件进行关节的碰撞仿真,仿真结果表明所设计的变刚度柔性关节具有缓冲碰撞的特性,相比于传统的刚性关节有利于提高人机交互的安全性。
[1] Sebastian Wolf, Oliver Eiberger,Gerd Hirzinger. the DLR FSJ: Energy Based Design of a Variable Stiffness Joint[J].IEEE Conference on Robotics and Automation, 2011,19(6):5082-5089.
[2] Werner Friedl, Hannes H6ppner, Florian Petit,et al. Wrist and Forearm Rotation of the DLR Hand Arm System Mechanical Design, Shape Analysis and Experimental Validation[J]. IEEE Conference on Intelligent Robots and Systems,2011:1836-1842.
[3] Zheng A, Mei B C, Zhu J Q. Manufacture of fine grain diamond-carbide compact for cutting tool[J]. Journal of Wuhan University of Technology, 2004.
[4] Ashrafi S A, Sharif S, Farid A A, et al. Performance evaluation of carbide tools in drilling CFRP-Al stacks[J]. Journal of Composite Materials, 2013, 48(17): 2071-2084.
[5] TONIETTI G,SCHIAVI R,BICCHI A. Design and control of a variable stiffness actuator for safe and fast physical human/robot interaction[C]// Proceedings of the 2005 IEEE International Conference on Robotics and Automation,18-22 April,2005,Barcelona,Spain. IEEE,2005:526-531.
[6] HURST J W,CHESTNUTT J E,RIZZI A. The actuator with mechanically adjustable series compliance[J]. IEEE Transactions on Robotics,2010,26(4):597-606.
[7] Vander borght B,Tsagarakis N G, semini C,et al. MACCEPA 2.0: Adjustable compliant actuator with stiffening characteristic for energy efficient hopping[M].IEEE International Conference on Robotics & Automation,2009: 544-549.
[8] 原一高, 张肖肖, 丁健俊, 等. 磨削参数对超细硬质合金磨削表面粗糙度的影响[J]. 工具技术, 2012, 46(5): 41-44.
[9] 张立勋.机电系统的建模与仿真[M].黑龙江:哈尔滨大学出版社,2009.
[10] J Versace, A Review of the Severity Index[J].Society of Automotive Engineers, 1971, 771-796.
[11] Vasic Milos, Billard Aude. Safety Issues in Human-Robot interactions[J], IEEE International Conference on Robotics and Automation. IEEE, 2013:197-204.
[12] Burgard W, Brock O, Stachniss C. Safety Evaluation of Physical Human-Robot Interaction via Crash-Testing[C]// Robotics: Science & Systems Iii, June, Georgia Institute of Technology, Atlanta, Georgia, Usa. DBLP, 2007:217-224.
[13] M Zinn O K B R, Salisbury J K. A new actuation approach for human friendly robot design[C]// IEEE International Conference on Robotics and Automation. IEEE, 2008:1747-1752.
DesignandSimulationofVariableStiffnessJointofFlexibleManipulator
SUN Jun1,PENG Si-ning1,WANG Chun-hua2
(1.College of Mechanical Engineering, Shenyang Jianzhu University, Shenyang 110168 ,China;2.Shenyang Special Equipment Inspection and Research Institute, Shenyang 110036, China)
Robots are widely used in people's production and life, and the contact between robots and human is more and more frequent. The security of human-computer interaction has attracted more attention. A variable stiffness joint of flexible Manipulator is proposed in this paper, the mechanical structure of variable stiffness joint is expounded, and the principle of variable stiffness joint is analyzed. Considering the influence of the damping of motor and the equivalent moment of inertia of the transmission system, a more perfect dynamics model of the joint is established, and the dynamic characteristics of the system are analyzed. Finally, based on Adams the collision test is simulated, the results show that the joint has the characteristics of buffering collision, and the designed variable stiffness joint can ensure the safety of human-computer interaction.
variable stiffness joint; manipulator; dynamic model; collision simulation
1001-2265(2017)11-0044-04
10.13462/j.cnki.mmtamt.2017.11.012
2017-06-14
孙军(1963—),男,辽宁大连人,沈阳建筑大学教授,博士,研究方向计算机集成制造系统,先进数控理论与技术,(E-mail)sunjun589@126.com;通讯作者:彭斯宁(1991—)男,沈阳人,沈阳建筑大学硕士研究生,研究方向为机器人关键技术,(E-mail)602931032@qq.com。
TH111;TG659
A
(编辑李秀敏)